¶ 1.本マニュアルについて
Revopoint 3Dスキャナーのユーザーマニュアルへようこそ!このマニュアルは、MIRACO Plusの操作方法と指示を提供します。初めて使用する前にこのマニュアルをお読みいただき、スキャナーを正しく安全にご使用ください。必要に応じて、ナビゲーションバーのトピックをクリックすると、該当セクションにすぐ移動できます。
製品マニュアルの電子版が必要な場合は、マニュアルの左側の章ナビゲーションバーの下部にある[印刷形式]ボタンをクリックし、[PDFとして保存]を選択して保存することで、マニュアルのPDFファイルをダウンロードできます。
 |
 |
¶ 1.1著作権
本マニュアルの著作権はRevopoint 社に帰属し、法律によって保護されています。無断での複製、譲渡、販売、または第三者による使用は一切禁止します。本マニュアルは、Revopoint MIRACO Plus の操作に関する参考資料としてのみご利用いただけるものであり、それ以外の目的での使用できません。
¶ 1.2 安全指示




¶ 1.3ご使用前に
①Revopoint は以下のチュートリアル動画およびドキュメントを提供しています。:
- クイックスタートガイド
- ユーザーマニュアル
- チュートリアル動画
初めて使用する前に、チュートリアル動画をご覧いただき、クイックスタートガイドをお読みください。また、スキャンを開始する前に、本マニュアルをご確認ください。
② 本マニュアルに記載されたソフトウェアの画面や画像は参考用です。実際の画面は、最新のソフトウェアバージョンに基づいてご確認ください。
¶ 1.4 お問い合わせ
QRコードをスキャンして、サポートチームにご連絡ください。

最新情報は SNS で!

¶ 2. スキャン開始
初めてのスキャンでは、付属のサンプル彫像をスキャンすることを推奨します。スキャナーを起動後、以下の手順に従って設定を行い、スキャンを開始してください。
¶ 2.1 ミニターンテーブルの接続
ステップ1:ターンテーブルの電源ケーブルを PC に接続し、電源インジケーターが緑に点灯するまで確認してください。
ステップ2:サンプル彫像をターンテーブルの上に置き、スイッチを左右に動かして回転方向を調整できます。ノブを回すことで回転速度を変更できます。
ご注意:小型オブジェクト(例:サンプル彫刻)をスキャンする場合、ミニターンテーブルの使用を推奨します。
¶ 2.2スキャンモード
「スキャン」と「近景」を選択して、サンプル彫刻をスキャンしてください。

¶ 2.3 スキャン前の設定
サンプルの彫刻をスキャンする際、おすすめのスキャン設定は[高精度]、[特徴]および[一般]です。[カラー]をオフにしてください。また、[平面消去]もオフにすることをおすすめします。

¶ 2.4スキャン距離
スキャン距離表示バーが「ベスト」または「良い」と表示されるまで、スキャナーと対象物との距離を調整してください。
ご注意:距離が変わると露出も変わります。露出を調整する前に、適切な距離を確保してください。
¶ 2.5 露出調整
深度カメラの露出バーを手動で調整し、プレビュー画面の赤色または青色のエリアを最小限に抑えてください。
ご注意:カラーオフ時は、RGB露出・ホワイトバランス・補助照明の調整は不要です。
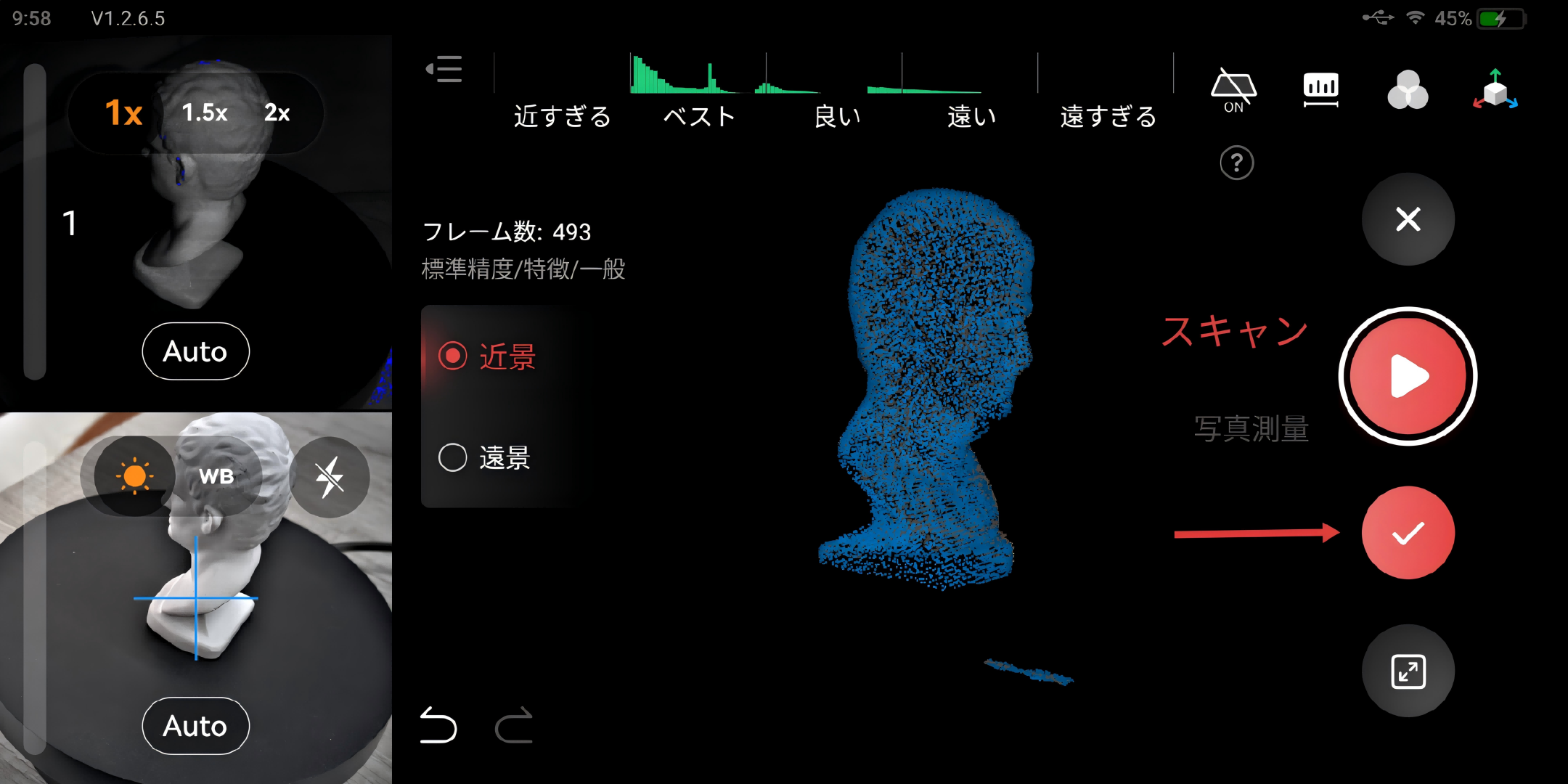
¶ 2.6 スキャン開始
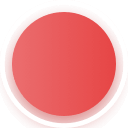 開始ボタンをタップして、スキャンを開始します。
開始ボタンをタップして、スキャンを開始します。
ご注意:ハンドヘルドスキャン時は、適切な距離内でスキャナーを対象物の周りでゆっくり動かしてください。
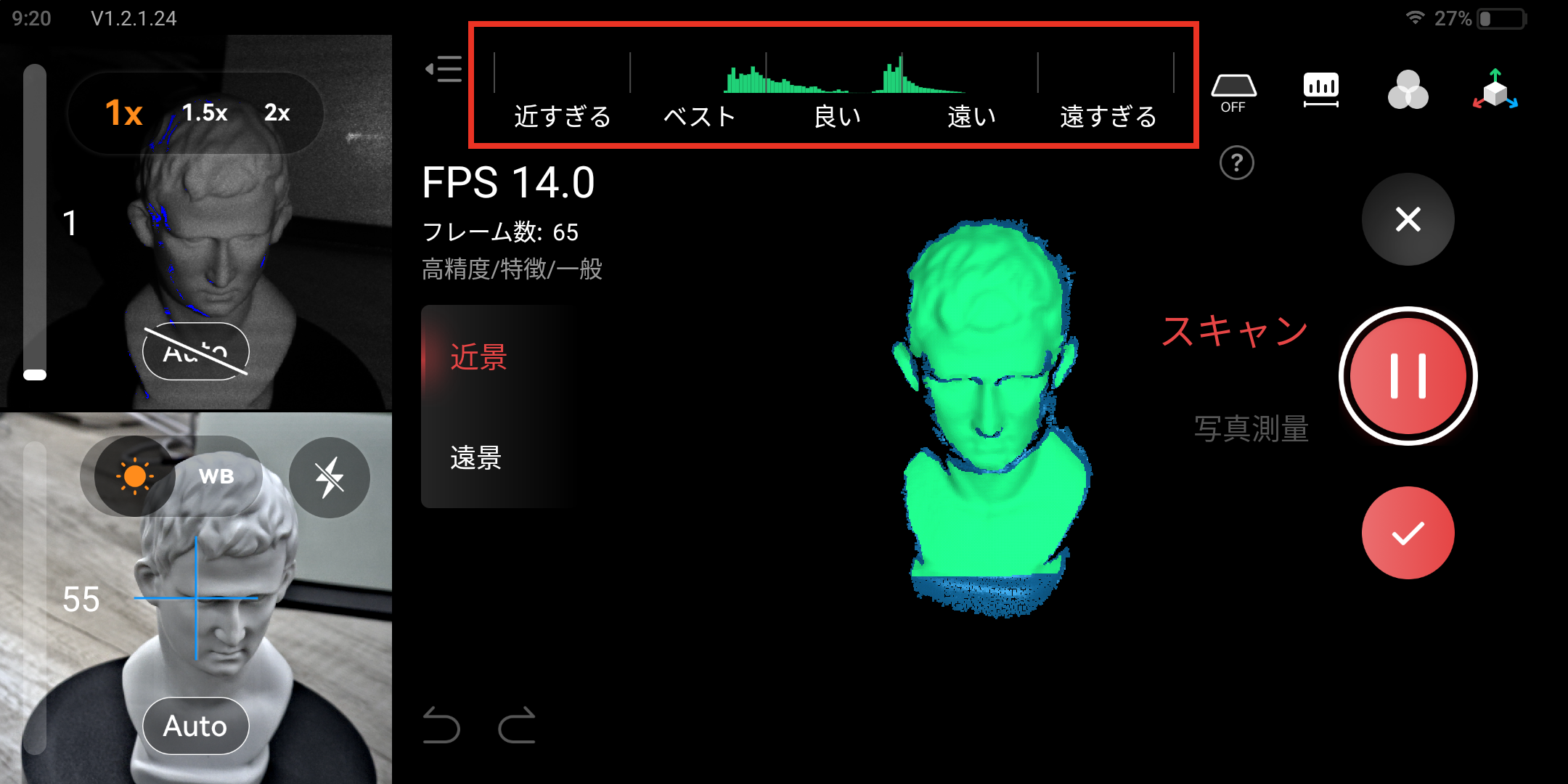
¶ 2.7 一時停止/完成
 一時停止ボタンをタップしてモデルを一時停止し、確認することができます。
一時停止ボタンをタップしてモデルを一時停止し、確認することができます。
スキャンを一時停止時に  をタップして全画面表示できます。
をタップして全画面表示できます。
モデルに不満がある場合は、  キャンセル ボタンをタップしてスキャンをキャンセルするか、スキャンを一時停止した状態で
キャンセル ボタンをタップしてスキャンをキャンセルするか、スキャンを一時停止した状態で  元に戻す/
元に戻す/  やり直すボタンをタップし、モデルを調整してください。
やり直すボタンをタップし、モデルを調整してください。
モデルが不完全な場合は、 続きボタンをタップしてスキャンを再開してください。
続きボタンをタップしてスキャンを再開してください。
モデルが完成したら、 完了ボタンをタップしてスキャンを終了します。
完了ボタンをタップしてスキャンを終了します。
ホームページまたはポストプロセス画面で利用できるス画面操作のジェスチャー:




¶ 3. MIRACO Plus の概要
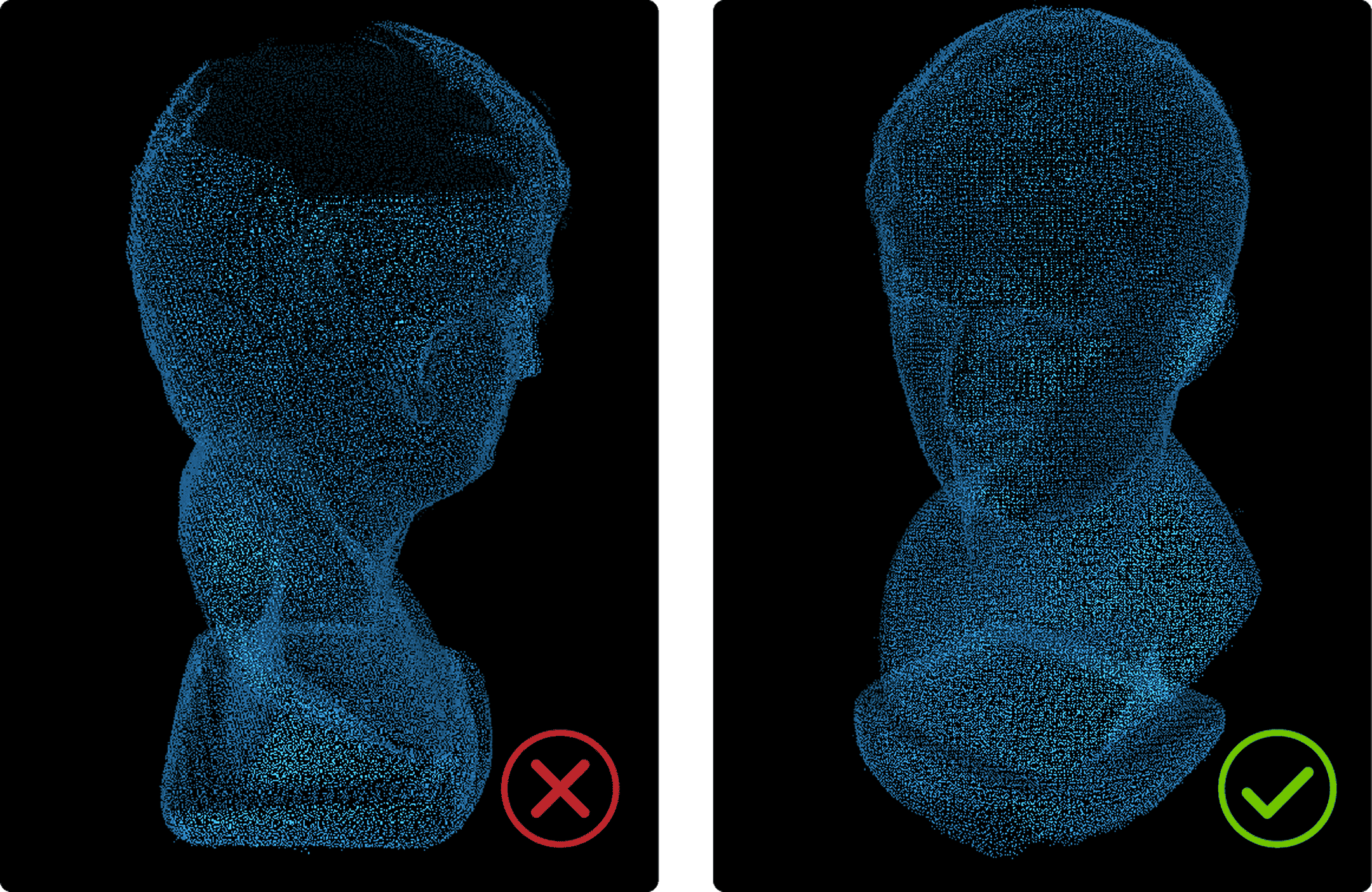
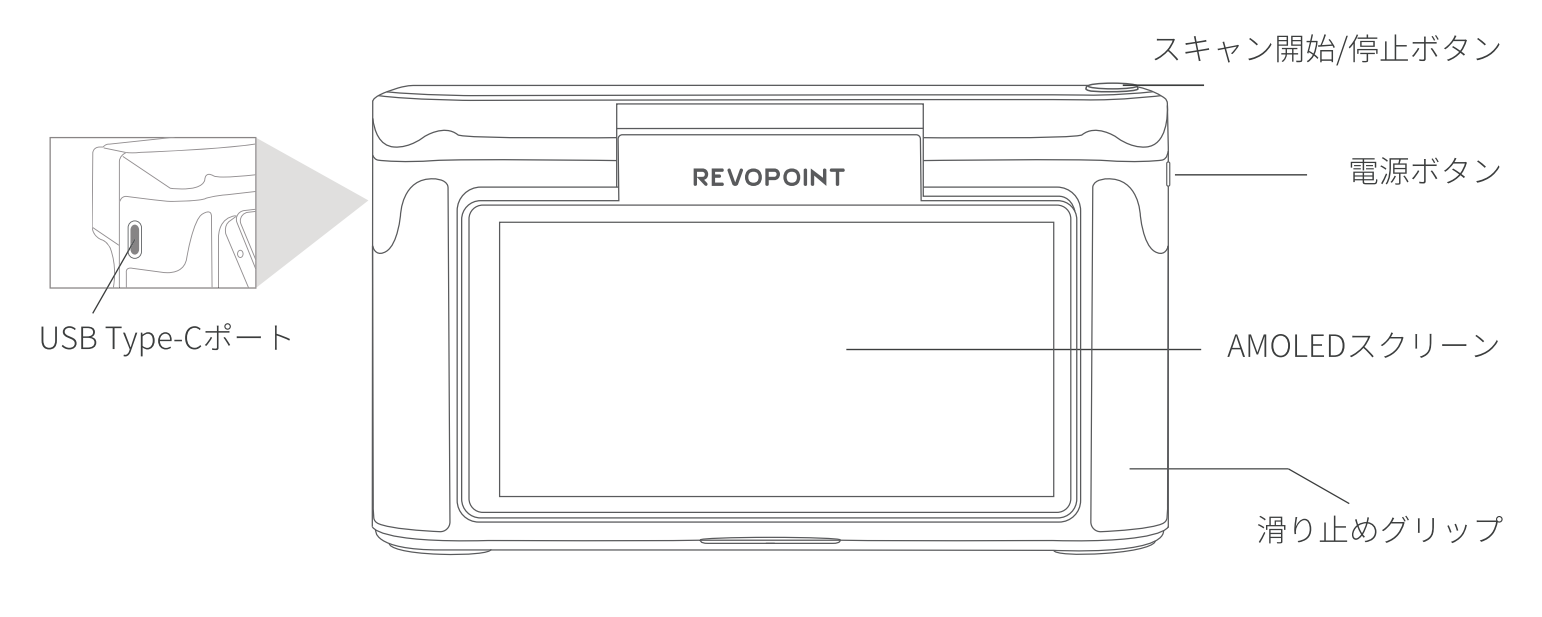
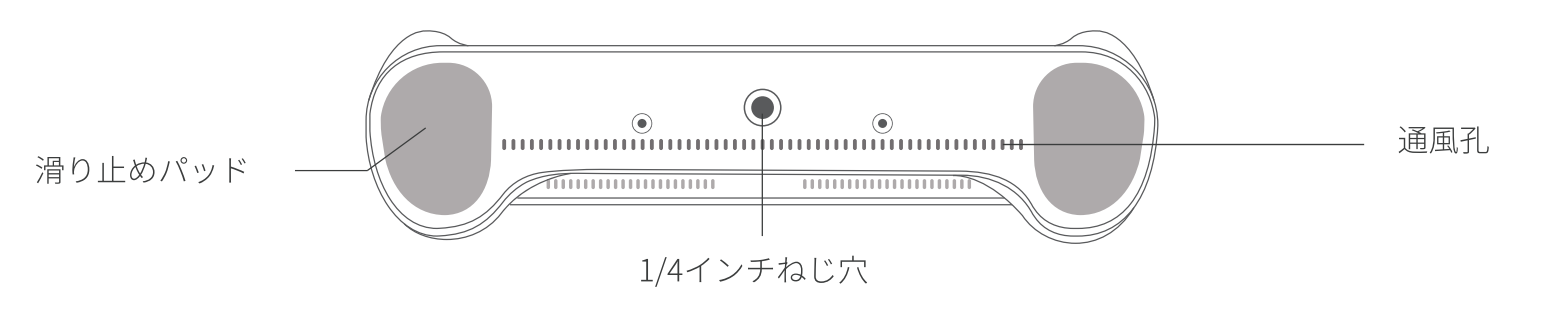
¶ 3.1 製品外観
¶ 3.2 パッケージ内容

アダプターは国や地域によって異なる場合があります。
コーデュラターゲットセット(磁着式と粘着式)がそれぞれ 208 個含まれています。
コーデュラターゲットセットを組み合わせたり、他の PMK セットのコーデュラターゲットと混ぜたりしないでください。
¶ 4.初回使用
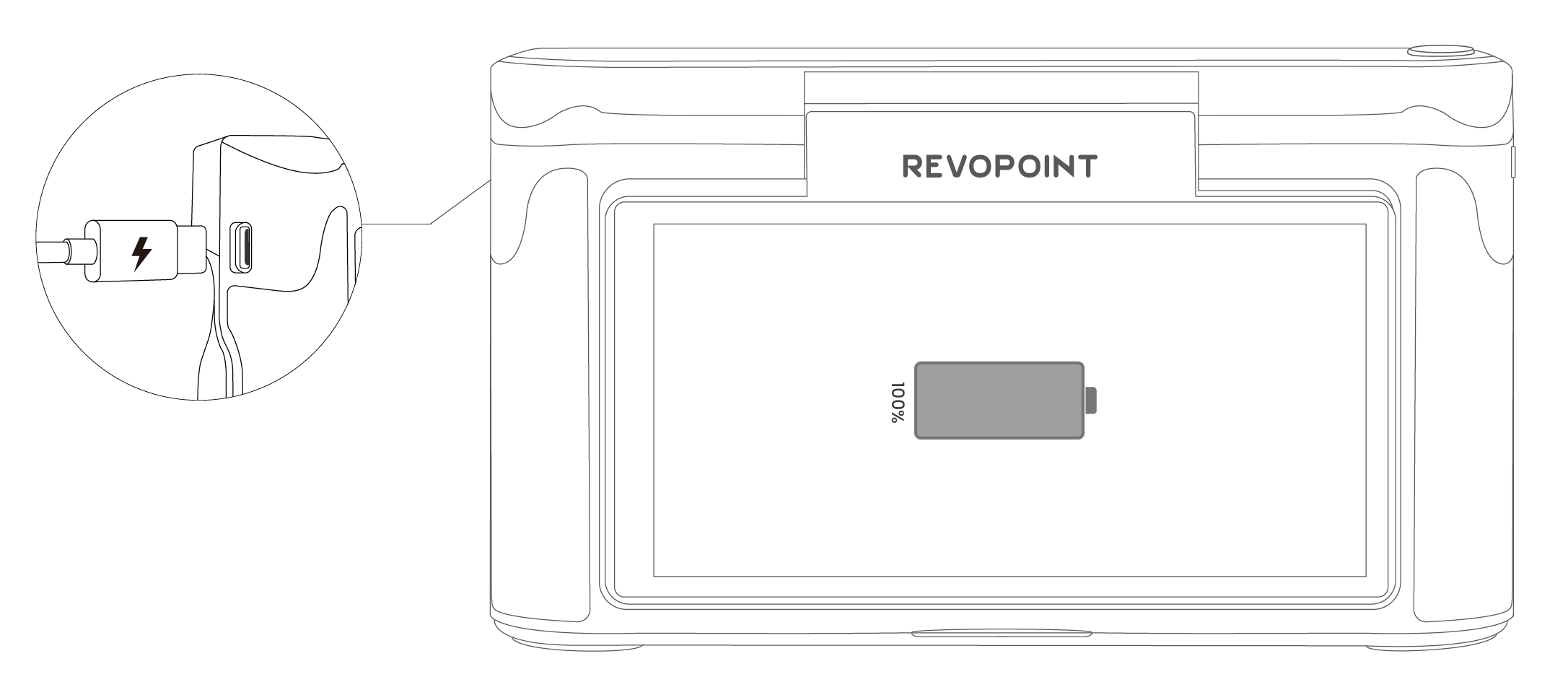
¶ 4.1 バッテリー要件
使用前に、MIRACO Plusを 60%以上充電してください。
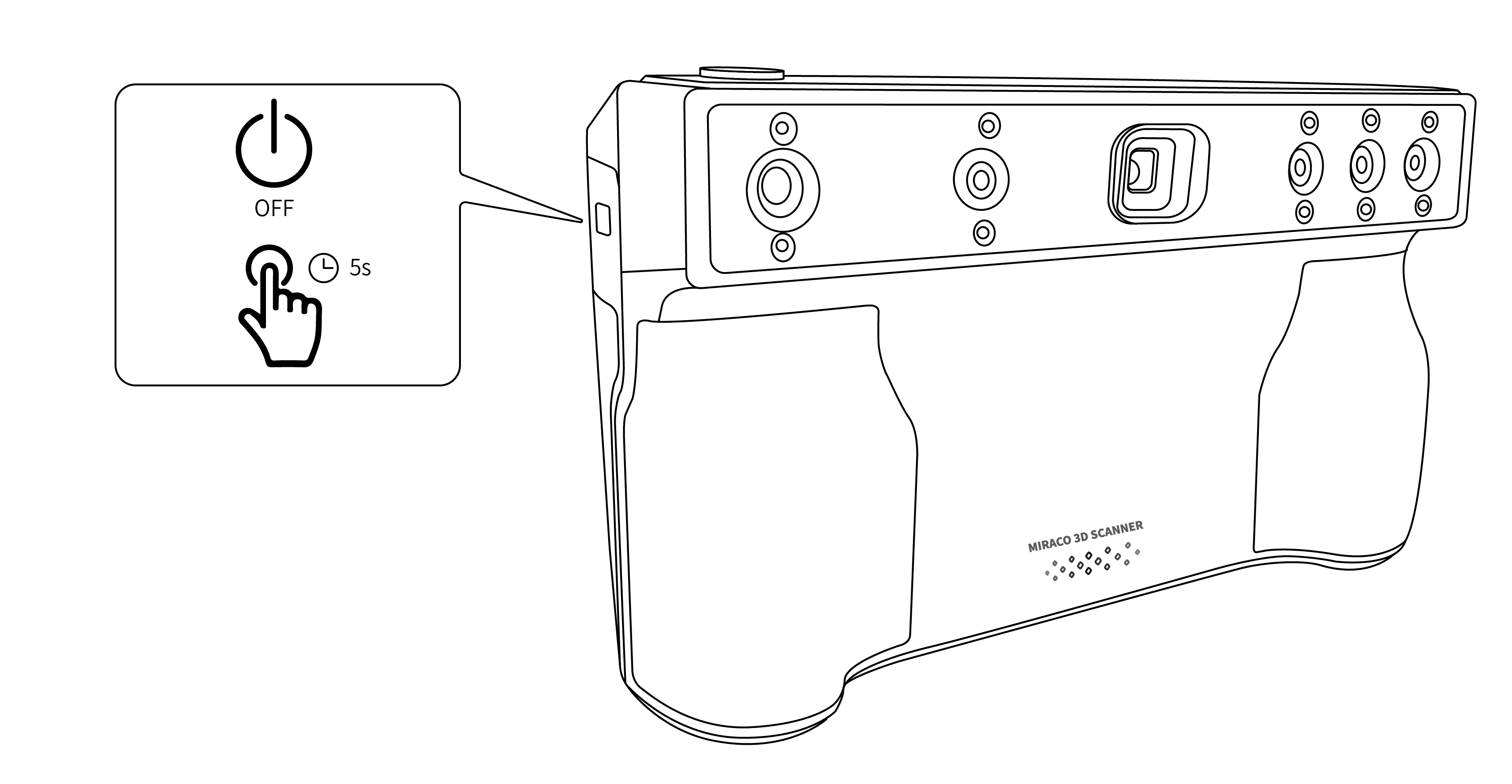
¶ 4.2 初回起動手順
ステップ1:電源ボタンを 5 秒間長押しして起動します(シャットダウンも同様です)。
ステップ2:使用する言語を選択します。
ステップ3:Wi-Fi に接続し、プロジェクト転送やソフトウェア更新通知を受け取れるように設定します。
ステップ4:タイムゾーン(地域)を選択し、必要に応じて日付と時刻を手動で調整してください。
ステップ5:[次へ]ボタンを押し、スキャン画面に進みます。
¶ 5. スキャン設定センター
画面上部から下にスワイプ:クイック設定パネルが表示されます。

① 通知:ソフトウェア更新、USB 接続状態、バッテリー残量低下などの通知を表示します。
② WLAN:ネットワーク接続を確認できます。アイコンを長押しすると Wi-Fi 設定画面へ移動します。
③ キャスト:スキャン画面をテレビなどの外部ディスプレイにリアルタイムでキャストできます。
④ 回転:画面の自動回転(180°)をサポートしています。
⑤ 画面キャプチャ:MIRACO Plus の画面をキャプチャできます。
⑥ 画面録画:MIRACO Plus の画面を録画できます。チュートリアル作成、製品デモ、操作記録にご利用いただけます。
⑦ 設定:タップして、MIRACO Plus のメイン設定画面に進みます。
⑧ 音量:音量を調整できます。0 に設定するとすべての音をミュートします。
⑨ 明るさ: MIRACO Plus の画面の明るさを調整できます。
a. WLAN
タップしてネットワーク接続を変更します。
b. ソフトウェア更新
画面上部から下にスワイプし、[設定] > [WLAN] でネットワークに接続します。
[ソフトウェア更新]をタップし、新しいバージョンがあるか確認します。
更新がある場合は[ダウンロードしてインストール]をタップします。
更新完了後、MIRACO Plus は自動的に再起動します。
c. 情報
タップして、製品名、シリアル番号、RAM、アプリバージョン、システムバージョンを表示します。
d. クイックスタートガイド
タップして、MIRACO Plus のクイックスタートガイドを表示します。
e. チュートリアルビデオ
タップして、MIRACO Plus のチュートリアル動画を視聴します。
f. カウントダウン
スキャン開始ボタンをタップしてから数秒間の準備時間を設定します。
g. モデル特性
タップして、データのカラーやテクスチャを変更します。
h. ストレージ
使用済みストレージ容量を表示します。
i.スキャナーの校正
スキャナーをキャリブレーションして、精度を確保します。
j. スクリーン録画とスクリーンショット
タップして、MIRACO Plus に保存された画面録画とスクリーンショットを表示します。録画やスクリーンショットは外部ストレージにエクスポートすることも可能です。Wi-Fi を通じてモバイル端末の Revo Scan(V5.3.9)に共有することも可能です。
k. IMU 校正
IMU を校正し、トラッキング精度を向上させます。
l. タイマー
一定時間後に、MIRACO Plus は自動でシャットダウンします。
m. 言語
表示言語を選択します。
n. 時間
日付、時刻、タイムゾーンを設定します。
o. 復元
アプリデータの消去、スキャナーのリセット、キャリブレーションの復元を行います。
p. フィードバック
改善点や意見を送信します。
q. 電源オフ
MIRACO Plusをシャットダウンします。
¶ 6. スキャン
¶ 6.1 ハンドヘルドスキャン&卓上スキャン
ハンドヘルドスキャンを行う際、スキャナーを自由に動かすことができ、様々な角度から物体の細部を捉えることができます。ただし、スキャン中はスキャナーを安定してゆっくりと動かすようご注意ください。
MIRACO Plus を卓上スキャナーとして使用する場合、スキャナーを動かさずに物体をスキャンすることができます。スキャンを行う前に、スキャン対象の物体をミニターンテーブルの上に置きます。また、MIRACO Plus を三脚に接続して卓上に平置きすることで、角度を調整することができます。
¶ 6.2 視野 & 光源
Depthカメラのプレビュー画面には、スキャン対象の物体のみが表示されるようにしてください。カラーモデルが必要な場合は、物体に均等に光が当たり、物体表面に影ができないようご注意ください。
¶ 7. ソフトウェア機能
¶ 7.1 スキャンインターフェース
スキャン開始前

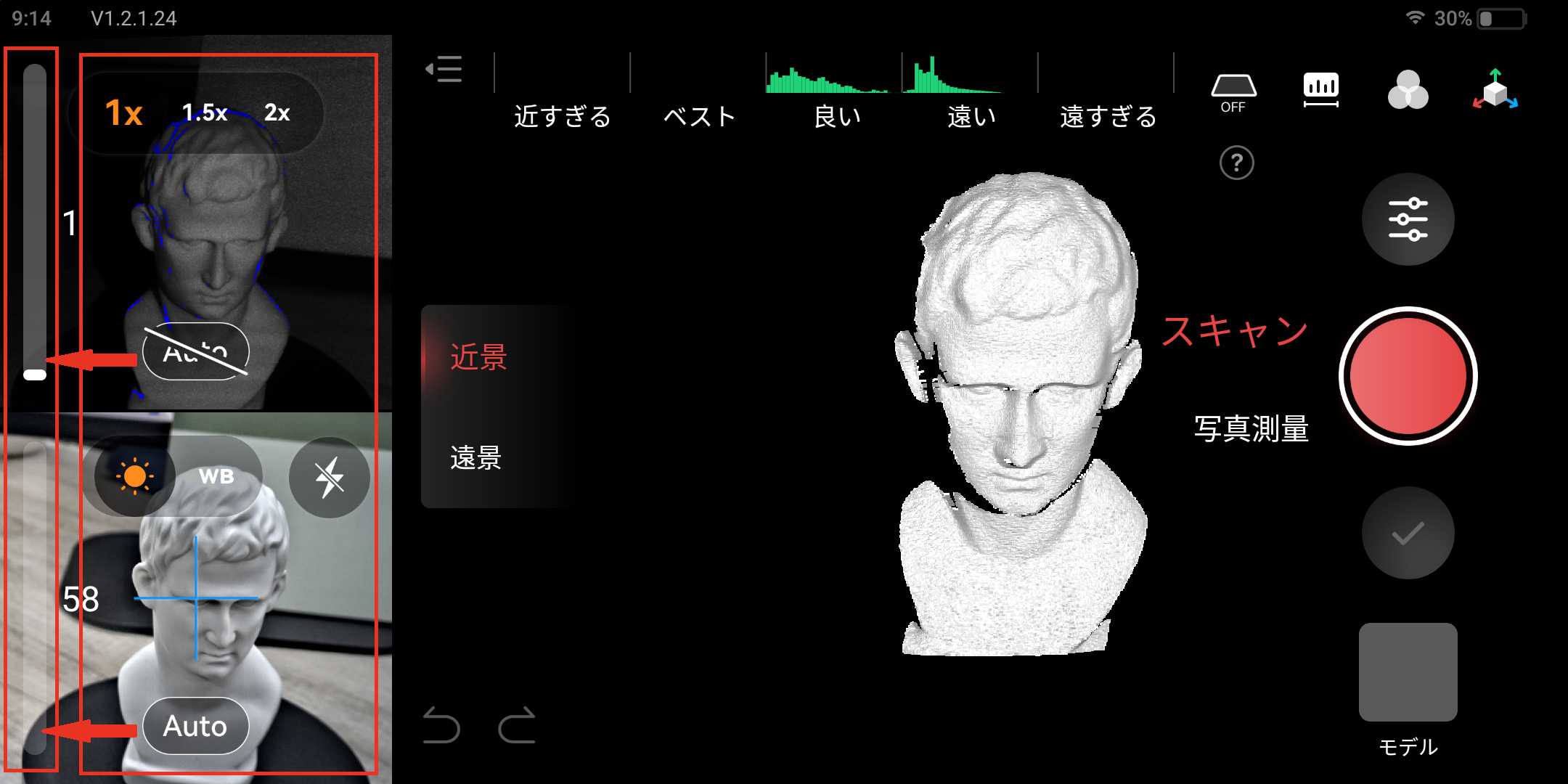
① Depth カメラプレビューウィンドウ
Depth カメラのリアルタイム映像を表示します。
Depth カメラの露出を調整することは、良い 3D モデルを得るために非常に重要です。Autoボタンをタップすると、Depth カメラの露出は「自動」に切り替わります。もう一度タップして、自動露出をオフにした後、スライダーをドラッグして、Depth カメラのプレビューウィンドウ内でオブジェクトに青と赤の部分ができるだけ少なくなるよう調整し、オブジェクト全体がグレーになるまで調整してください。
- ノイズを低減し、平滑度を高め、1.5 倍および 2 倍の赤外線光学ズームでより細かいディテールを捉えます。
② RGB カメラプレビューウィンドウ
RGB カメラのリアルタイム映像が表示されます。
- RGB カメラの露出とホワイトバランスを調整し、より良いカラースキャンを実現できます。
- 適切な露出とホワイトバランスは、高品質なカラー 3D モデルを生成するために不可欠です。カラーモデルをスキャンする際は、プレビュー画面に表示されるオブジェクトの明るさや色合いが実物とほぼ一致するまで、RGB カメラの露出を調整してください。
- 必要に応じて、フラッシュアイコンをタップすると補助ライトを点灯できます。
- Auto アイコンをタップすると、自動露出/ホワイトバランスのオン・オフを切り替えられます。
- 太陽または WB アイコンをタップすると、露出とホワイトバランスの制御モードを切り替えられます。
- 露出とホワイトバランスは、それぞれ自動モードを個別にオン・オフできます。自動モードをオフにすると、スライダーをドラッグして露出やホワイトバランスの値を手動で調整できます。
③ 遠近景モードの切り替え
遠近景モードボタンをタップすると、2 つのモードを切り替えられます。
遠景モードは、車や人体など、遠くにある物体や大型の物体をスキャンするのに適しています。このモードのカメラシステムには大口径レンズが搭載されており、遠距離の細部を捉えやすくなっています。
近景モードは、ネジや精密な模型など、近距離にある細かいディテールを持つ小さな物体のスキャンに適しています。このモードのカメラシステムには小口径レンズが搭載されており、複雑なディテールを正確に捉えることができます。
遠景モードと近景モードの使用に関する詳細情報については、以下のチュートリアルビデオをご参照ください。
④ やり直す/元に戻す
「やり直す」および「元に戻す」機能では、複数のスキャンフレームを削除または復元することができます。スキャンを一時停止することで、ミスやデータの不備を修正することが可能です。「元に戻す」ボタンを長押しすることで、複数の操作を一括で取り消すことができます。
⑤ モデルウィンドウ
- 3D モデルのプレビュー、スキャン中に取得したデータ、または最終的に完成したモデルを表示します。
- スキャン中は、緑色が現在キャプチャ中のデータ、青色がすでにキャプチャされたデータを表示します。
- カラースキャンでは、緑色のエリアが現在キャプチャ中のデータ、カラー表示のエリアがすでにキャプチャされたデータを表示します。
⑥ スキャン距離表示バー
対象物とスキャナー間の距離を示します。バーが緑色(ベスト)になったらスキャンを開始することをお勧めします。
⑦ ツールバー
- 平面消去
検出された不要な平面(テーブルや床など)の自動削除を有効にするには、この機能をオンに切り替えます。平らな面が多い対象物をスキャンする場合は、これをオフにして、対象物の表面が削除されないようにしてください。
- スキャン距離の調整
スライダーを使用して Depth カメラの作動距離を調整し、背景や前景の不要なオブジェクトを無視します。
- カラースキャン

- カラースキャンを実行する際、モデルの色の表示/非表示を切り替えることができます。
• 3D 座標:座標ボタンをタップすると、モデルが選択した面の中央に配置されます。
⑧ スキャンモードの設定:
詳細な設定方法については、本章の第 2、第 3、および第 4 項をご参照ください。
⑨ スキャンモードと写真測量モードの切り替え
モード名をタップすることで、スキャンモードと写真測量モードを切り替えられます。なお、スキャン中はモードの切り替えができませんので、スキャンを再開する際は、同じモードを維持してください。
- スキャンモード:
[開始]ボタンを押した後、スキャナーまたは物体を動かしながら、複数の角度から物体の表面データを取得します。スキャンモードは、物体の形状を素早く捕捉したい場合に適しています。
- 写真測量モード:
スキャナーを物体に向け、[開始]ボタンを繰り返し押して、物体を 1 フレームずつ撮影します。この際、隣接するフレーム同士が 50%以上重なるようにしてください。写真測量モードは、物体の詳細な形状やテクスチャを高精度に取得したい場合に最適です。
写真測量モードの使用方法:
手順 1: [写真測量]をタップして、モードを切り替えます。
手順 2: 露出やその他のスキャンパラメータを調整します。
手順 3: 撮影ボタンをタップして、1 フレーム画像を記録します。
➉ スキャン操作ボタン
スキャンの開始/一時停止/再開、およびスキャンの終了を行うためのボタンです。
開始ボタン :スキャンを開始します。
一時停止ボタン :スキャンを一時停止します。
全画面表示:スキャンを一時停止時に をタップして全画面表示できます。
再開ボタン :一時停止中のスキャンを再開します。
削除/保存/キャンセルボタン :現在のスキャンデータを削除する、保存して新しいスキャンを開始する、「モデル削除」操作をキャンセルする機能があります。
終了ボタン :すべてのデータの取得が完了したら、スキャンを終了します。
⑪ モデル
タップすると、モデルの編集やプロジェクトの管理を行う画面に移動します。
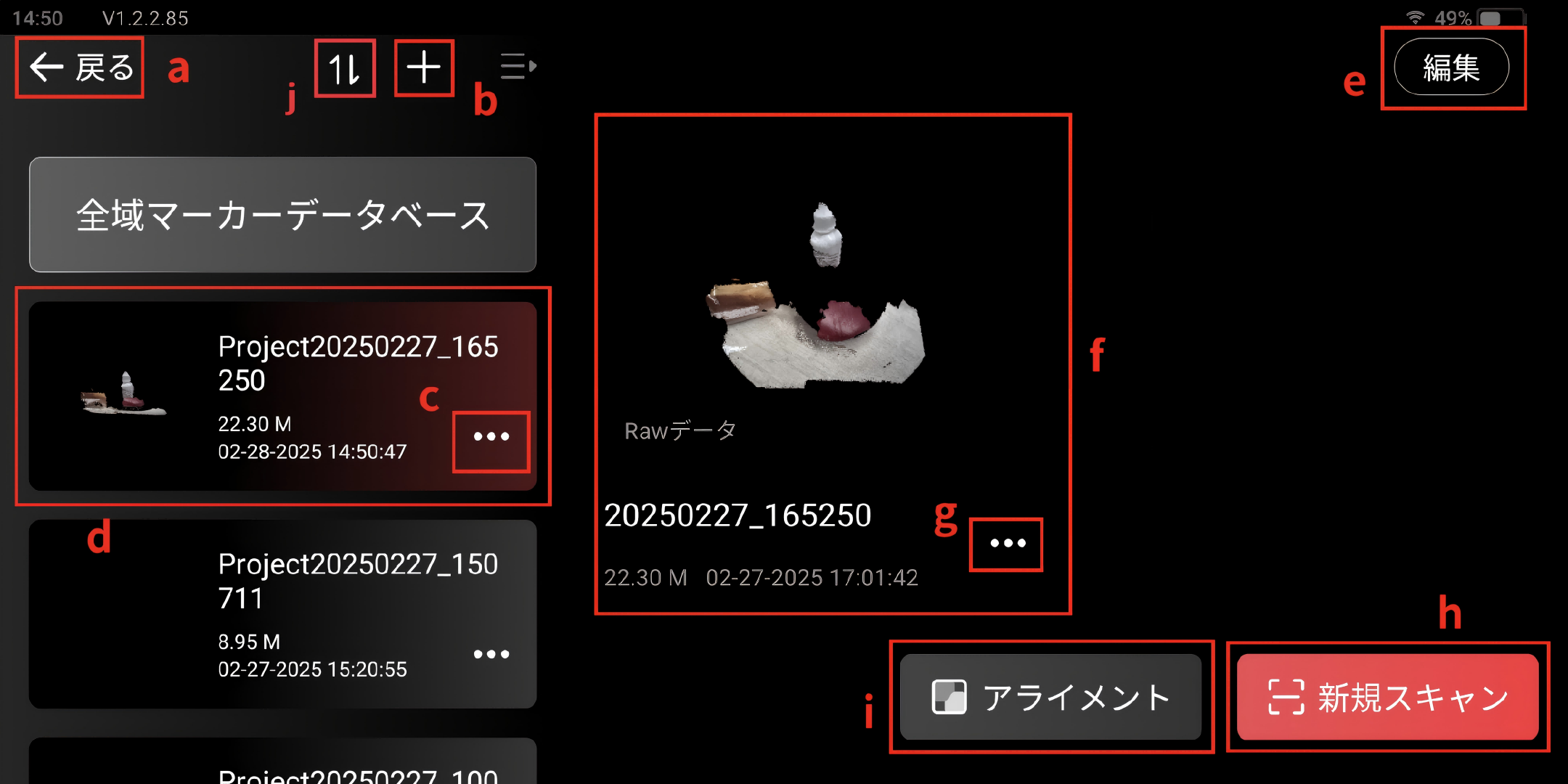
a. 戻る
タップすると、スキャン画面に戻ります。
b. 新規プロジェクト
タップすると、新しいプロジェクトを作成します。
c. プロジェクト管理
タップすると、プロジェクトの共有・名前変更・削除を行います。
d. プロジェクトサムネイル
タップすると、プロジェクト内のすべてのモデルを表示します。
e. 編集
タップすると、プロジェクト内の複数のモデルを選択し、一括編集を行います。
f. モデル表示エリア
選択したプロジェクト内のすべてのスキャンモデルを表示します。
g. モデル管理
タップすると、スキャンの再開・名前変更・モデルの削除を行います。
h. 新規スキャン
タップすると、プロジェクト内に新しいモデルを作成します。
i. アラインメント
タップすると、プロジェクト内のモデルを合成します。詳細は、10.2.3 節をご参照ください。
j. テンプレートライブラリの並べ替え
タップしてプロジェクトリストを並べ替えます。
¶ 7.2 点群スキャン

7.2.1 精度
① 高精度: このモードは、表面構造が複雑な物体に適しています。精度が高いですが、後処理に時間がかかります。
② 標準精度: 表面構造が単純な物体に適しています。このモードでは、処理速度がより速くなります。
③ 高速: 大型物体や人物をより速いスキャンスピードでキャプチャするために使用されます。フレームレートが速く、切り替えがよりスムーズになります。
7.2.2 トラッキング方式
① 特徴: 形状が独特で特徴がはっきりした物体(例: 彫刻、人物など)をスキャンするために使用します。繰り返しパターンがない物体に適しています。
② マーカー: 大きな滑らかなエリアや繰り返しパターンがある平面(例: タブレット)や、対称的な物体(例: ボウル)をスキャンするために使用します。物体の表面または周囲にマーカーを配置する必要があります。
③ 全域マーカー: 詳細は本章の 7.4 節をご参照ください。
7.2.3 スキャン対象物の種類

① 一般:日常生活で見られる、幾何学的特徴がはっきりした物体のスキャンに使用します。スキャン対象物が以下のカテゴリーに該当しない場合は、このモードを使用してください。
② 黒い:黒色や表面が暗い物体(例: 黒色または濃い灰色の衣服、靴など)のスキャンに使用します。黒色の皮革や一部の深黒色物体、または金属類・高反射物体の表面は光を吸収または反射する可能性があるため、事前に表面処理剤を使用して処理する必要があります。
③ 人体:高速モードを使用して人体をスキャンします。
④ 大型物体:高速モードを使用して大型物体をスキャンします。
⑤ カラー:カラースキャンを有効にして、物体の表面色をキャプチャします。メッシュ化後、RGB カメラで取得した色データを使用して 3D モデルにテクスチャマッピングを適用できます。カラースキャンを無効にした場合、スキャンされたモデルには色データが含まれず、形状データのみがキャプチャされます。
¶ 7.3 フォトグラメトリースキャン
詳細は第9章「フォトグラメトリーモード」をご参照ください。
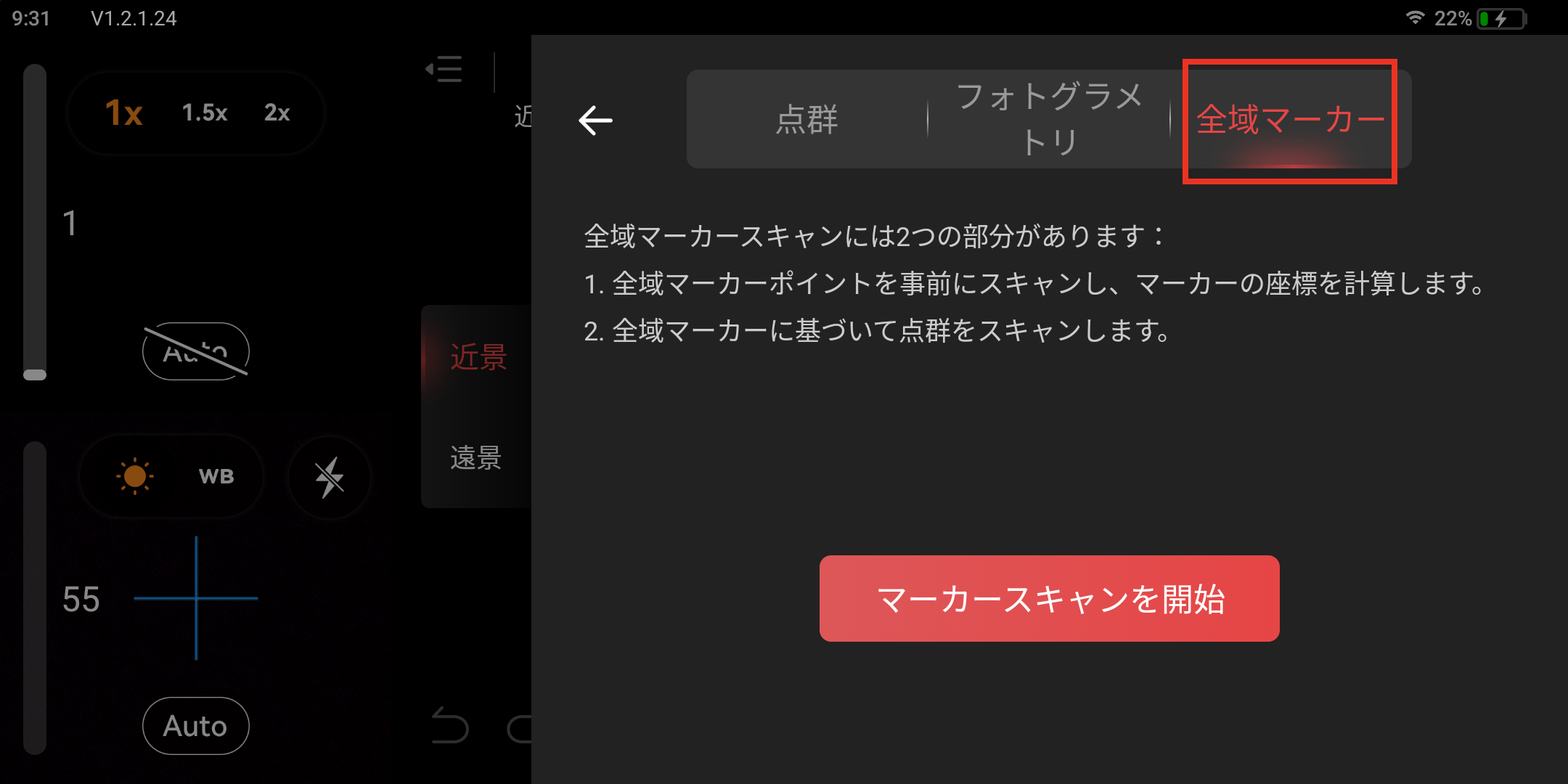
¶ 7.4全域マーカースキャン
全域マーカースキャン:自動車やソファなど、幾何学的特徴がはっきりしない大型物体をスキャンする際に、より正確な結果を提供します。
7.4.1 スキャン手順
手順 1: 物体の表面にマーカーを不規則に貼り付けます。
手順 2: MIRACO Plus を起動し、設定で[全域マーカー]を選択します。
手順 3: [マーカースキャンを開始]をタップし、マーカーをキャプチャして全域マーカーの座標を計算します。
手順 4: スキャン設定で[全域マーカー]を選択します。次に、キャプチャ済みの全域マーカー座標のファィルをタップします。

手順 5: 使用する全域マーカーを選択します。

7.4.2 全域マーカー座標エクスポート
詳細については、第11章の第2部分をご参照ください。
¶ 8.物体処理
スキャンでは、物体の材質や種類に応じて、適切なスキャン設定や操作方法、補助ツールを使用する必要があります。
| オブジェクトの種類 | 解決方法 |
| 黒色または暗い表面のオブジェクト |
オブジェクト表面にスキャン用スプレーで 処理する必要があります。 |
| 光沢のあるオブジェクト | |
| 金属またはメッキ表面のオブジェクト | |
| 光沢のある金属オブジェクト | |
| 透明オブジェクト | |
| 幾何学的特徴が明確でないオブジェクト | 物体の表面または周囲にマーカーを貼り付けるか、 マジックマットを使用してください。 |
| スキャンスプレーは Revopoint オンラインストアで購入できます。 | |
¶ 9. フォトグラメトリーモード
MIRACO Plus のフォトグラメトリー機能は、自動車、船舶、航空機部品、機械などの大型物体の高精度な 3D モデルを作成できます。フォトグラメトリーの距離精度は、0.02 mm + 0.05 × L(メートル)に達します。
¶ 9.1 フォトグラメトリ計測キット

フォトグラメトリ計測キットには、ツールボックスが付属しており、以下の内容物が含まれています:
高精度磁着式スケールバー(4 本)
コーデッドターゲット(粘着式 x208、磁着式 x208)
マーカー(500 個)
詳細な使い方は、以下のリンクから動画をご覧ください。
¶ 9.2 ご使用の前
①フォトグラメトリ計測キットはMIRACO Plus 3Dスキヤナーと件せて使用する必要があります。
ご注意 :Revo Scan 5(PC)のパージョン 5.4.12 以降をご利用ください。
② スケールバーは工場で専門的に校正されています。精度に影響を与える可能性がありますので、ぶつけたりしないでください。
③ コーデッドターゲット番号の重複を避けるため、同じキットの磁着式コーデッドターゲットと粘着式コーデッドターゲットを混ぜないでください。また、異なるキットのコーデッドターゲットを混ぜないでください。
④ コーデッドターグットは、対象物の表面を完全にカバーするためにマーカーと一緒に使用することができます。
⑤ 精度エラーを避けるため、計測対象物や撮影シーンの表面は硬くて、計測プロセス中に変形したり移動したりしないようにしてください。
⑥ キットの磁着式アクセサリーは、スチール、鉄、ステンレスなど、強い磁性を持つ表面に適しています。
¶ 9.3 使用方法
ステップ1:
コーデッドターゲットとマーカーを貼り付けます。
コーデッドターゲットとマーカーを対象物の表面または周囲にランダムに貼り付けます。その際、物体の特徴が豐富な部分は避けるようにしてください。
例:対象物から 1 m の距離で撮影する場合、コーデッドターゲット間の距離は約 20 cm、マーカー間の距離は約 10 cm とします。
注意事項:フォトグラメトリと点群スキャンをスムースに行うため、以下のガイドラインに従ってコーデッドターダットとマーカーを貼り付けてください。
- フォトグラメトリの際、1 つのフレームに少なくとも 8 つのコーデッドターゲットが見えるようにしてください。
- 点群スキャンの際、1 つのフレームに少なくとも 5 つのマーカーが見えるようにしてください。
- 撮影する時には、スケールバー、コーデッドターゲット、マーカーを動かさないでください。
- 点群スキヤン中にスケールバーを取り外すことはできますが、コーデッドターゲットとマーカーの位置は変更しないでください。
- 撮影は屋内で行ってください。周囲の光が均一で柔らかいことを確認し、自然光の下で撮影することをお勸めします。
- 撮影する環境を整理し、不要なものが写り込まないようにしてください。
- 対象物は静止した状態を保ち、表面にハイライトや影がないようにしてください。
- 撮影パスの計画:
- 各エリアは上下左右、また中央の最低 5 方向から撮影してください。まず中央部分を撮影し、MIRACO Plus スキャナーを被写体の表面に対して垂直に構えてください。次に、中央点の周囲の四つのエリアをキャプチャするため、側面と上部のエリアを撮影する際はスキャナーを≤45°程度に傾けてください(下図参照)。
- 適切な距離で撮影してください。写真の品質が基準に満たない場合は、画面の指示に従ってください。
- 撮影中、少なくとも 8 つのコーデッドターゲットが 1 つのフレームに表示されていることを確認してください。
- 必要な写真の総数は、対象物のサイスやシーンの複雑さによって異なります。少なくとも 30 枚の写真を撮影してください。大きな対象物や複雑なシーンでは、より多くの写真が必要です。
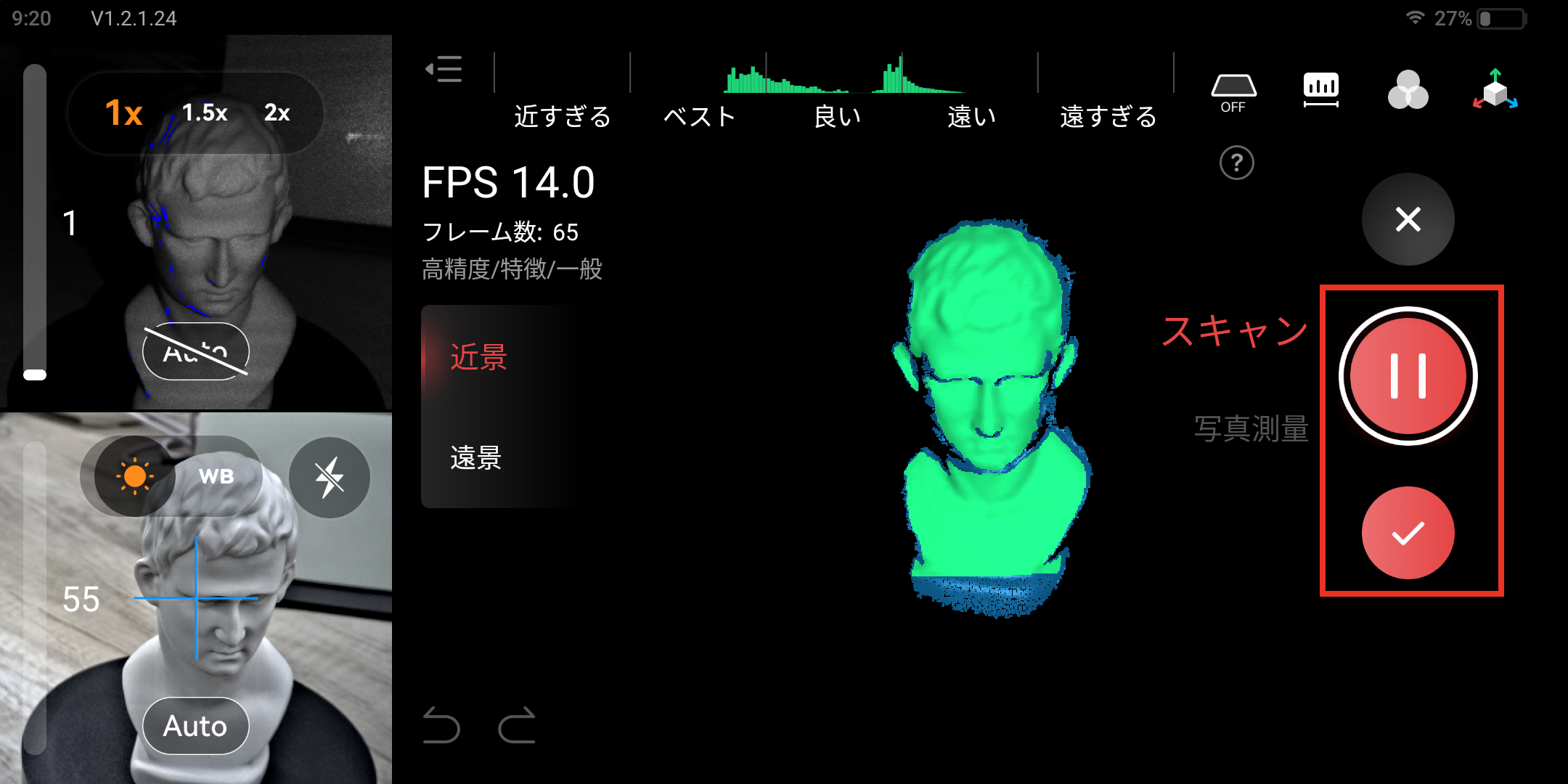
- メインメッシュから切り離された孤立したメッシュデータを検出し、削除します。(例:人物の頭部をスキャンする際の肩の上部)
- 孤立率を高く設定するほど、より多くの孤立メッシュデータが検出されます。
- 方法:
- 方法:

ステップ2:スケールバーの配置
• スケールパーを対象物の表面または周囲に配置します。スケールパーは互いに平行にではなく、角度をつけて配置してください。
• スケールバーはターゲットやマーカーがない空白の領域に配置し、両方を覆わないようにしてください。スケールバーは少なくとも 2 本必要です。

注意事項:
ステップ3:環境の確認
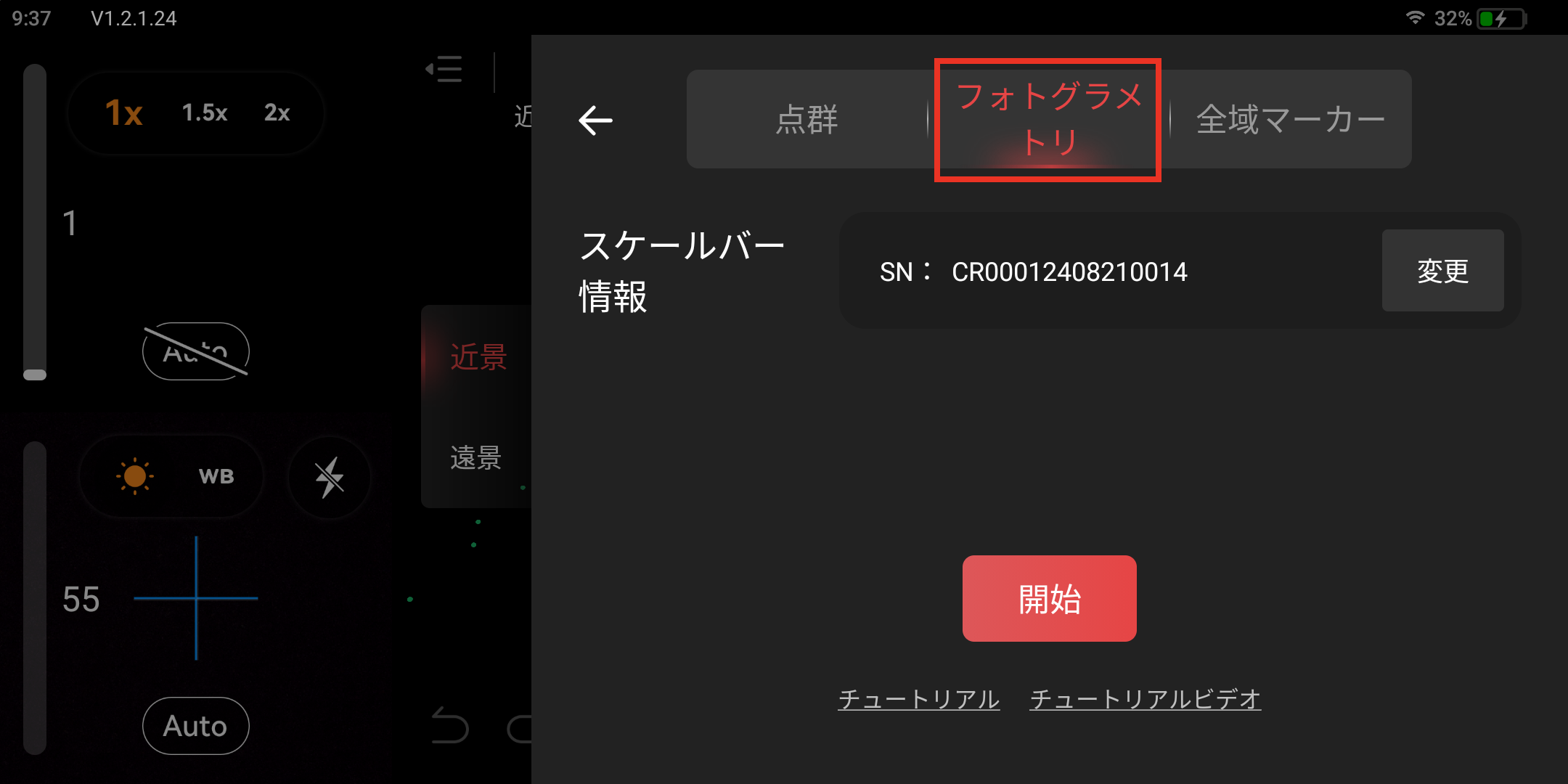
ステップ4:スケールバ一情報のインポート
フォトグラメトリ機能を使用する前に、まずスケールバーの情報をインポートします。初めて使うのでなければ、この操作をスキップすることができます。
[フォトグラメトリ]を選択し、次に[変更]をタップして、ツールボックス内のスケールバーの下にあるQR コードをスキャンして情報をインボートします。
インボート後、スケールバーのシリアル番号が表示されます。[開始]ボタンをタップします。
ステップ5:新規タスクの作成
新しいタスクを作成し、名前の変更して、[OK]をタップして撮影インターフェイスに入ります。
ステップ 6:撮影開始
コーデッドターゲットがはっきりと見えるまで、推薦距離の 0.8~1.3 m の範囲でスキヤナーを位置づけてください。開始ボタンをタップして撮影を開始します。スキャナーを安定させてください。
対象物全体の表面/シーンを複数の連続撮影エリアに分割します。2 枚の連続する写真の中で、コーデッドターゲットが最低でも 50%重なるようにしてください。撮影エリアが完全に対象物/シーンの表面全体をあらゆる角度から完全にカバーするようにします。
* 撮影パスの参考用です。できるだけ多くの写真を撮影してください。

注意事項:
ステップ7:マー力一の座標を計算
撮影が終了したら、マーカーの座標を計算します。計算後、キャプチャされたスケールバーのコーデッドターゲットを再構成した平均誤差が表示されます。計算が失敗した場合は、画面の指示に従って撮影追加するか、再撮影してください。
ご注意:撮影を追加または削除した場合は、再計算する必要があります。
計算が完了したら、全域マーカーのフアイルを保存し、Revo Scan 5(PC)にエクスポートして次の操作を行うか(詳しいエクスポートの方法は、第 11 章の第 2 部分をご参照ください。)以下の手順に従って、点群データのスキャンを続行してください。
ステップ8:点群のスキャン(オブション)
① スキャンボタンをタップして点群をキャプチャします。

② スキャナーをゆっくりと一定の速度で動かしてください。すべての点群が取り込まれたら、完了ボタンをタップします。
ご注意:フォトグラメトリ機能に基づく点群スキャンの流れはマーカースキヤンに似ています。マーカースキャンのチュートリアルをご参照ください。点群スキャン中、1 つのフレームに少なくとも 5 つのマーカーが表示されていることを確認します。
③ ボタンをタップして、後処理のインターフェイスに入り、モテルを編集したり、Revo Scan 5 (PC) に転送してより詳細な編集を行うことができます。
ステップ9:全域マーカーのエクスポート
詳細な設定方法については、第 11 章の第 2 部分をご参照ください。
¶ 10. モデル編集
¶ 10.1 編集インターフェース
スキャンが完了したら、 をクリックしてモデル編集画面に入ります。
をクリックしてモデル編集画面に入ります。
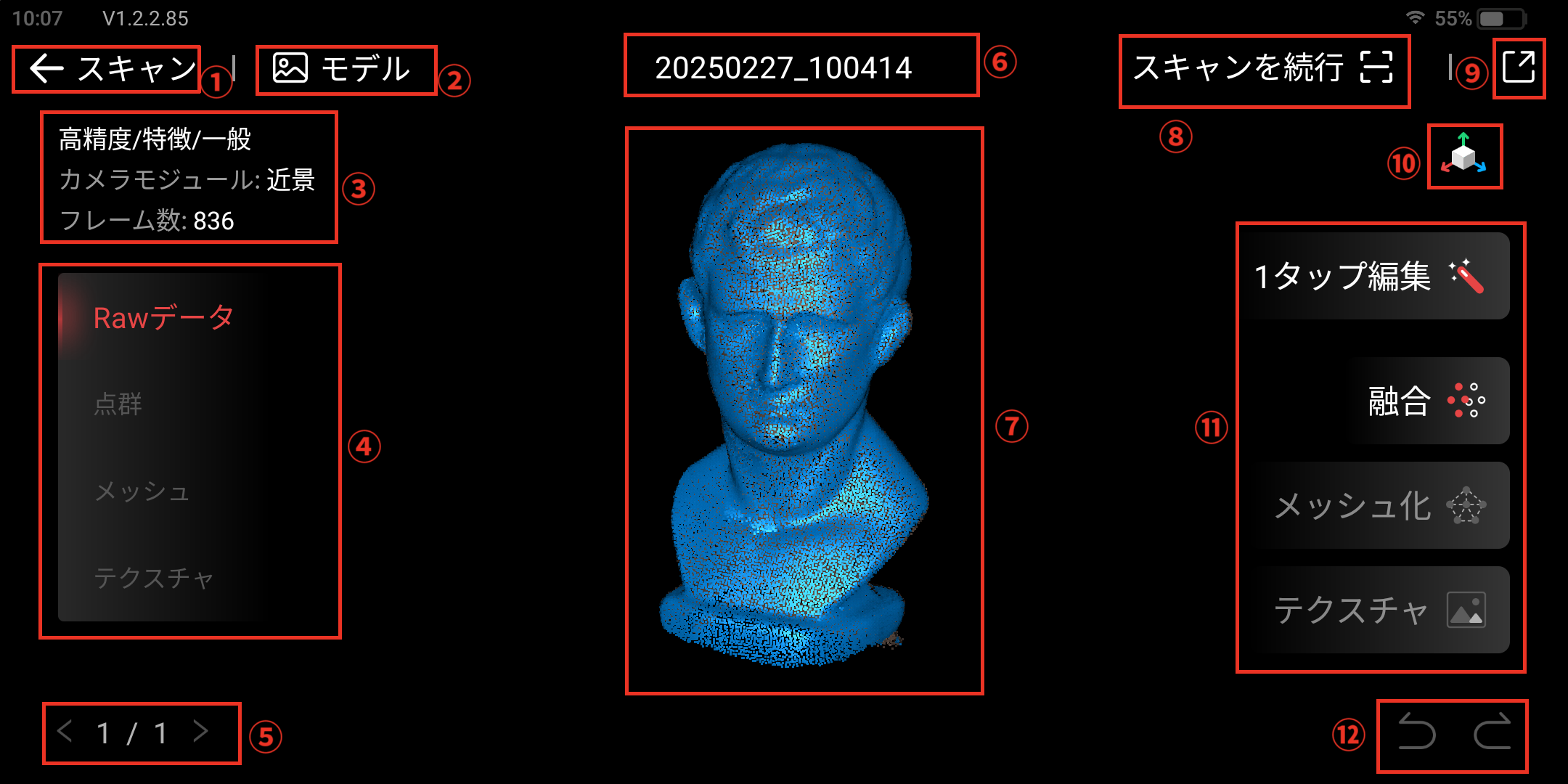
① スキャン:タップしてスキャン画面に戻ります。
② モデル:モデルライブラリに入ります。
③ スキャン詳細:スキャン設定、カメラモジュール、総フレーム数を表示します。
④ レンダリング:異なるモデル状態間を切り替え、点群、メッシュ、またはテクスチャ処理(カラースキャンが有効な場合のみ)後の状態を表示します。
⑤ モデル切り替え:プロジェクト内で異なるモデルを切り替えます。
⑥ モデル名:モデルの名前を表示します。
⑦ 3D 表示ウィンドウ:キャプチャしたデータとその各種状態を表示します。
⑧ スキャンを続行:タップしてモデルのスキャンを続行します。
⑨ 共有:ファイルを PC 端末、モバイル端末、または外部ストレージに共有します。
➉ 3D 座標:座標ボタンをタップすると、モデルが選択した面を中心に表示されます。
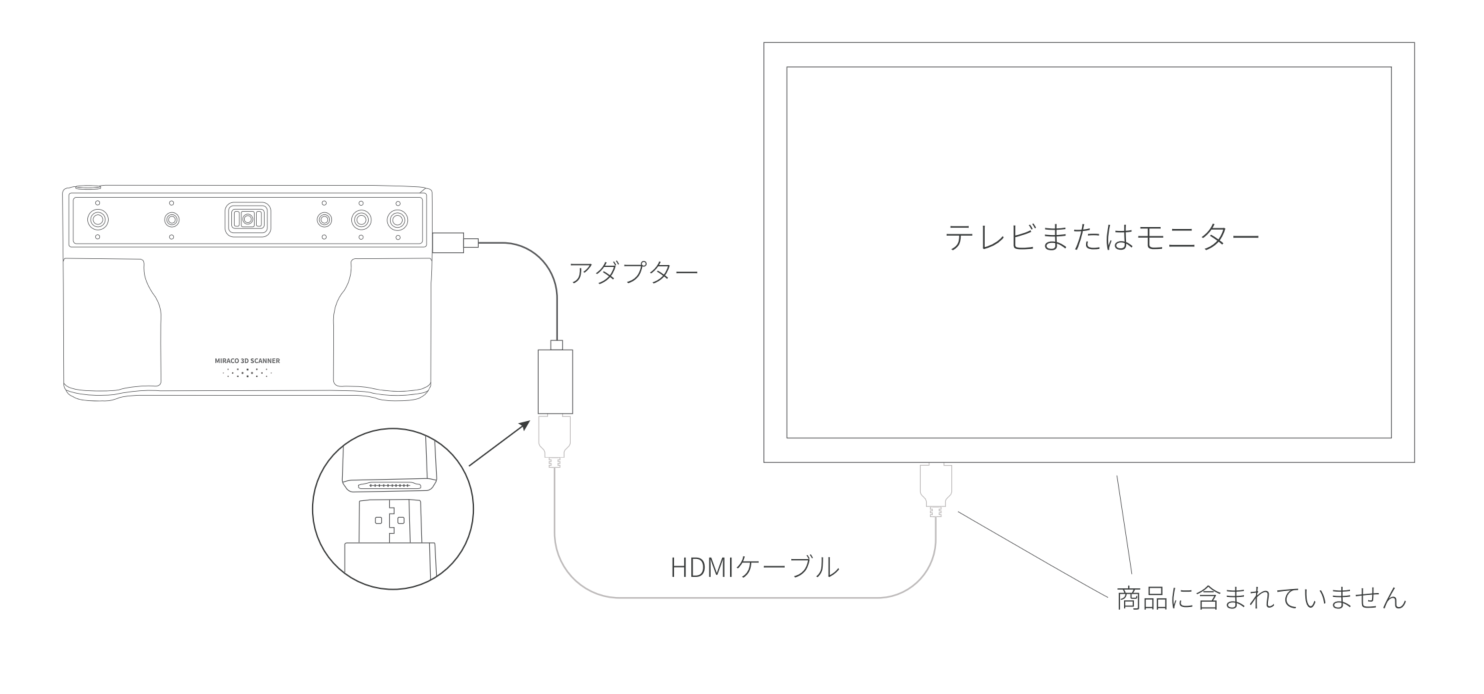
⑪ スキャン編集:スキャン完了後、ここで必要な処理を行います。初心者は 1 タップ編集を利用でき、経験豊富なユーザーはスキャン後に融合、メッシュ処理、テクスチャ処理を段階的に実行できます。
⑫ 元に戻す/やり直す:元に戻すまたはやり直すボタンをタップして、前の操作を取り消すまたは再実行します。
¶ 10.2 1 タップ編集と手動編集
10.2.1 1 タップ編集
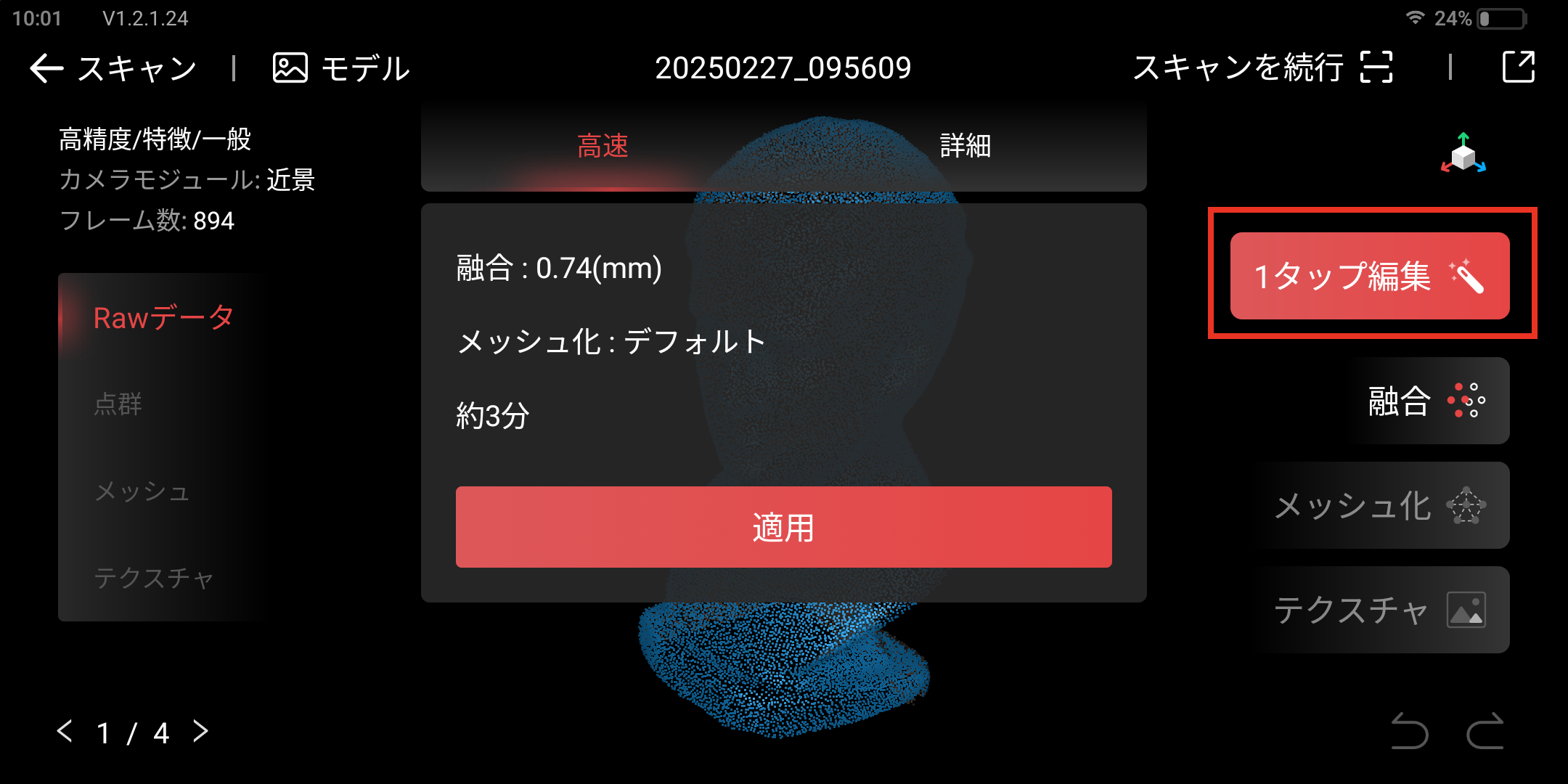
[1 タップ編集]をタップし、[高速]または[詳細]を選択してから、[適用]をタップします。システムは自動的に融合、メッシュ化、およびテクスチャ(カラースキャンが有効な場合のみ)を実行します。
① 高速:シンプルなモデルを作成し、スキャン結果を迅速に確認するのに役立ちます。
② 詳細:詳細なモデルを作成しますが、処理時間が長くなります。スキャンの初心者には、1 タップ編集機能の使用をお勧めします。
10.2.2 手動編集
精密な編集を行うことで、3D モデルの最終的な品質を向上させることができます。順番に[融合]、[メッシュ化]、[テクスチャ]をタップし、対応するパラメータを調整してスキャンデータを処理してください。
① 融合

複数の点群データセットを 1 つの点群データセットに結合することを指します。
スタンダード:処理時間が短く、大量のデータスキャンや複数のフレームのデータに適しています。
アドバンス:高品質な点群を生成しますが、処理時間が長く、表面が不規則または高詳細が要求されるモデルに適しています。
② 点間距離
点群における隣接する点間の距離を指します。
点間距離が小さいほど結果は詳細になりますが、処理時間が長くなります。
ご注意:アドバンスの最小点間距離はスタンダードよりも大きいですが、アドバンスで使用されるアルゴリズムはより優れており、生成されるモデルはより詳細になります。融合後、アイソレーション、オーバーラップ検出、およびスムーズ機能を使用してモデルの品質を改善できます。
③ アイソレーション
アイソレーションを使用して、メインの点群モデルから切り離された孤立した点群データを検出し、削除します。
孤立率: 点群の総点数に対する孤立した点群の点数の割合です。孤立率を高く設定すると、より多くの孤立した点群が検出されます。
④ オーバーラップ検出
オーバーラップ検出は、より正確かつ一貫性のあるモデルを得るために、点群間の重複を検出し、除去します。この機能は繰り返し使用可能です。
モデル内の 2 点間の距離が設定されたオーバーラップ距離よりも小さい場合、それらの点はオーバーラップと見なされます。オーバーラップ距離を大きく設定すると、より多くのオーバーラップが検出されます。
⑤ スムーズ
点群内のノイズを除去し、より滑らかにするために使用します。スムーズの強度を高く設定すると、点群はより滑らかになりますが、より多くのディテールが失われる可能性があります。
回数は、スムーズ処理を適用する回数を指します。
⑥ メッシュ化
メッシュ化は、点群データをメッシュモデルに変換するプロセスです。
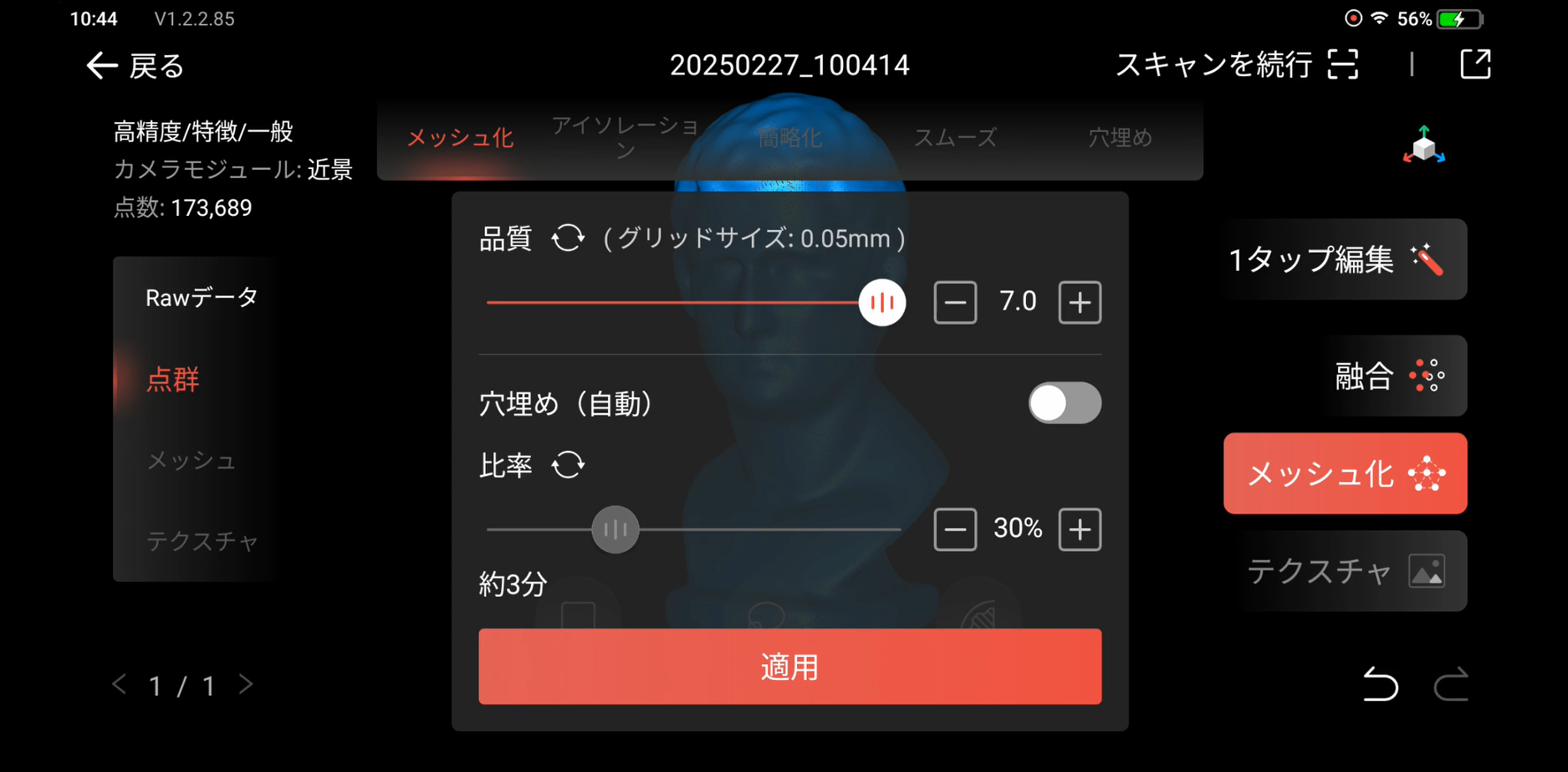
品質: 品質設定は、生成されるメッシュモデルの詳細度と密度を決定します。品質パラメータを高く設定すると、メッシュはより密で詳細になりますが、処理時間も長くなります。
穴埋め(自動): モデル内の欠損や穴を修復または埋めます。埋める穴のサイズは設定された比率に依存します。比率を大きく設定すると、より大きな穴が埋められます。
アイソレーション、簡略化、およびスムーズ機能を適用して、メッシュの品質を向上させることもできます。
⑦ アイソレーション
⑧ 簡略化
簡略化することで、メッシュの複雑さを減らすことができます。ファイルサイズを縮小でき、ノイズも削減されます。後処理の効率が向上し、計算やレンダリング時間が短縮され、モデルの編集性も高まります。
比率を低く設定すると、より多くのディテールが保持されます。比率を高く設定すると、より多くのディテールが削除され、ファイルサイズが小さくなります。
⑨ スムーズ
平面または曲面のエリアをスムーズにすることができ、必要に応じて複数回適用または取り消すことができます。
スムーズする強度を選択し、適用回数を設定します。過度なスムージングはディテールを失う可能性があります。
➉ テクスチャ
RGB カメラでキャプチャした色データをメッシュに適用し、リアルな 3D モデルを生成します。
スキャン設定でカラースキャンを有効にしている場合にのみ、テクスチャ機能を使用できます。
⑪ 長方形選択(テクスチャ後は使用不可)
長方形を描画して、モデルの複数の部分を選択します。
⑫ なげなわ選択(テクスチャ後は使用不可)
これは自由形式の選択ツールで、対象物の周りに閉じた図形を描画して使用します。現在の位置と開始位置を線で結ぶことで、選択を完了します。
⑬ 連結成分
画像処理において、同じ属性を持ち、互いに接続されている画素の集合を「連結成分」と呼びます。任意のエリアをクリックすると、このツールによってモデル上でそのエリアに接続されている領域が識別され、自動的に選択されます。
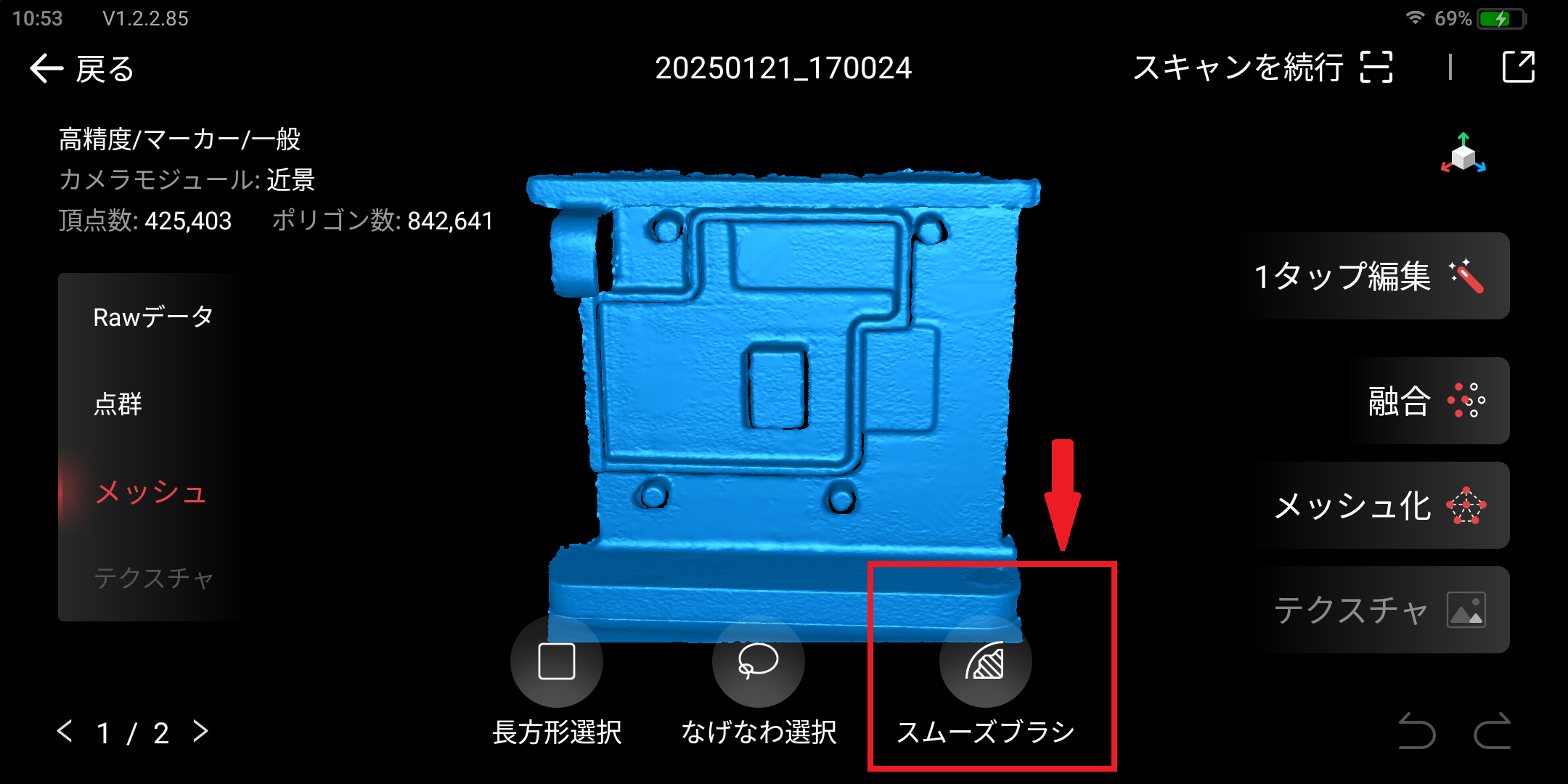
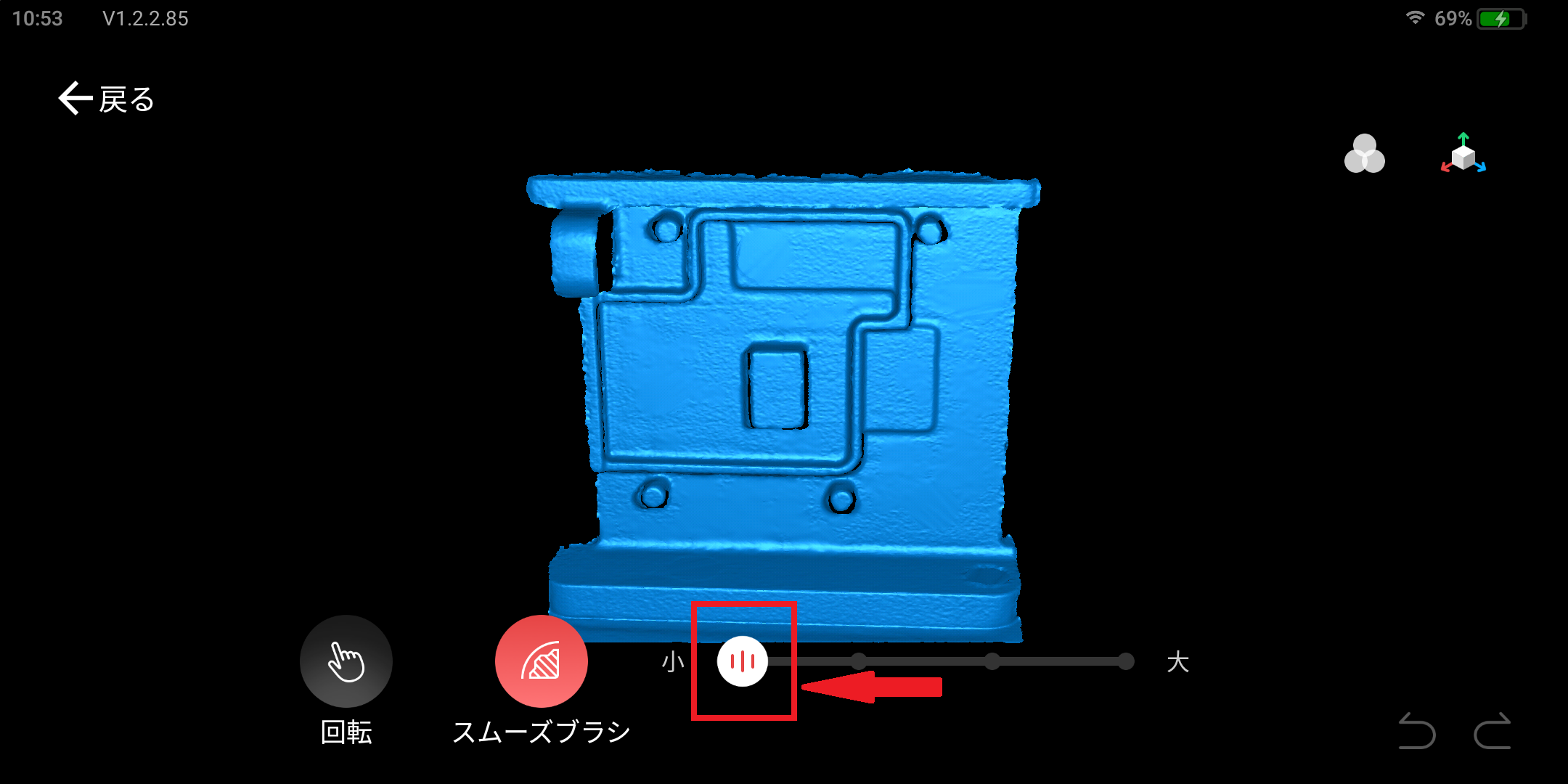
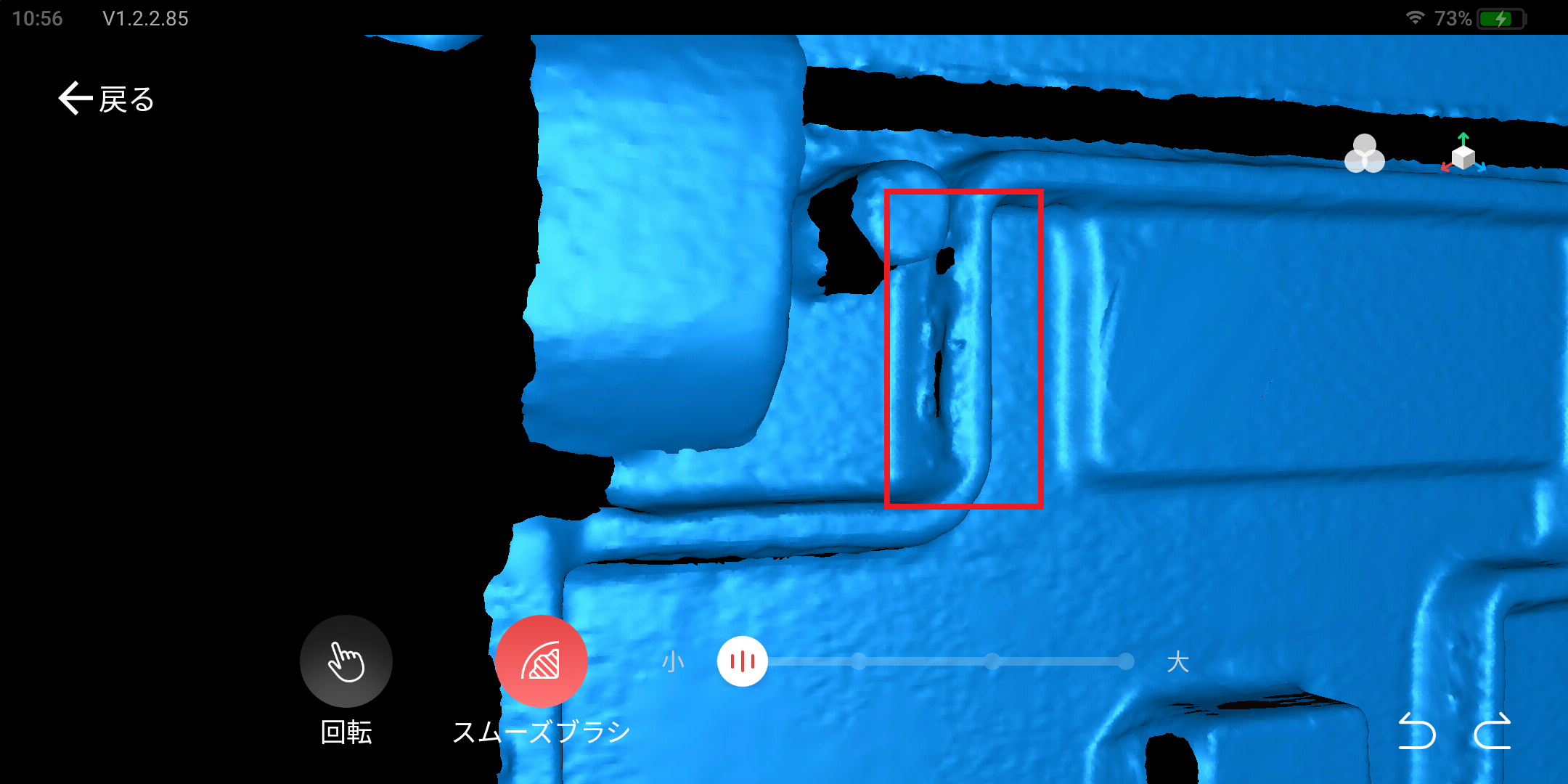
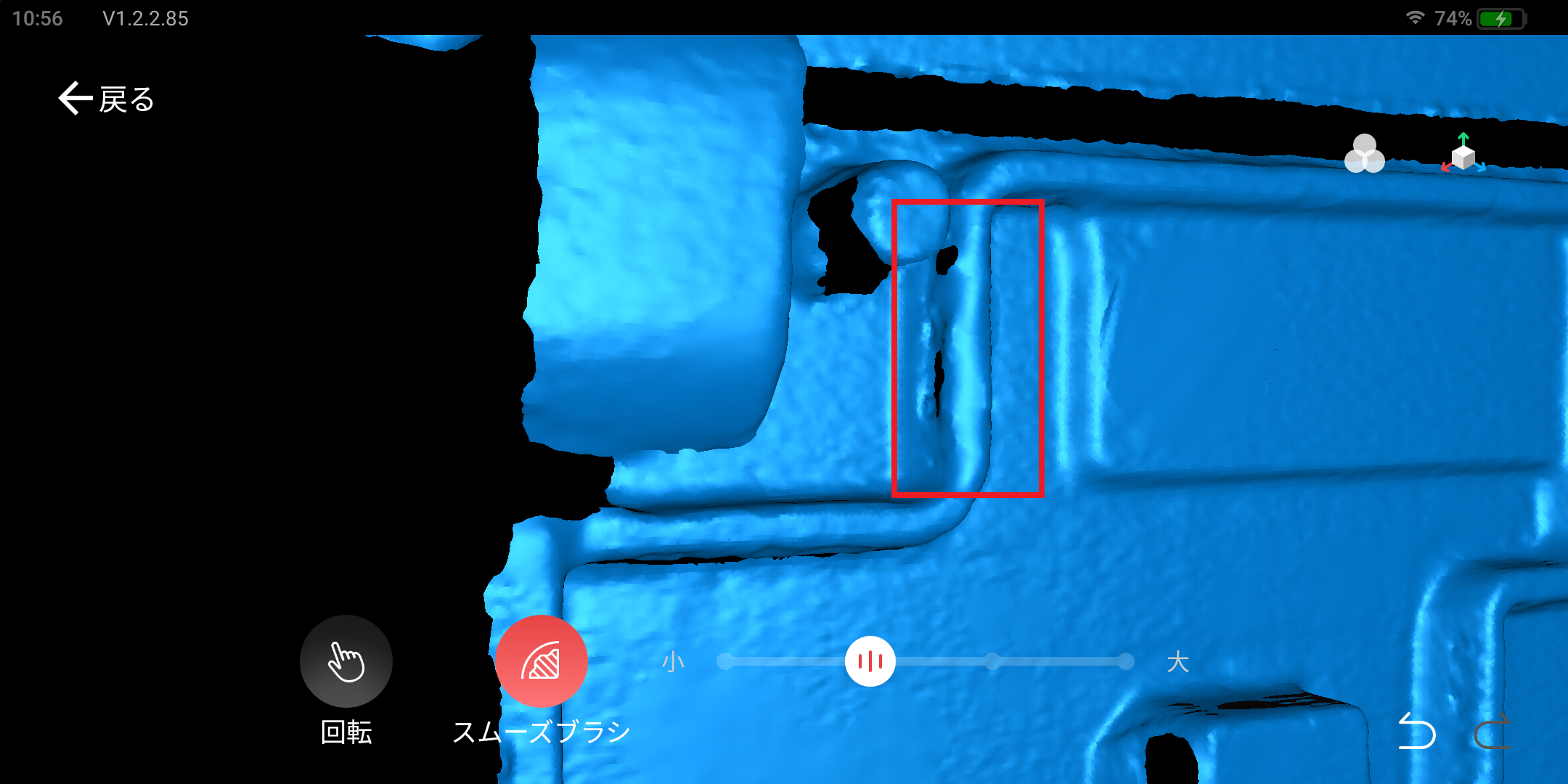
⑭ スムーズブラシ
画面下部のスライダーをドラッグしてブラシサイズを調整し、モデルの表面をタップして局所的なエリアを平滑化します。
⑮ 穴埋め

モデル表面のすべての穴を検出します。長方形選択ツールまたはなげなわ選択ツールを使用してこれらの穴を選択し、平面または曲面で埋めることができます。
¶ 10.3 アラインメント
プロジェクト内の複数のスキャンデータを新しいオブジェクトにアラインメントすることができます。
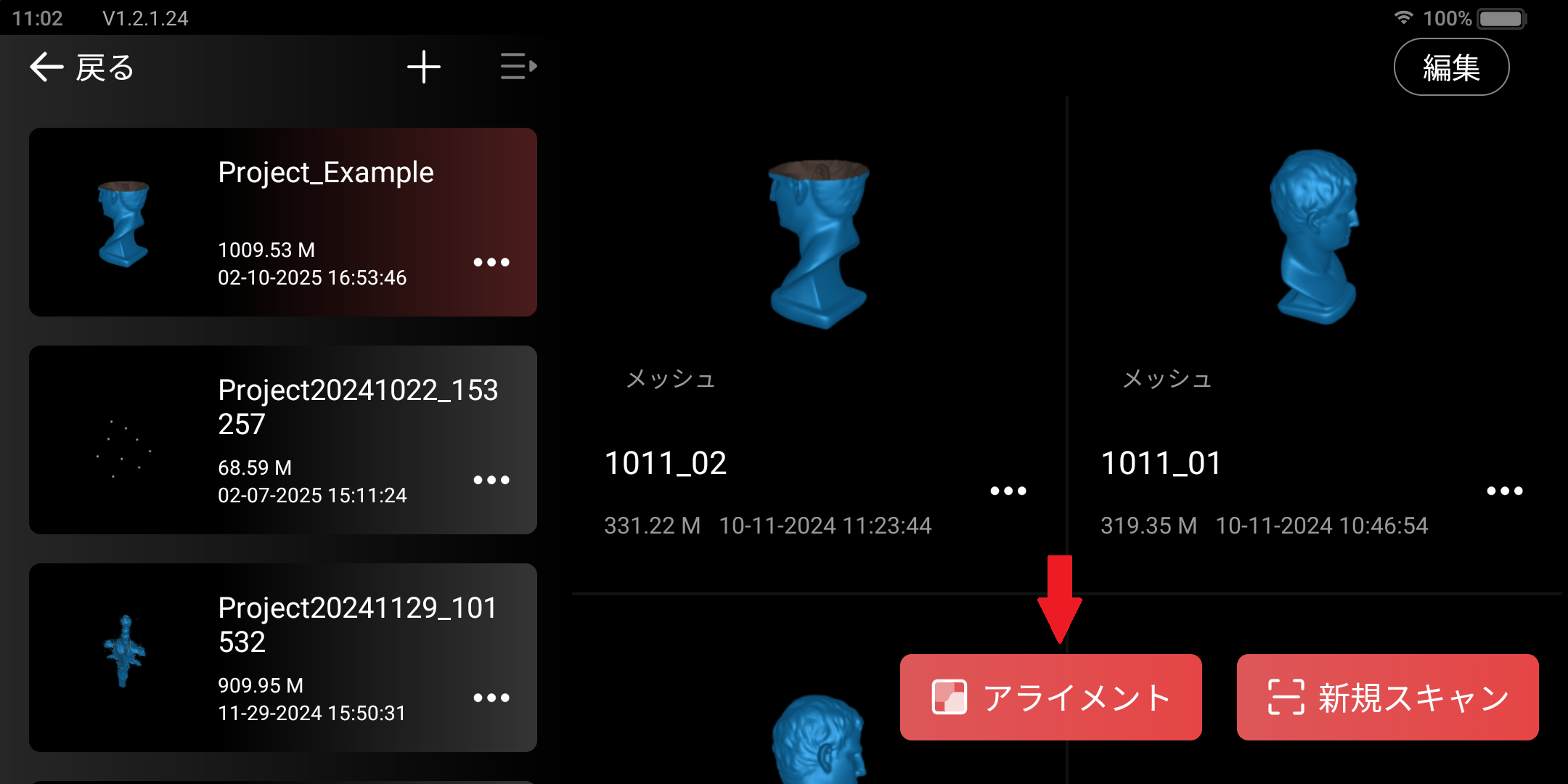
ステップ1: 合成するモデルを選択します。2 つのモデル間の重なりは 10%以上である必要があります(最適な結果を得るためには、40%~50%の重なりを推奨します)。
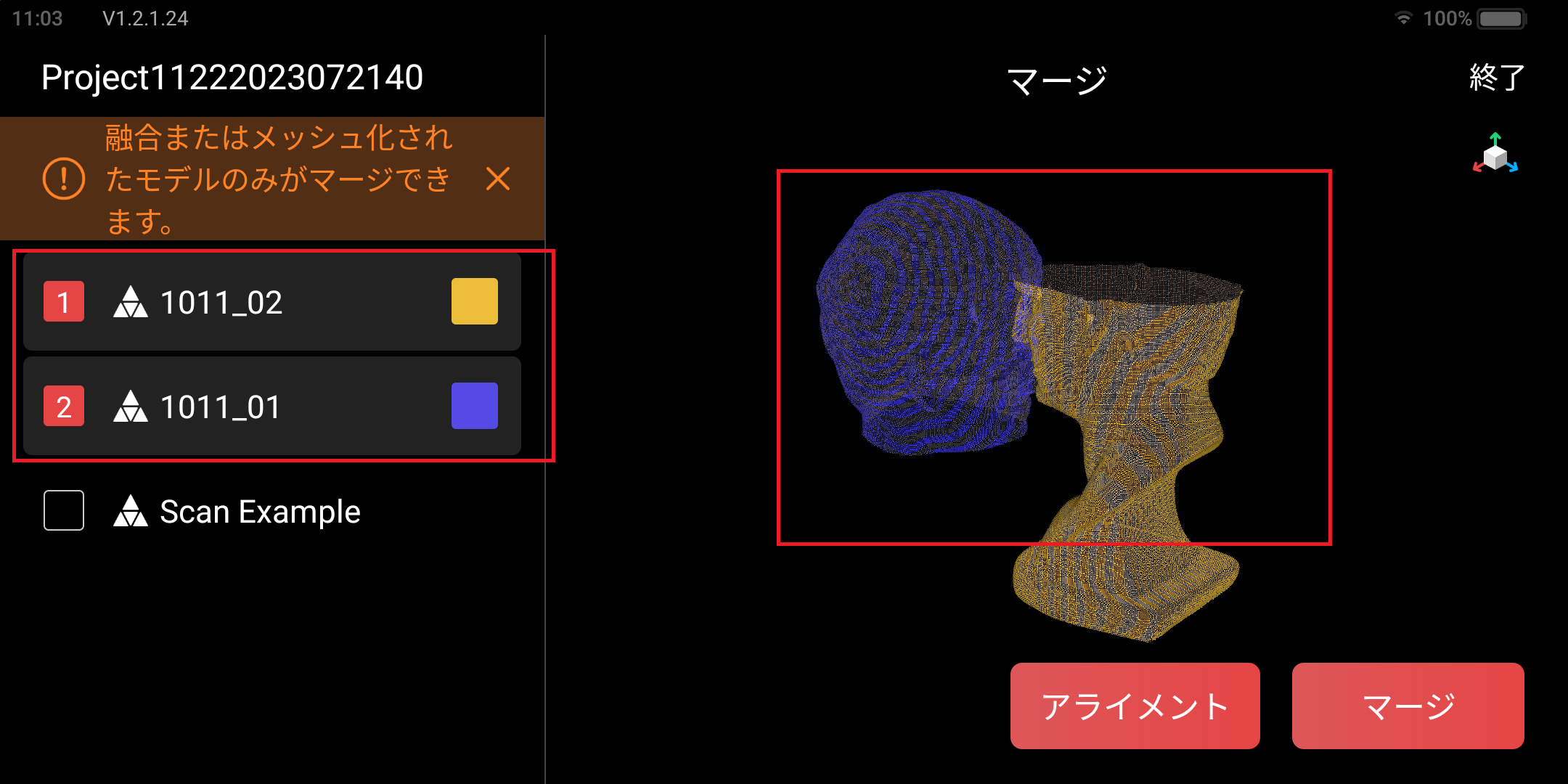
ステップ2:[アラインメント]をタップし、モデルの合成状態をプレビューします。
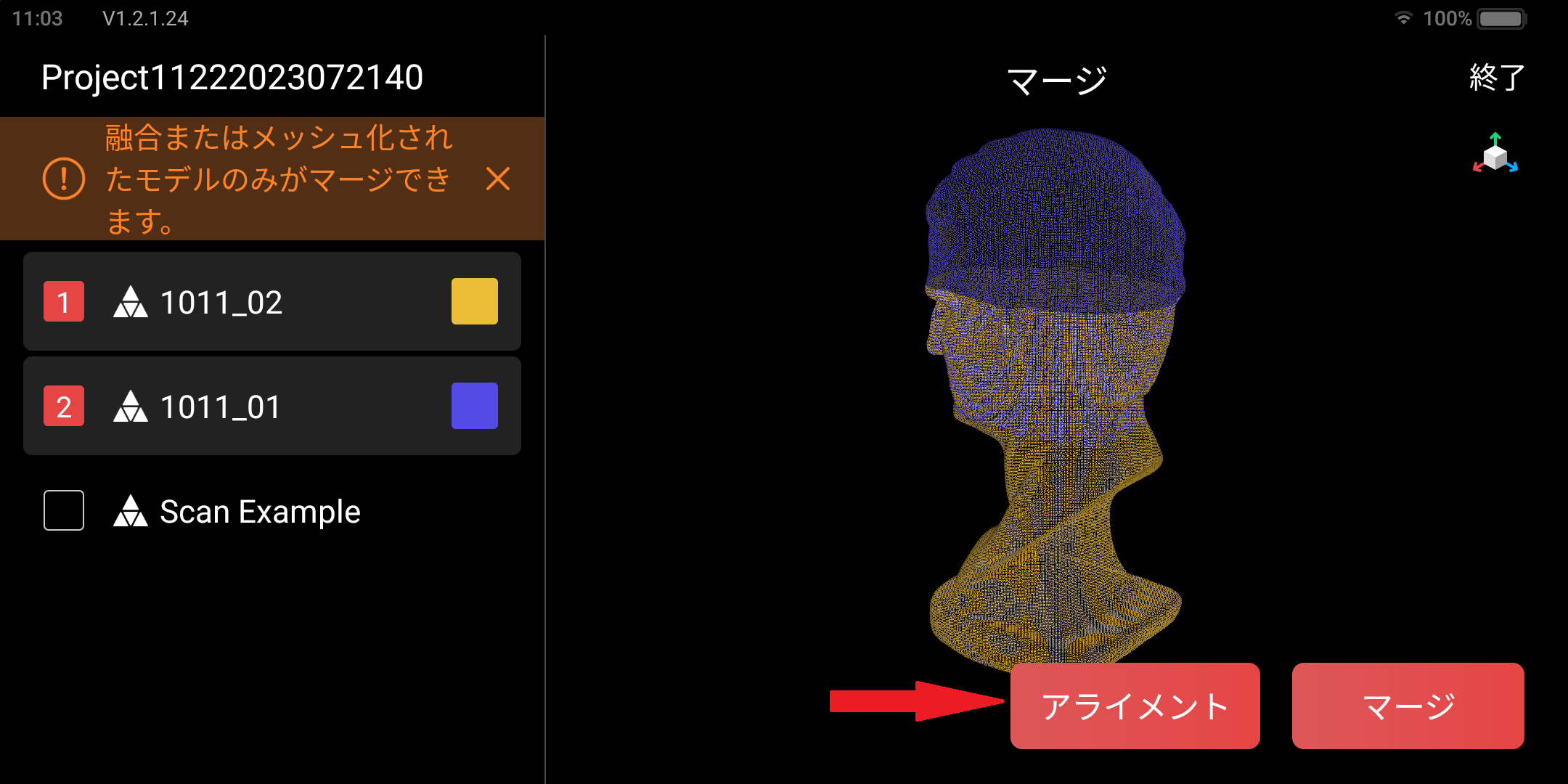
ステップ 3:[マージ]をクリックして、合成後のモデルを生成します。
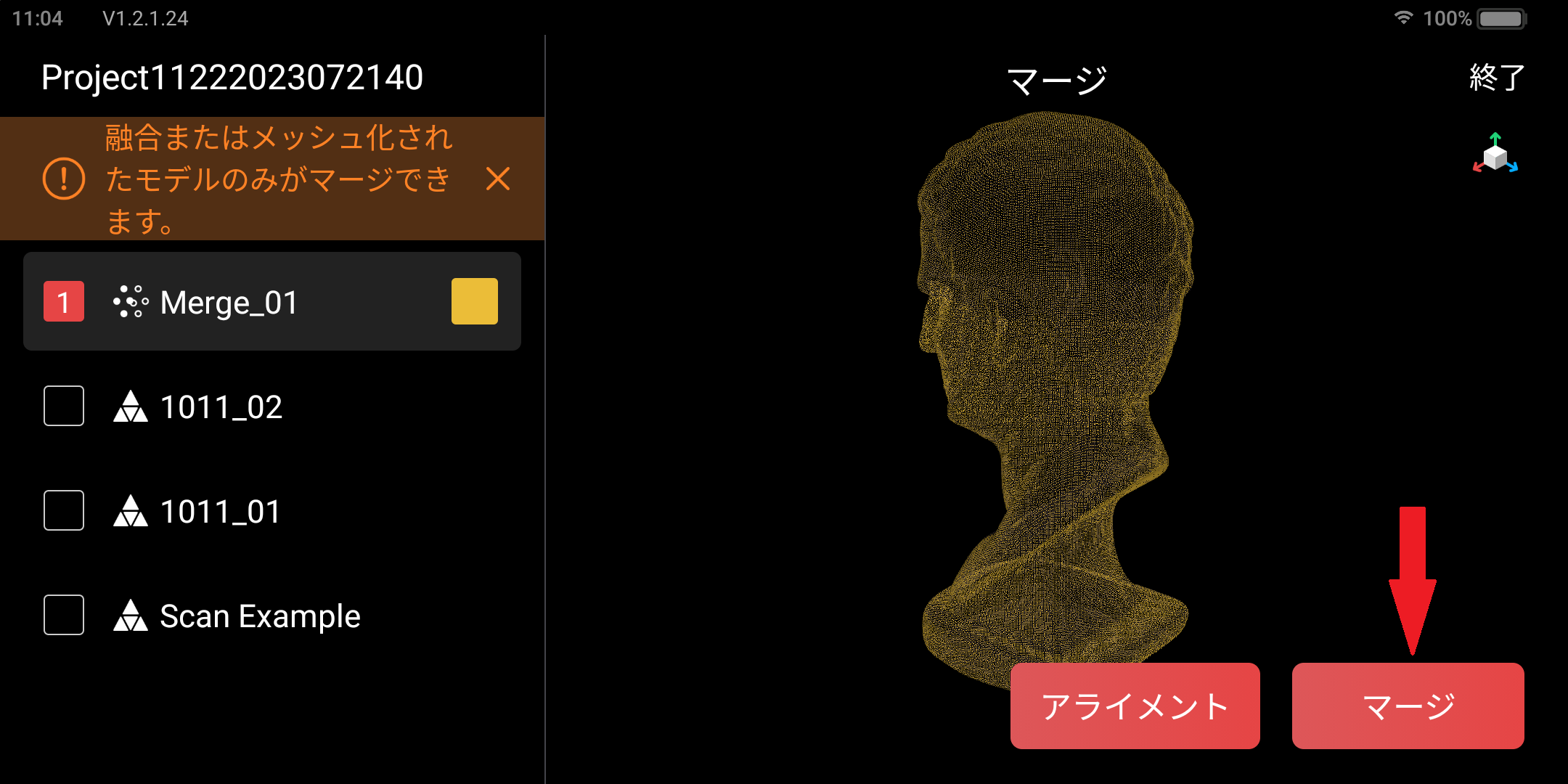
ご注意:MIRACO Plus は特徴アラインメントのみをサポートしています。その他のアラインメント方法は、モデルをRevo Scan(PC)にエクスポートすることでさらに操作できます。
¶ 11.データ転送と共有
MIRACO Plusは、USB転送、Wi-Fi転送、外部ストレージの3種類のデータ転送方式をサポートしています。
¶ 11.1 モデルのエクスポート
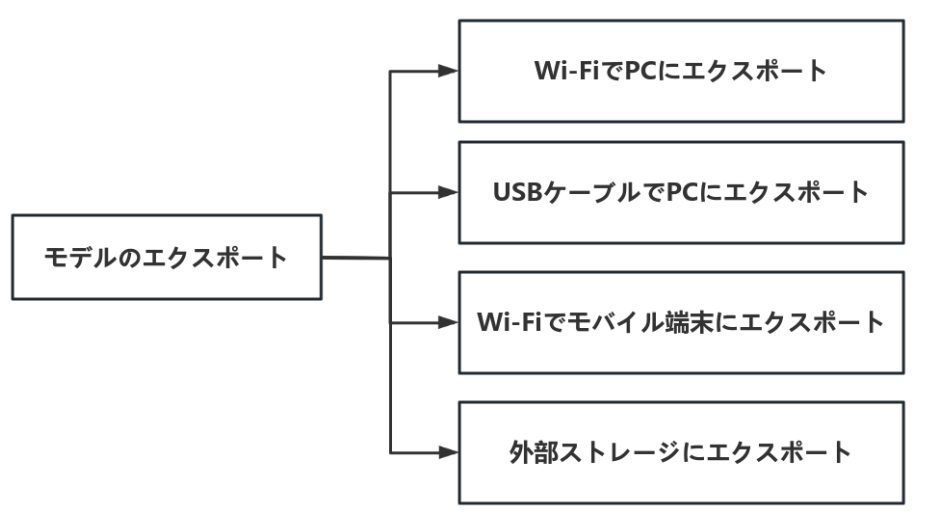
方法 1:Wi-Fi で PC にエクスポート
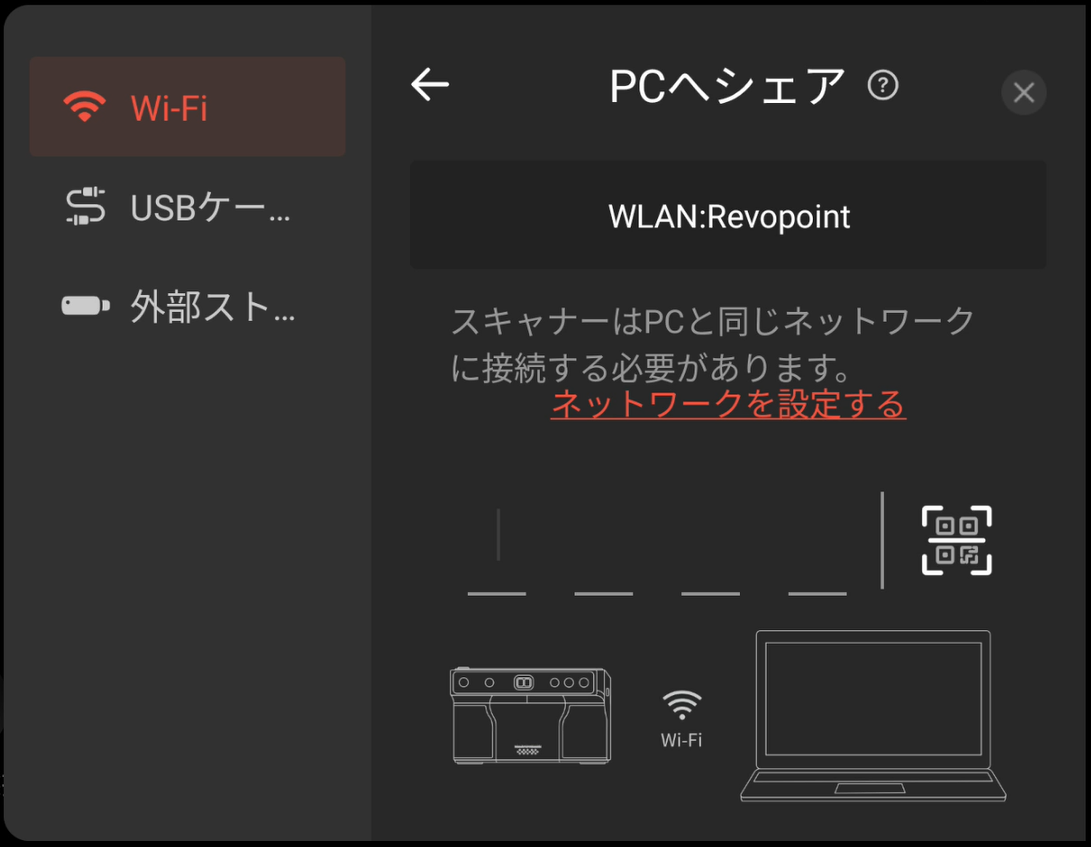
手順 1:MIRACO Plus と PC が同じ Wi-Fi ネットワークに接続されていることを確認してください。
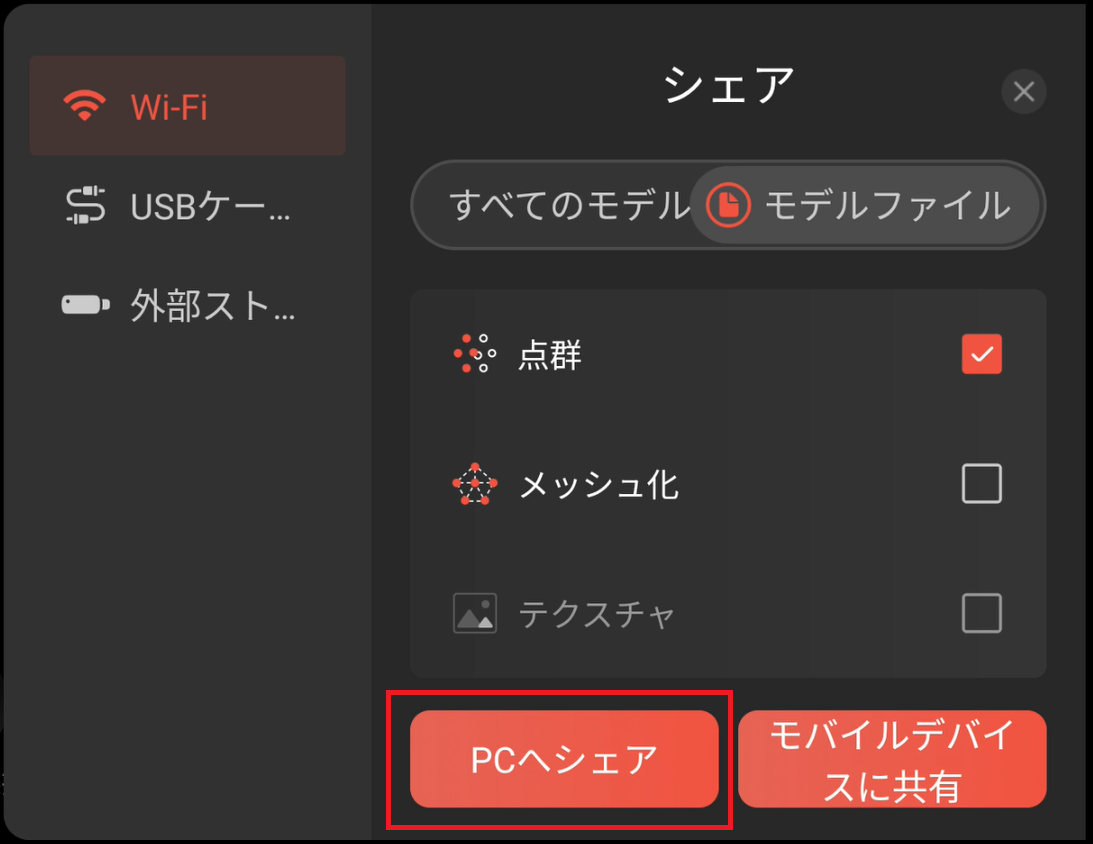
手順 2:共有アイコンをタップし、[PC に共有]を選択します。

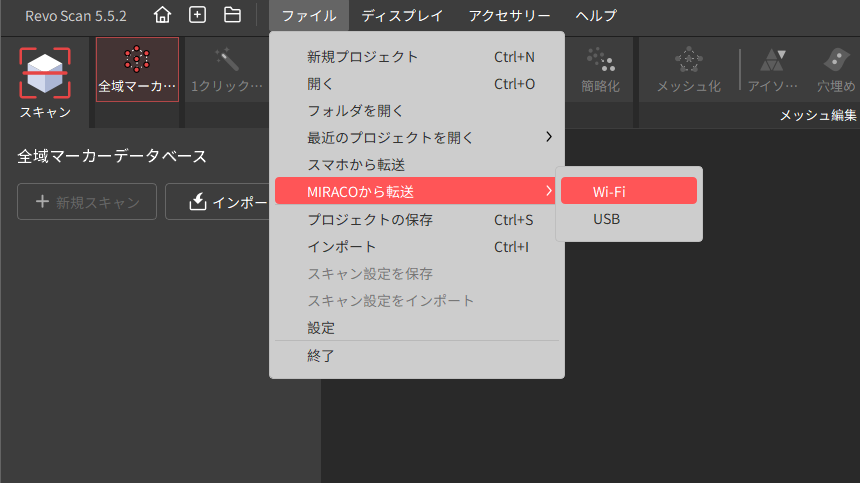
手順 3:Revo Scan(PC)で、[ファイル] > [MIRACO から転送] > [Wi-Fi]をクリックします。
手順 4: MIRACO Plus のポップアップウィンドウに、PC 側に表示された認証コードを入力するか、MIRACO Plus で QR コードをスキャンすると、プロジェクトを PC に共有できます。
方法 2:USB ケーブルで PC にエクスポート
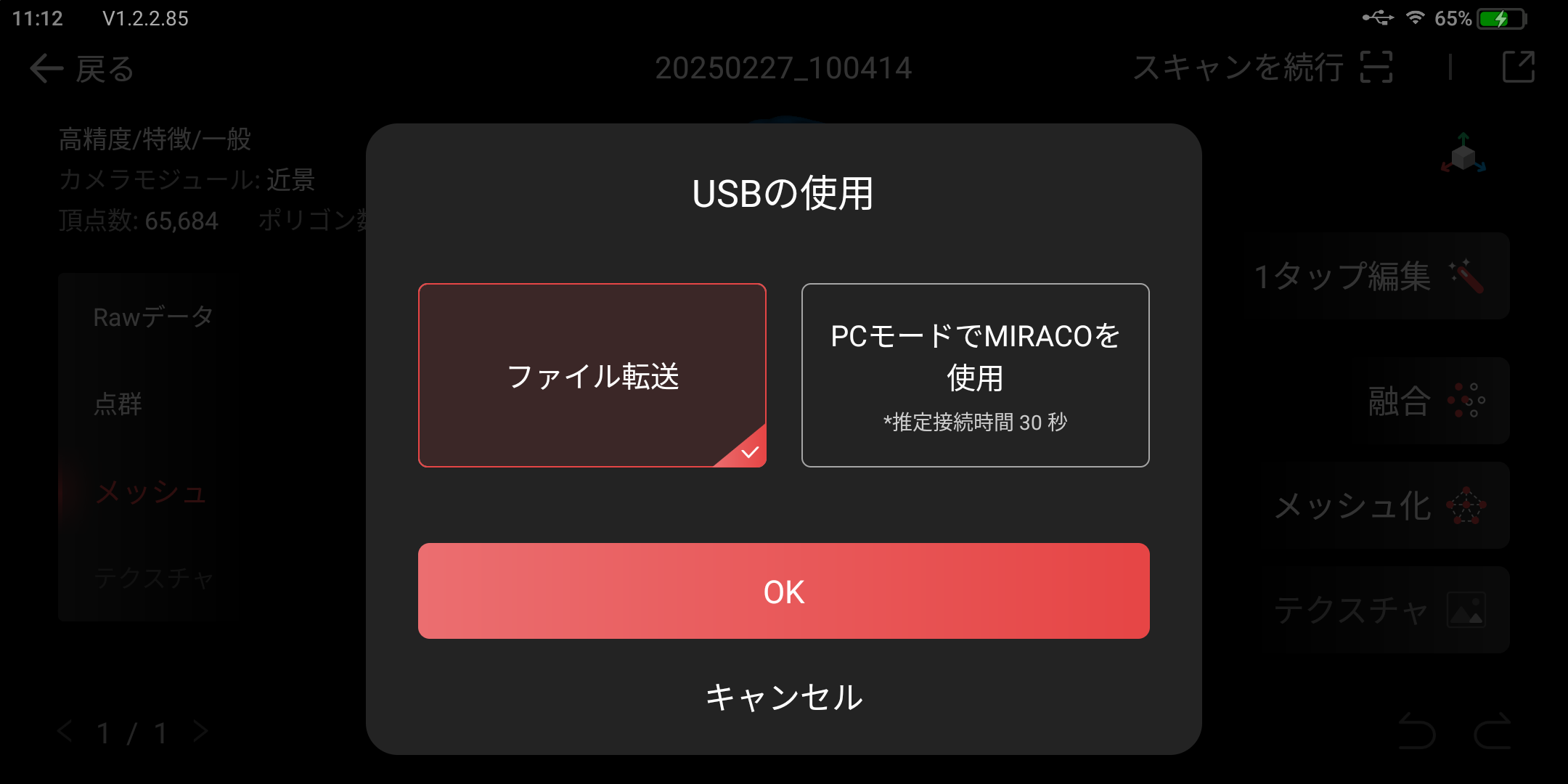
手順 1:USB Type-C to C ケーブルを使用して、MIRACO Plus を PC に接続します。
手順 2:MIRACO Plus のポップアップウィンドウで、[ファイル転送]を選択し、[OK]をタップします。
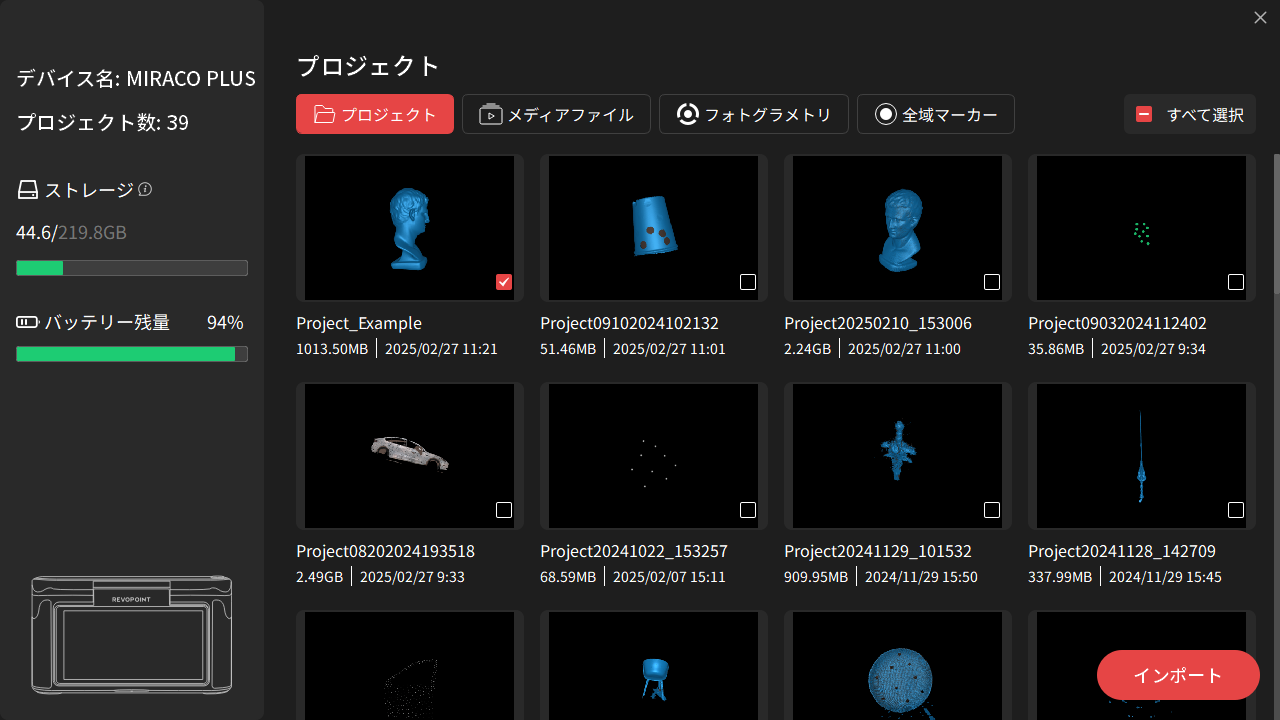
手順 3:Revo Scan(PC)(V5.4.1 以上)を開くと、PC 側に MIRACO Plus のプロジェクトファイルリストが表示されます。
手順 4:対象ファイルにチェックを入れ、[インポート]をクリックして、PC にインポートします。
プロジェクト:スキャン設定、生データ、処理済みデータ、ユーザー操作履歴を含みます。各プロジェクトには、1 つまたは複数の 3D モデルが含まれる場合があります。
ローカルファイルを開くこともできます(Windows PC のみ対応):
手順 1:USB Type-C to C ケーブルを使用して、MIRACO Plus を PC に接続します。
手順 2:MIRACO Plus のポップアップウィンドウで、[ファイル転送]を選択し、[OK]をタップします。
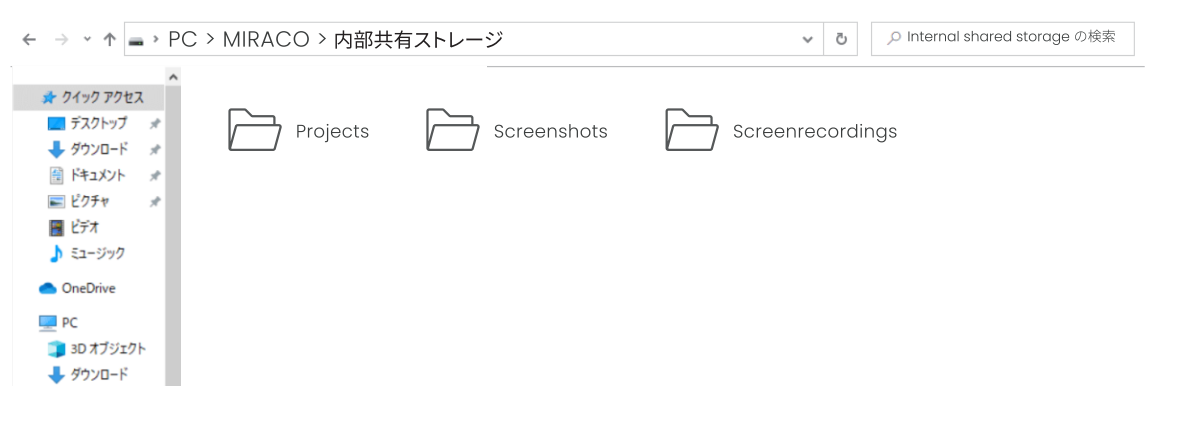
手順 3:[PC] > [MIRACO] > [内部共有ストレージ]をクリックします。
手順 4:Projects フォルダから MIRACO Plus のデータを PC にコピーします。
方法 3:Wi-Fi でモバイル端末にエクスポート
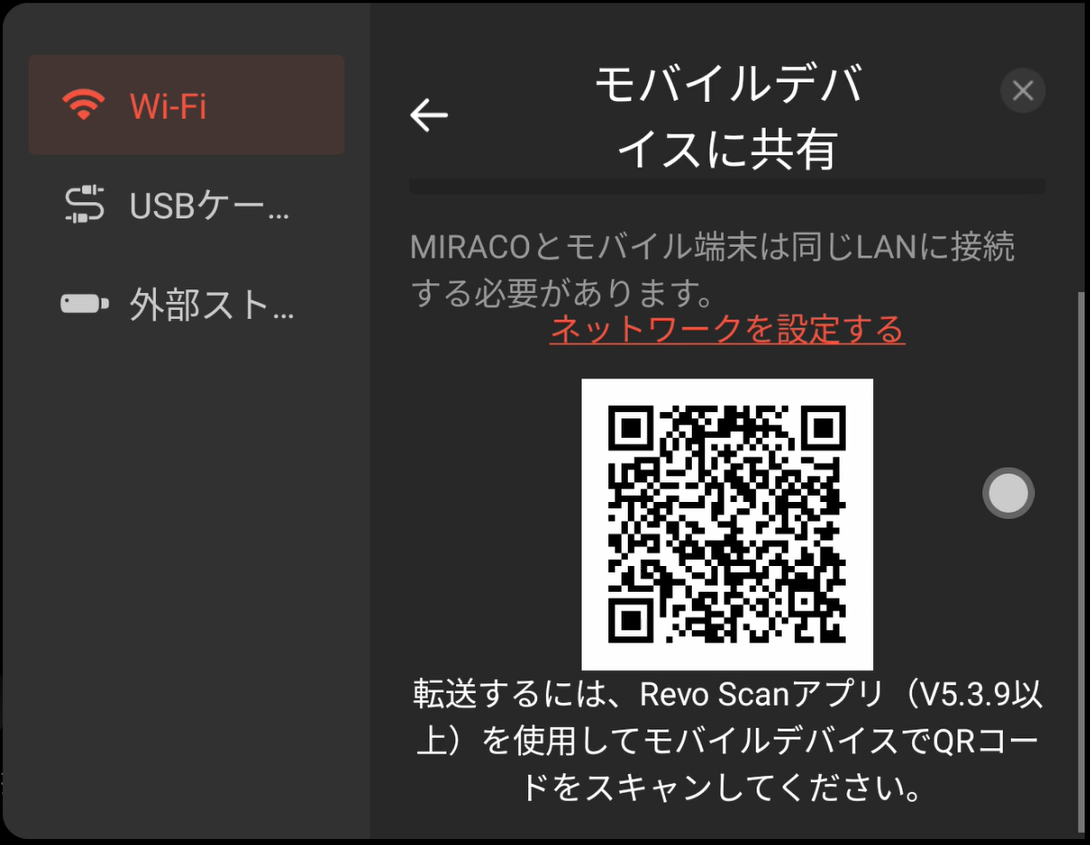
手順 1:MIRACO Plus とモバイルデバイスを同じ Wi-Fi ネットワークに接続してください。
手順 2:共有アイコンをタップし、[モバイルデバイスに共有]を選択します。

手順 3:モバイル端末の Revo Scan(V5.3.9 以上)を使用して、MIRACO Plus の QR コードをスキャンすると、モデルをモバイル端末に共有できます。
方法 4:外部ストレージにエクスポート
手順 1:外部ストレージを MIRACO Plus に接続します。
手順 2:[モデル]をタップし、共有するモデルを選択します。
手順 3:共有アイコンをタップし、USB メモリを選択して、モデルを外部ストレージにエクスポートします。

¶ 11.2 全域マーカー座標のエクスポート
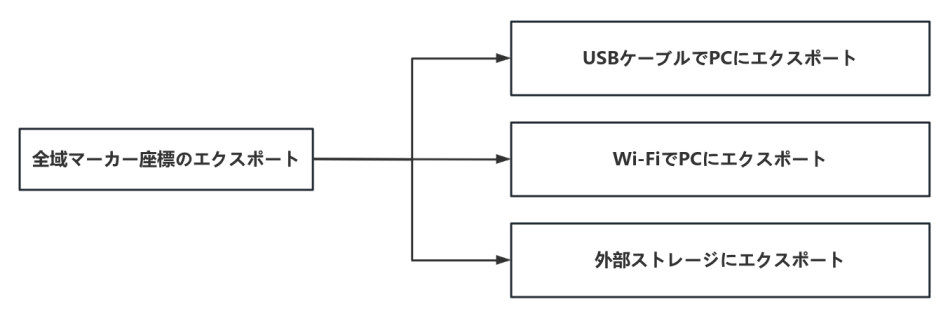
方法 1:USB ケーブルで PC にエクスポート
手順 1:USB Type-C to C ケーブルを使用して、MIRACO Plus を PC に接続します。
手順 2:MIRACO Plus のポップアップウィンドウで、[ファイル転送]を選択し、[OK]をタップします。
手順 3:Revo Scan(PC)(V5.4.1 以上)を開くと、PC 側に MIRACO Plus のファイルリストが表示されます。
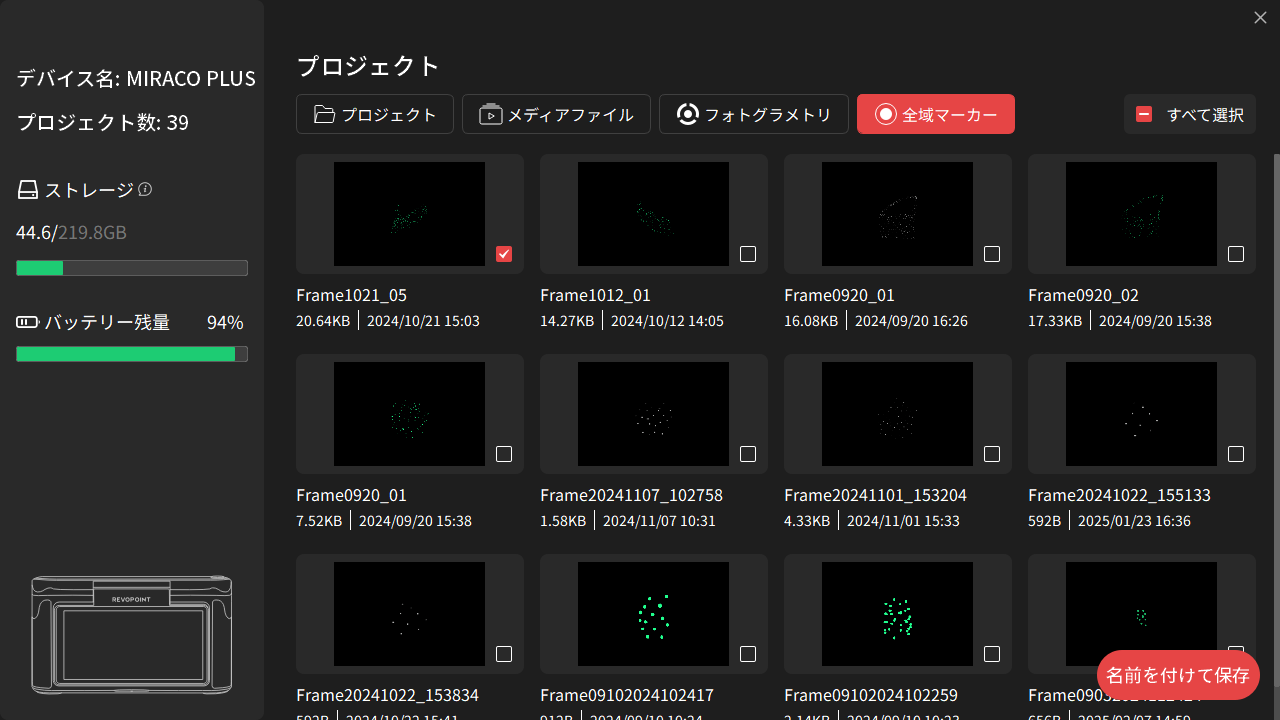
手順 4:[全域マーカー]を選択し、ファイルを選択して、[名前を付けて保存]をクリックし、PC に保存します。
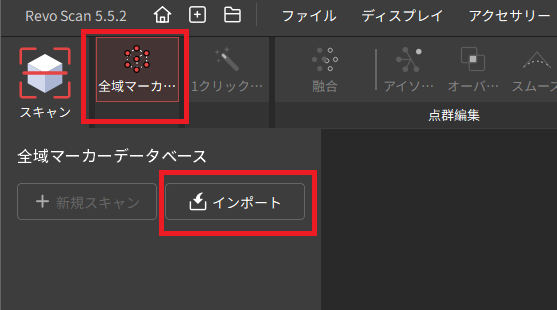
手順 5:Revo Scan(PC)のホーム画面で、[新規プロジェクト]をクリックし、[全域マーカー]を選択して、[インポート]をクリックします。これにより、全域マーカーの座標を Revo Scan(PC)にインポートします。
方法 2:Wi-Fi で PC にエクスポート
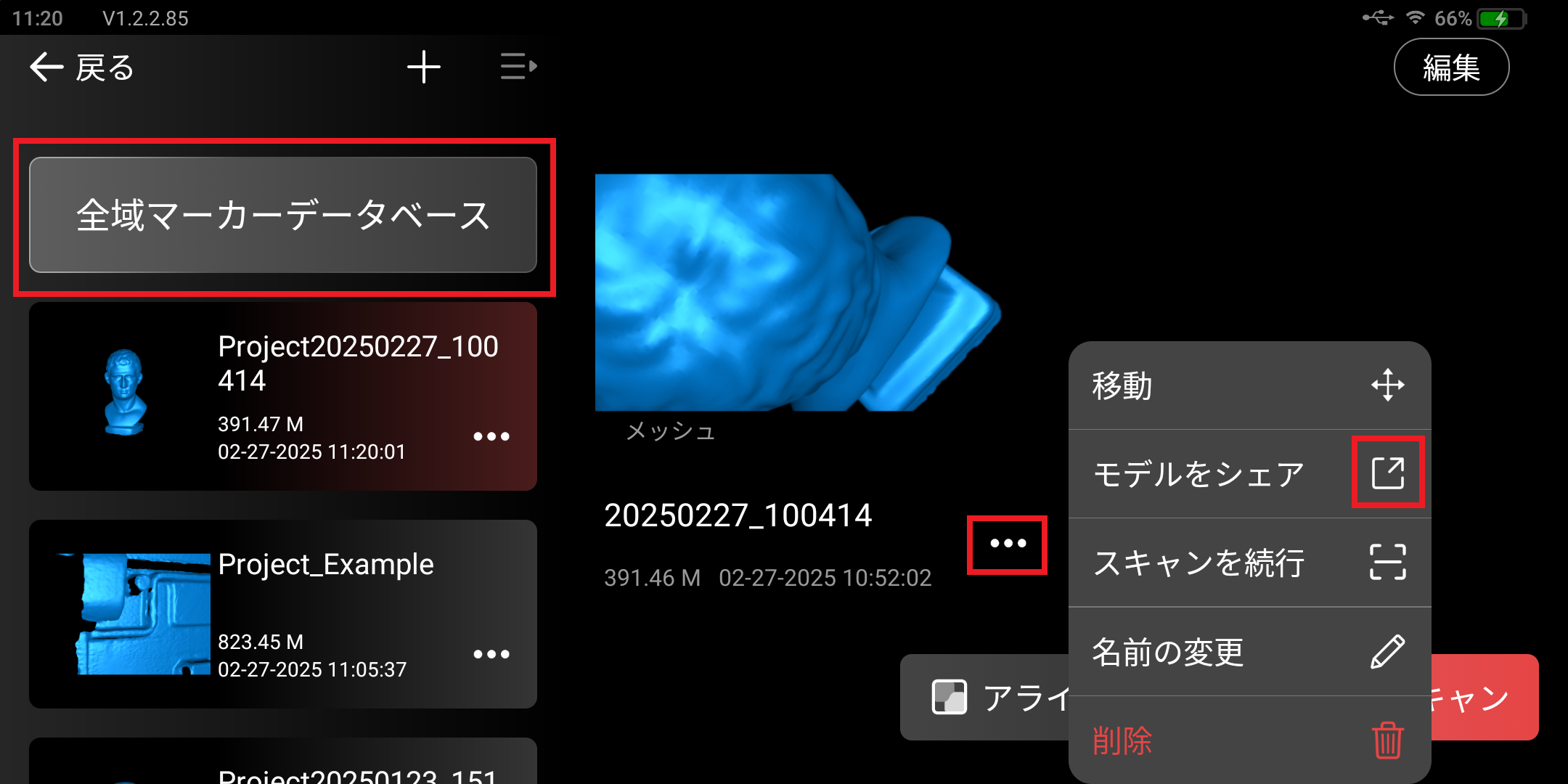
手順 1:MIRACO Plus を開き、右下の[モデル]をタップします。
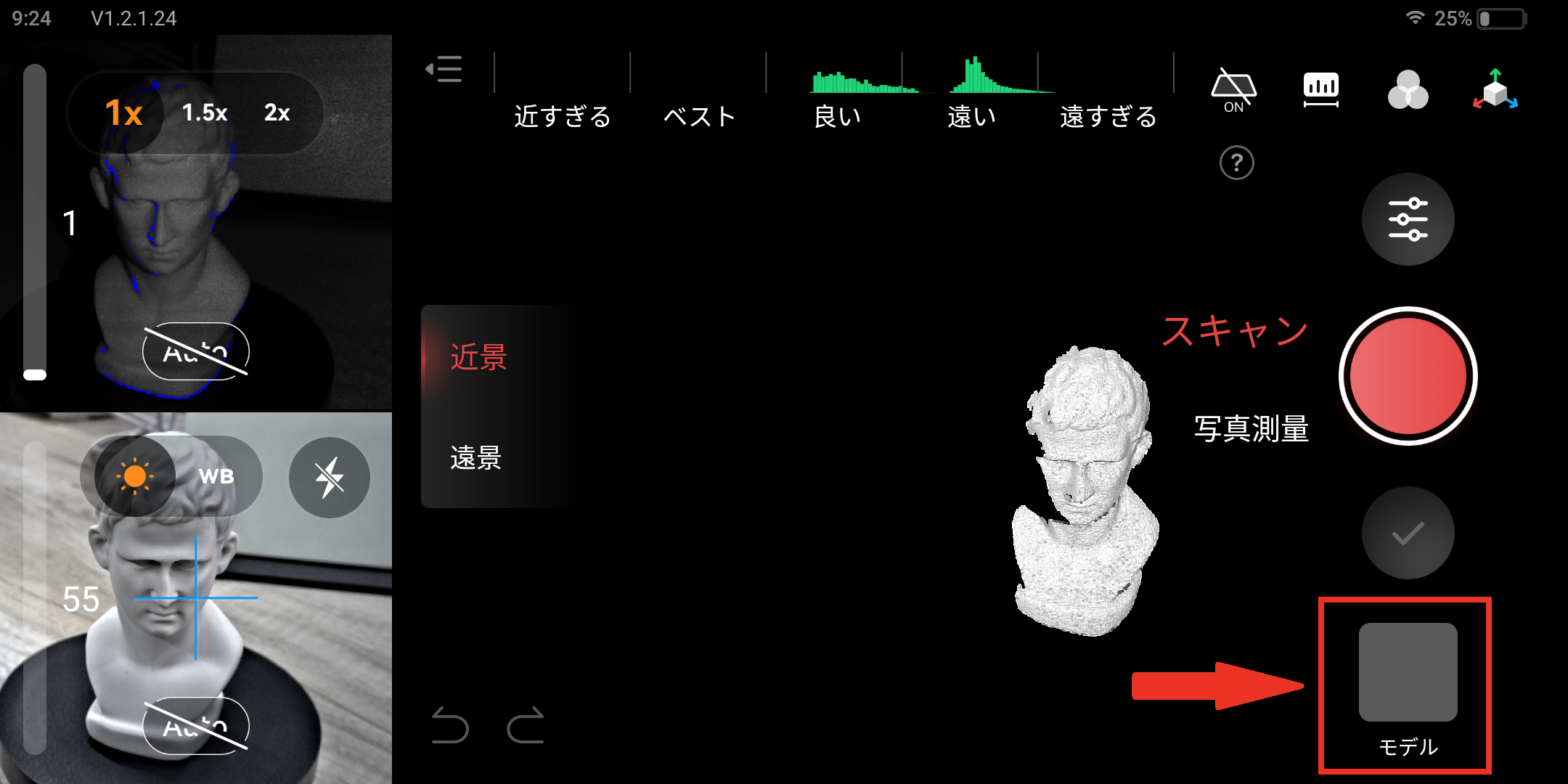
手順 2:[全域マーカーデータベース]に入り、共有する全域マーカーの座標を選択します。モデル管理ボタンをタップし、[モデルをシェア]を選択します。
手順 3:PC とスキャナーを同じ Wi-Fi ネットワークに接続してください。
手順 4:PC で Revo Scan を開き、[新規プロジェクト]をクリックします。
手順 5:[ファイル] > [MIRACO から転送] > [Wi-Fi]を選択します。
手順 6:MIRACO Plus で認証コードを入力するか、PC 上の QR コードをスキャンして、ファイルを PCに転送します。
ご注意:USB 接続での転送を推奨します。全域マーカー座標の転送が完了したら、スキャナーを PC に接続し、全域マーカー座標に基づいて点群スキャンを開始できます。
方法 3:外部ストレージにエクスポート
手順 1:外部ストレージを MIRACO Plus に接続します。
手順 2:[モデル]をタップし、共有する全域マーカー座標を選択します。
手順 3:共有アイコンをタップし、USB メモリを選択して、全域マーカー座標を外部ストレージにエクスポートします。
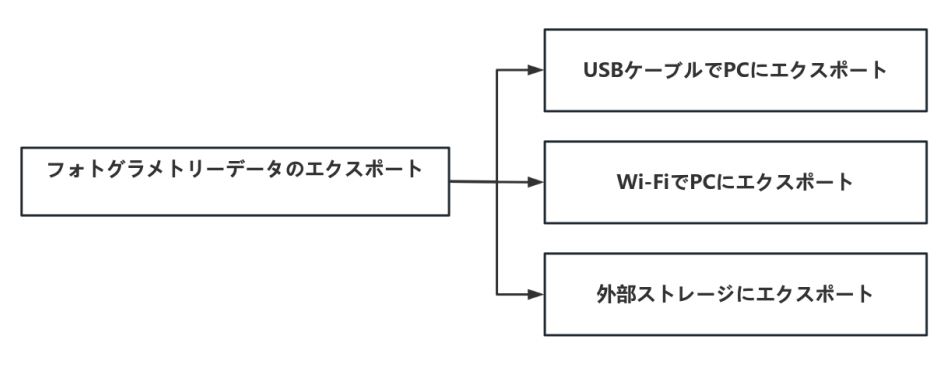
¶ 11.3 フォトグラメトリーデータのエクスポート
方法 1:USB ケーブルで PC にエクスポート
手順 1:USB Type-C to C ケーブルを使用して、MIRACO Plus を PC に接続します。
手順 2:MIRACO Plus のポップアップウィンドウで、[ファイル転送]を選択し、[OK]をタップします。
手順 3:Revo Scan(PC)(V5.4.1 以上)を開くと、PC 側に MIRACO Plus のファイルリストが表示されます。
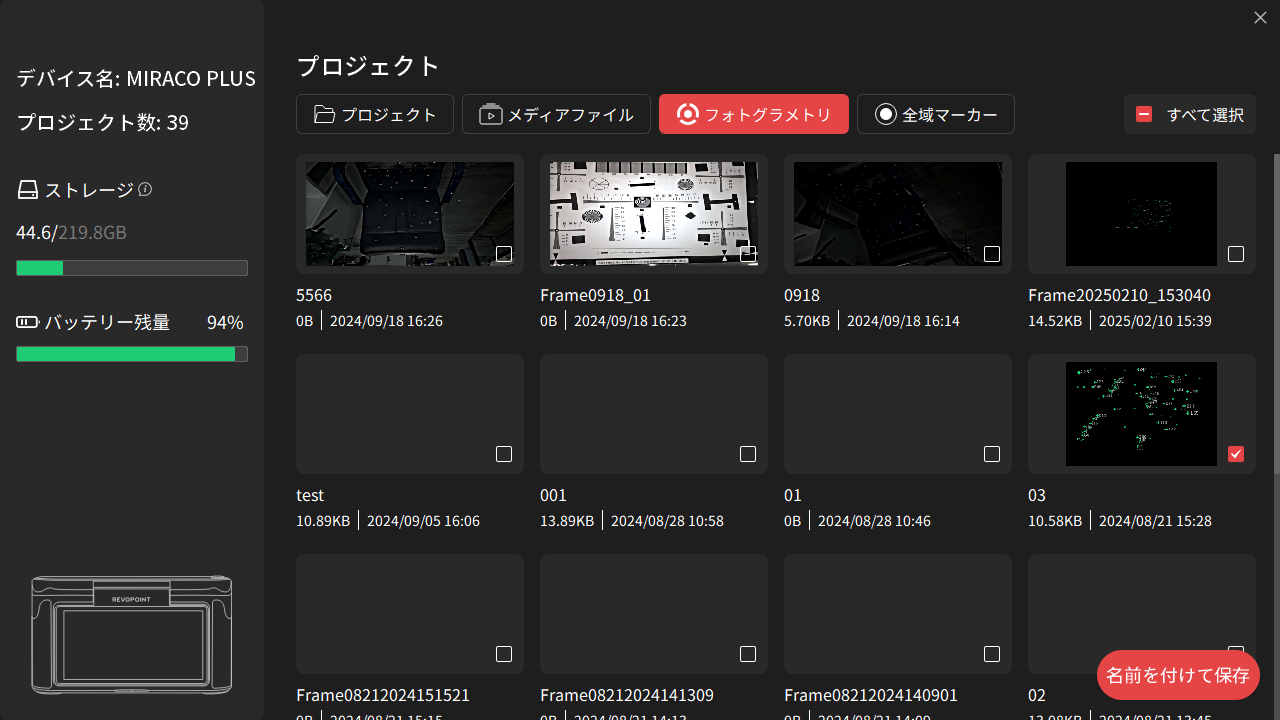
手順 4:[フォトグラメトリ]を選択し、共有するフォトグラメトリーデータを選択して、[名前を付けて保存]をクリックします。
手順 5:プロジェクトインターフェースで、[全域マーカーデータベース]> [インポート]をクリックし、全域マーカーファイルをインポートします。
方法 2:Wi-Fi で PC にエクスポート
手順 1:MIRACO Plus と PC を同じ Wi-Fi ネットワークに接続してください。
手順 2:Revo Scan(PC)で、[ファイル] > [MIRACO から転送] > [Wi-Fi]をクリックします。
手順 3:MIRACO Plus で、共有するフォトグラメトリーデータを選択し、共有アイコンをタップします。
手順 4:認証コードを入力するか、PC 上の QR コードをスキャンして、ファイル転送を開始します。
手順 5:全域マーカーデータベースでインポートされた全域マーカーファイルを確認できます。
方法 3:外部ストレージにエクスポート
手順 1:外部ストレージを MIRACO Plus に接続します。
手順 2:[モデル]をタップし、共有するフォトグラメトリーデータを選択します。
手順 3:共有アイコンをタップし、USB メモリを選択して、フォトグラメトリーデータを外部ストレージにエクスポートします。
¶ 12. スキャナーの校正
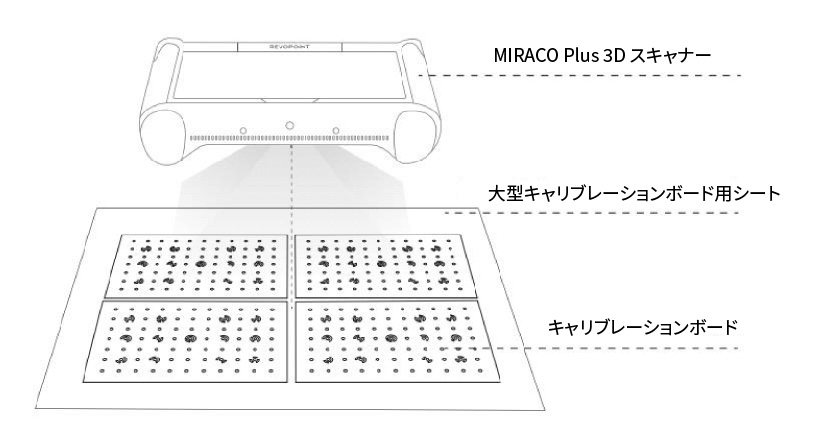
① 遠景モード用キャリブレーションボード、近景モード用キャリブレーションボード、および大型キャリブレーションボード用シートを用意します。
② MIRACO Plus の電源ボタンを長押し(約 5 秒)して、スキャナーを起動します。
③ 画面の上部から下にスワイプして、クイック設定センターに入ります。設定ボタンをタップし、下にスクロールして[スキャナーの校正]オプションを見つけます。
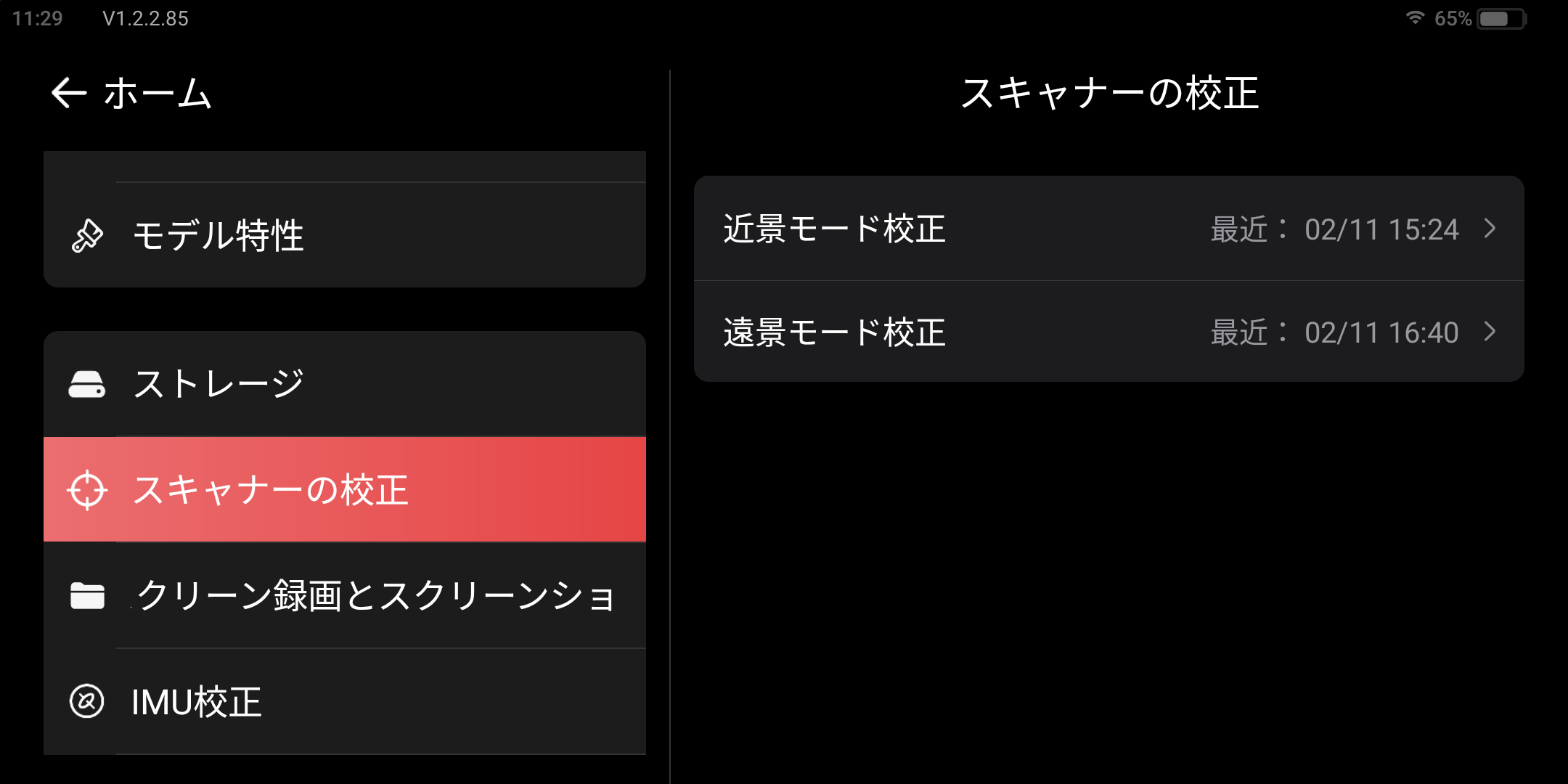
④ 画面の指示に従って、近景カメラと遠景カメラの精度テストおよびキャリブレーションを順番に完了します。
Revo Scan 5(PC)でスキャナーをキャリブレーションするには、以下の手順に従ってください。
① Revopoint 公式サイト(https://www.revopoint3d.jp)の「サポート - ダウンロード」ページから、最新バージョンの Revo Scan をダウンロードします。
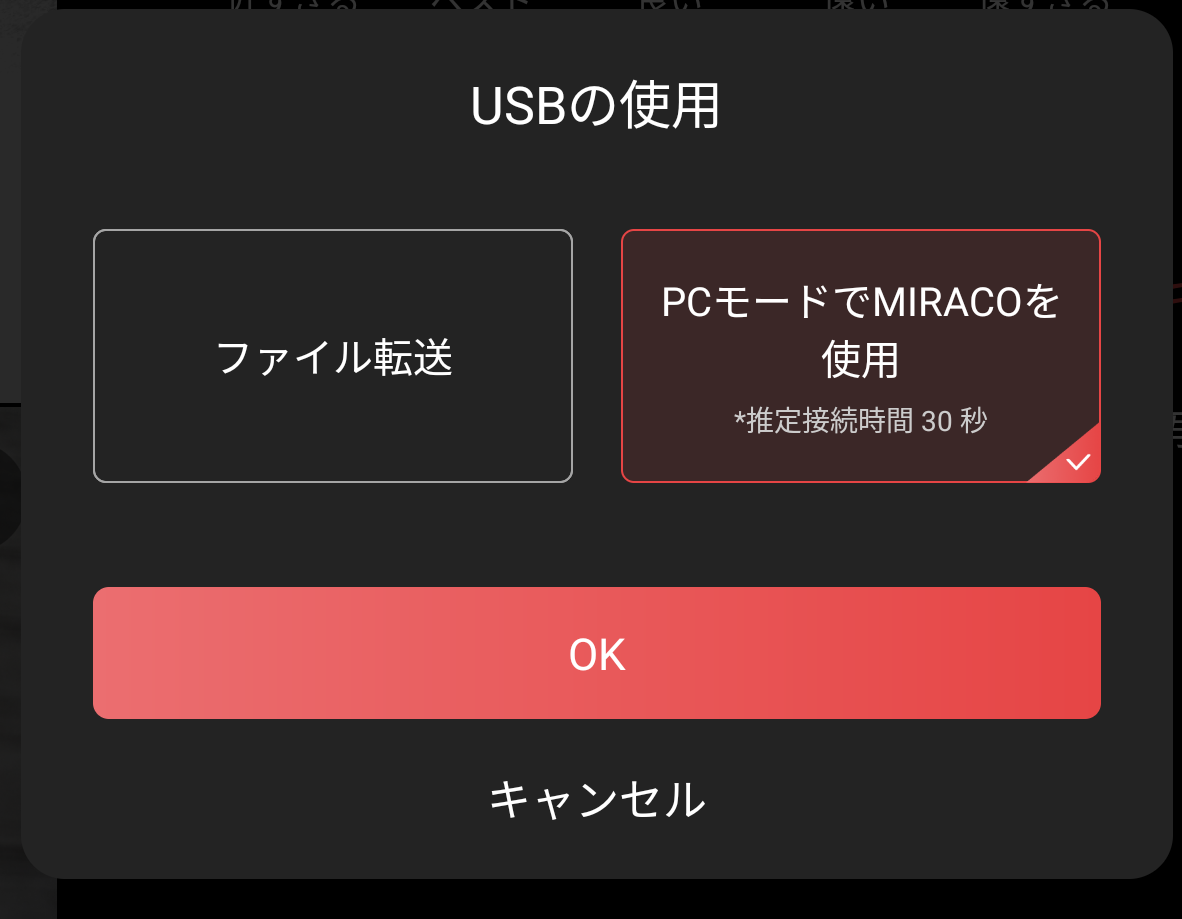
② USB Type-C to C ケーブルを使用して、MIRACO Plus を PC に接続します。(USB Type-A to Type-Cアダプターを使用する場合は、アダプターが USB 3.0 に対応していることを確認してください)。
③ [PC モードで MIRACO を使用]を選択し、[OK]をタップします(左図にご参照)。
④ Revo Scan 5 に[スキャナー接続済み]と表示されたら、Revo Scan ホーム画面の左下にある[スキャナーの校正]をクリックして、キャリブレーションプロセスに入ります(右図にご参照)。
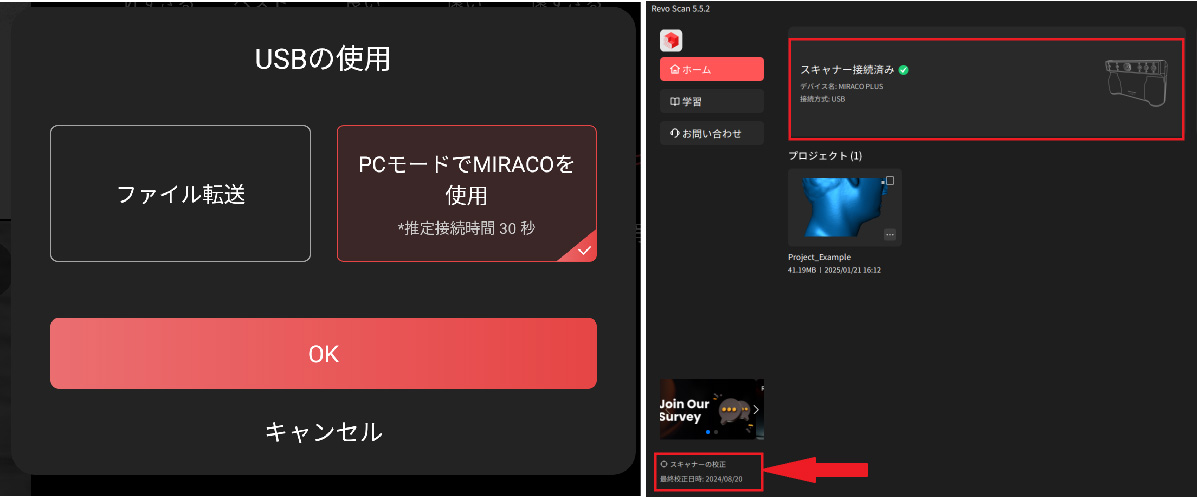
⑤ 画面の指示に従って、近景カメラと遠景カメラの精度テストおよびキャリブレーションを順番に完了します。キャリブレーションが完了するまでMIRACO Plusの白色LEDが点灯します。
¶ 13.PCモードでスキャン
より多くのスキャン設定が必要な場合や、スキャンプロセスを処理するためにより強力なデバイスが必要な場合、MIRACO Plus は Revo Scan(PC)との接続によるスキャンもサポートしています。接続方法は[スキャナーの校正]と同じです。
手順 1:MIRACO Plus のポップアップウィンドウで、[PC モードで MIRACO を使用]を選択し、[OK]をタップします。
[スキャナー接続済み]と表示されるまでしばらくお待ちください。
手順 2:Revo Scan のホーム画面で、[新規プロジェクト]をクリックし、ファイルに名前を付けて保存パスを選択します。
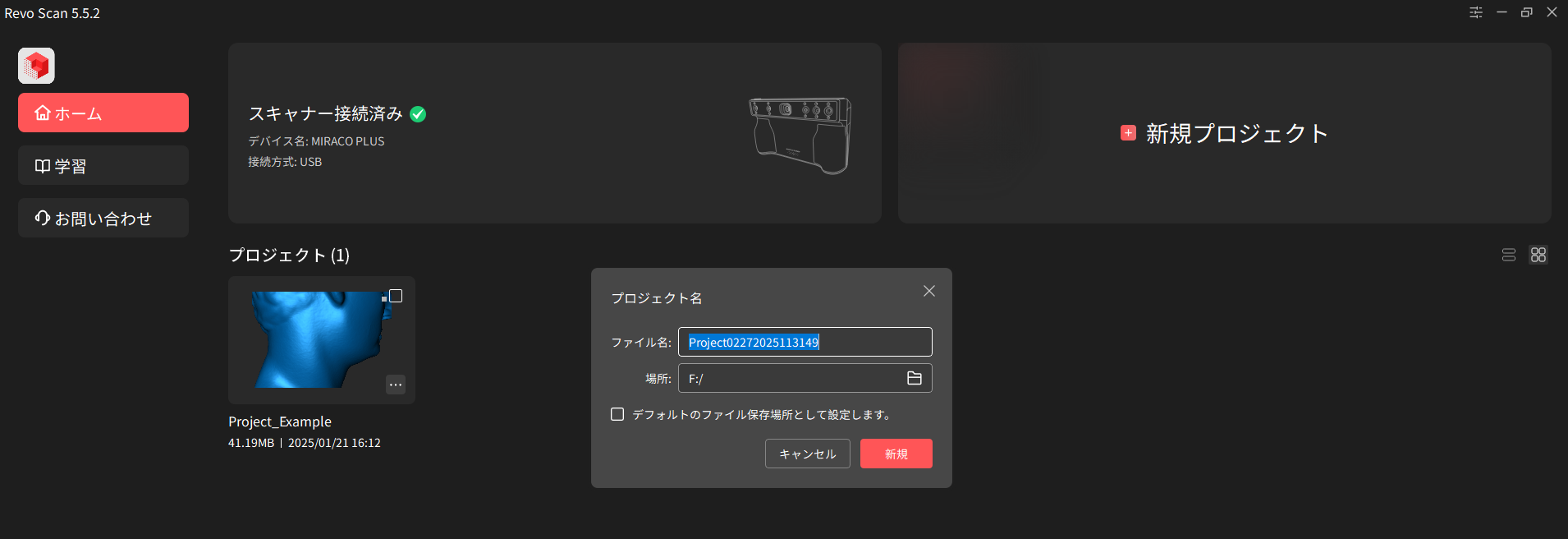
手順 3:プロジェクトページに入ります。
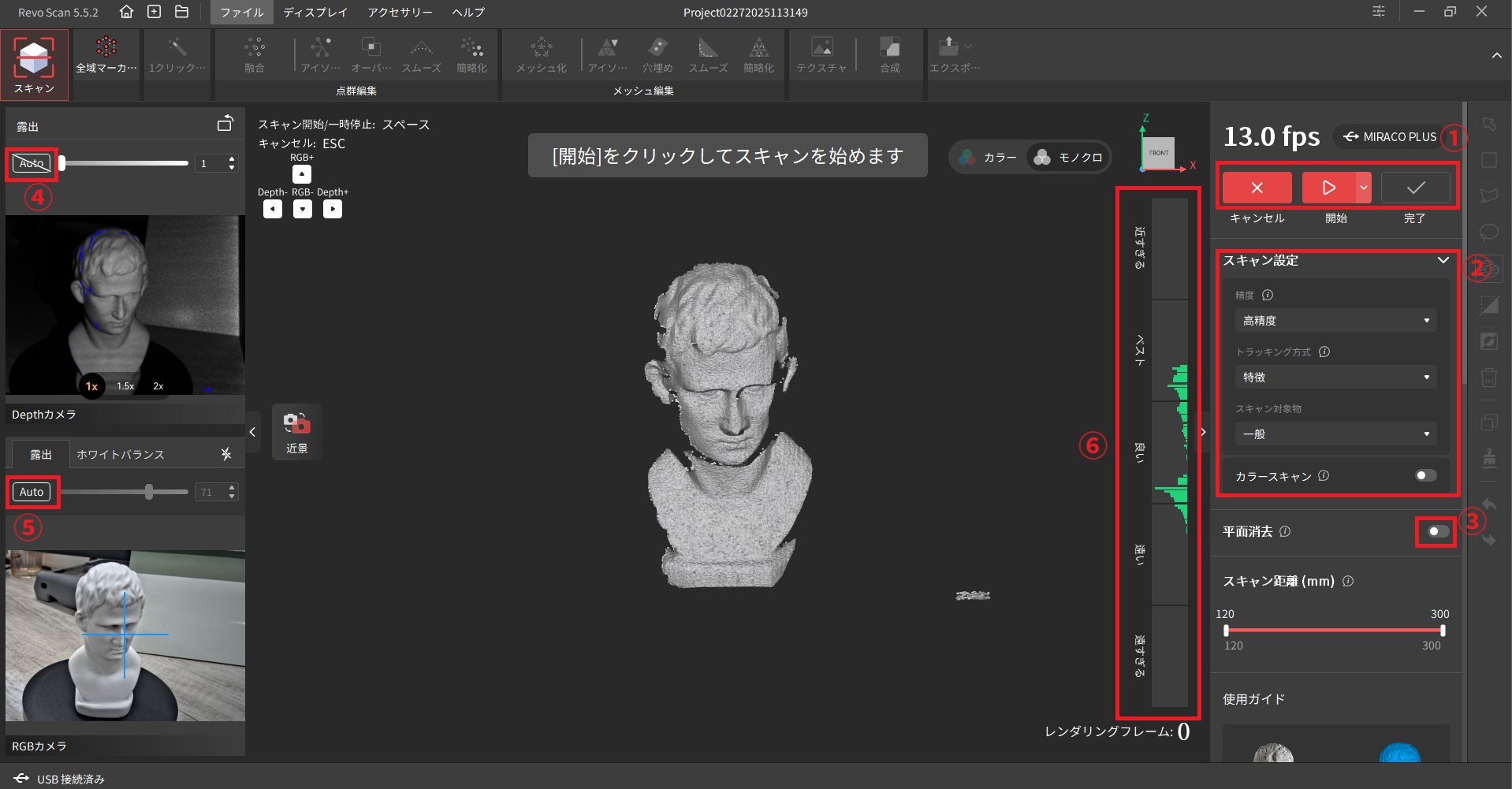
① スキャンボタン
 :クリックしてスキャンを開始します。
:クリックしてスキャンを開始します。
 :スキャン中にここをクリックしてスキャンを一時停止し、モデルのスキャン進捗を確認します。
:スキャン中にここをクリックしてスキャンを一時停止し、モデルのスキャン進捗を確認します。
 :ここをクリックしてスキャンを完了し、モデル編集画面に進みます。
:ここをクリックしてスキャンを完了し、モデル編集画面に進みます。
 :ここをクリックしてスキャンをキャンセルします。
:ここをクリックしてスキャンをキャンセルします。
② スキャンシーンの設定
③ 平面消去
④  ボタンをクリックして自動露出を有効にします。再度クリックすると自動露出が無効になり、スライダーをドラッグして手動で露出値を調整できます。高精度スキャンを得るため、スキャン対象物の表面の赤色または青色のエリアができるだけ少なくなるように露出を調整してください。
ボタンをクリックして自動露出を有効にします。再度クリックすると自動露出が無効になり、スライダーをドラッグして手動で露出値を調整できます。高精度スキャンを得るため、スキャン対象物の表面の赤色または青色のエリアができるだけ少なくなるように露出を調整してください。
⑤ ボタンをクリックして自動露出を有効にします。再度クリックすると自動露出が無効になり、スライダーをドラッグして手動で露出値を調整できます。
⑥ スキャナー距離を調整し、スキャン距離バーが[ベスト]または[良い]を示すまで、スキャナーと対象物との距離を調整してください。
手順4:スキャン完了後に得られたデータは、物体の外観表面の 3D 点群データです。これを融合やメッシュ化などの操作にかけて、使用可能で高品質な 3D モデルに変換します。モデル処理には「1 タップ編集」と「手動編集」の 2 つの方法があります。
¶ 14. スクリーンミラーリング
¶ 14.1 テレビへの画面共有
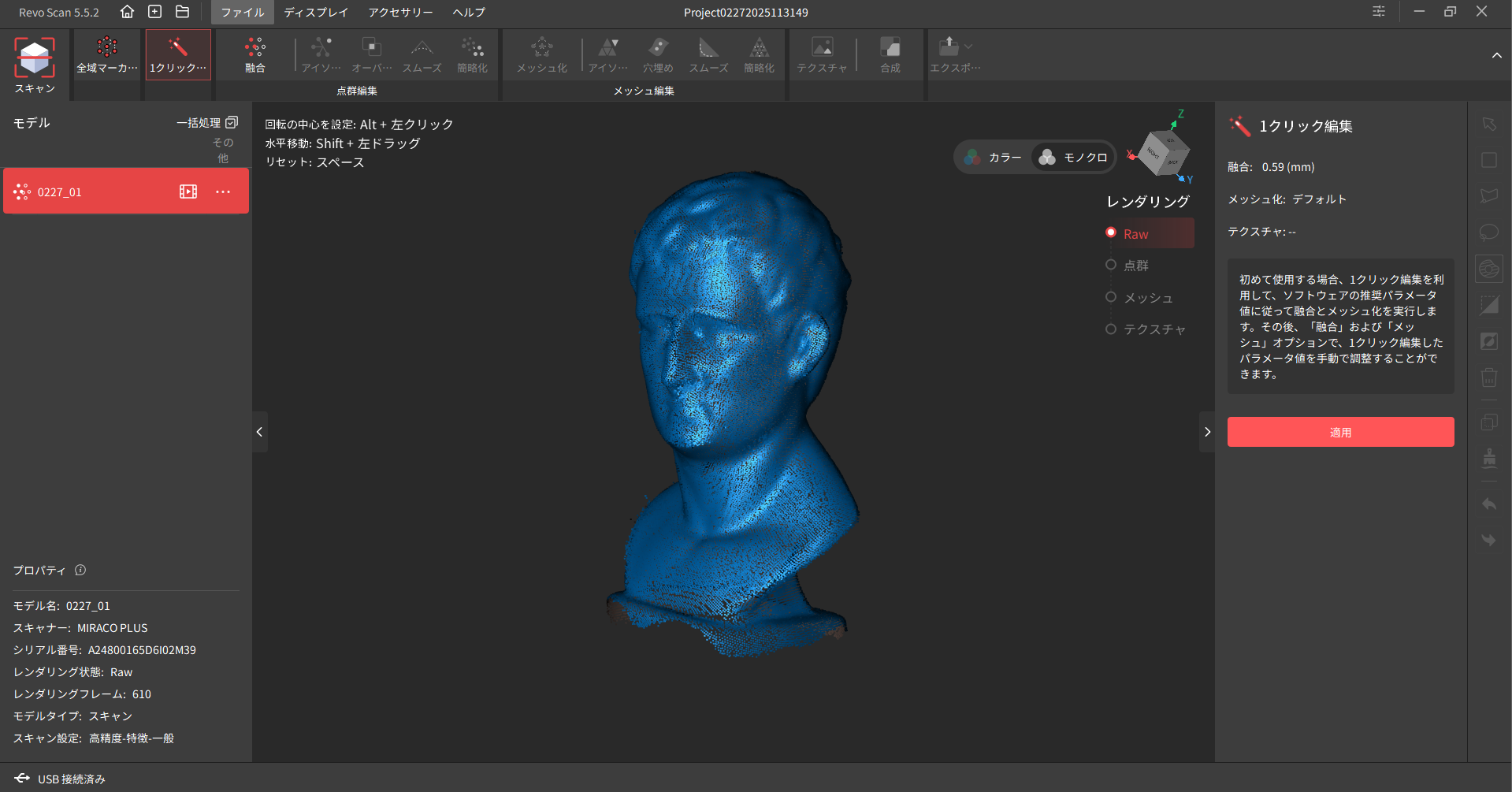
MIRACO Plusには、DisplayPort(DP)に対応した USB Type-C ポートを搭載しています。
方法 1:映像出力可能な USB Type-C ポートを通じて、MIRACO Plus をモニターまたはテレビに接続します。
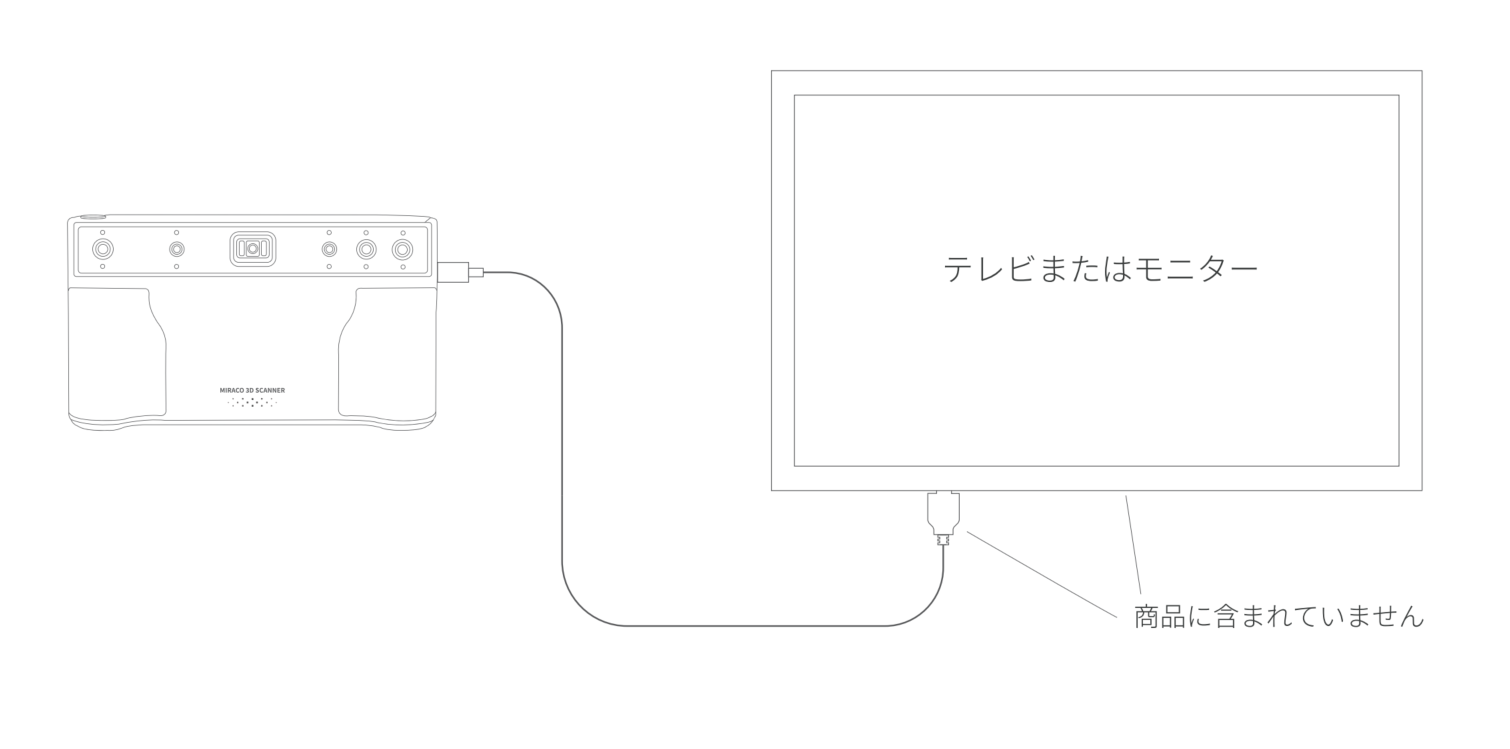
方法 2:HDMI 変換アダプターを MIRACO Plus と HDMI ケーブルに接続し、そのケーブルをモニターまたはテレビに接続します。
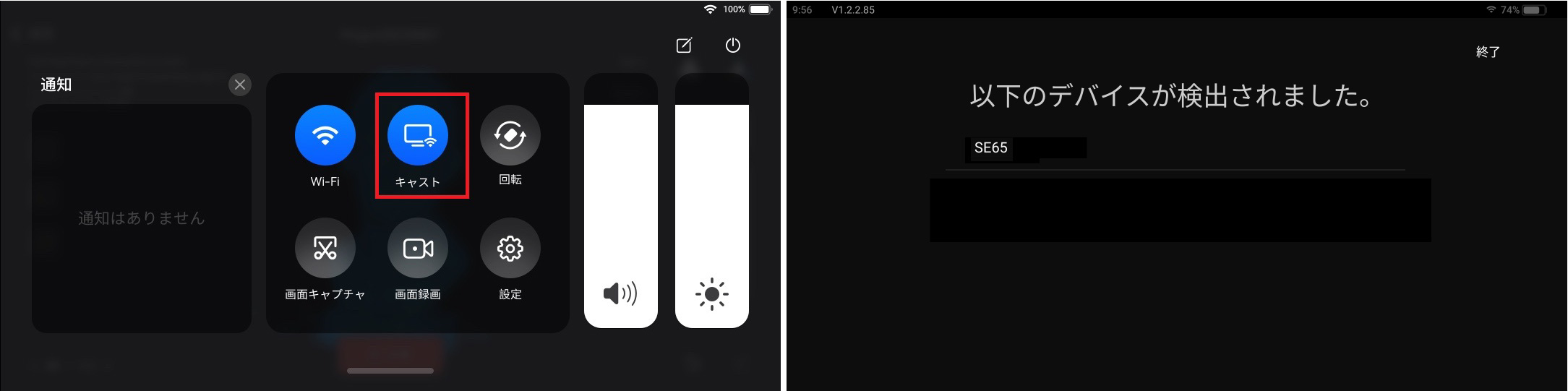
Wi-Fi キャスト:MIRACO Plus は Wi-Fi で TV にミラーリングします。
方法:スキャナーと TV を同じ LAN に接続し、上部メニューバーを下にスワイプして[キャスト]をタップします。
¶ 14.2 PCへの画面共有
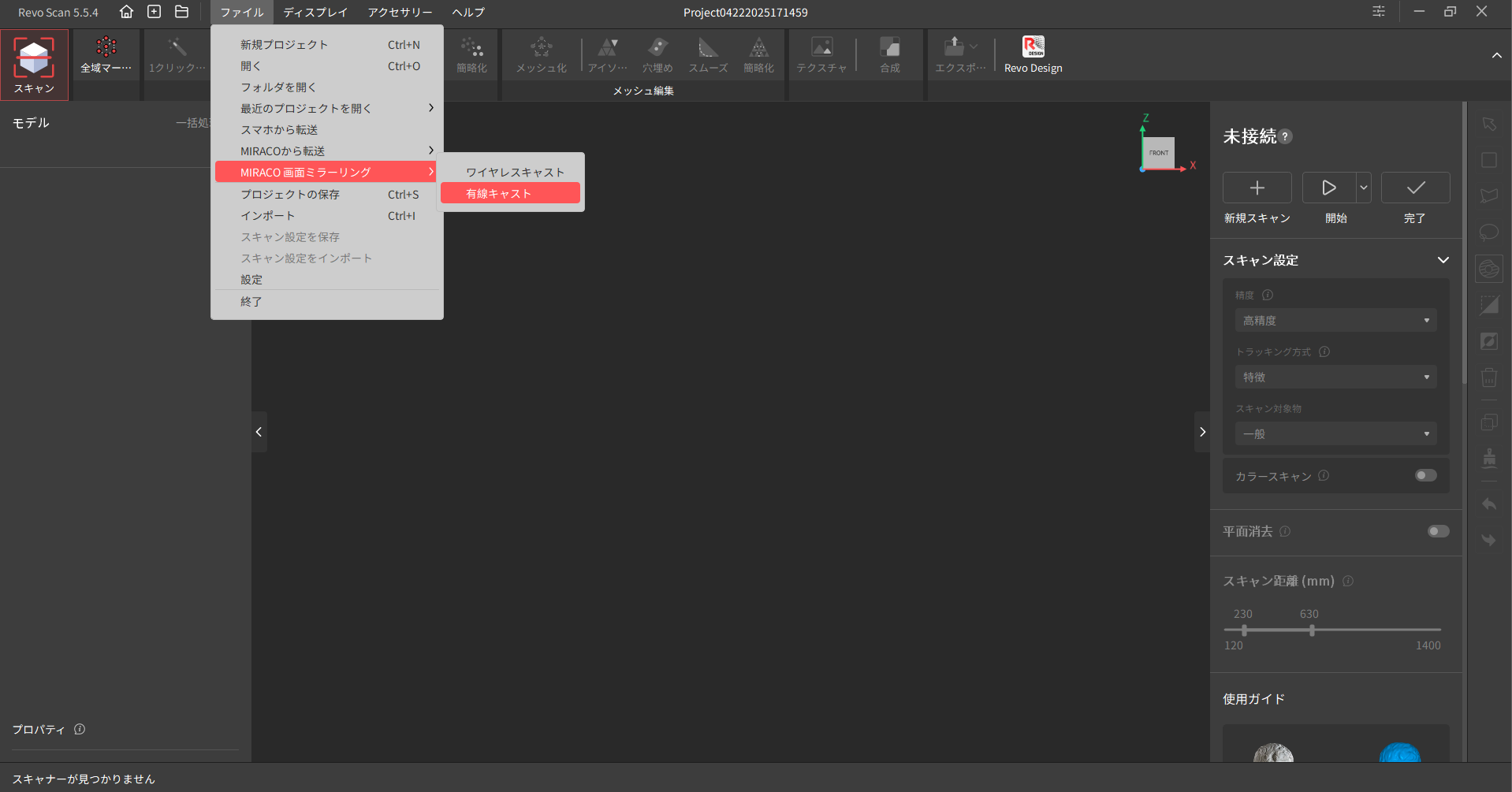
この機能を使用するには、ソフトウェアをV5.5.4以降にアップデートしてください。① 有線キャスト:MIRACO はUSB Type-Cポートを使用してPCに接続して画面を共有します。
ステップ1:付属のUSB Type-C to Type-Cデータケーブルを使用して、スキャナーをPCのUSB 3.0ポートに接続してください。USB Type-A to Type-Cアダプターを使用する場合は、そのアダプターがUSB 3.0をサポートしていることを確認してください。
ステップ2:スキャナーが Revo Scan 5 に正常に接続されたら、「新規プロジェクト」>「ファイル」>「MIRACO 画面ミラーリング」>「有線キャスト」を順にクリックしてください。
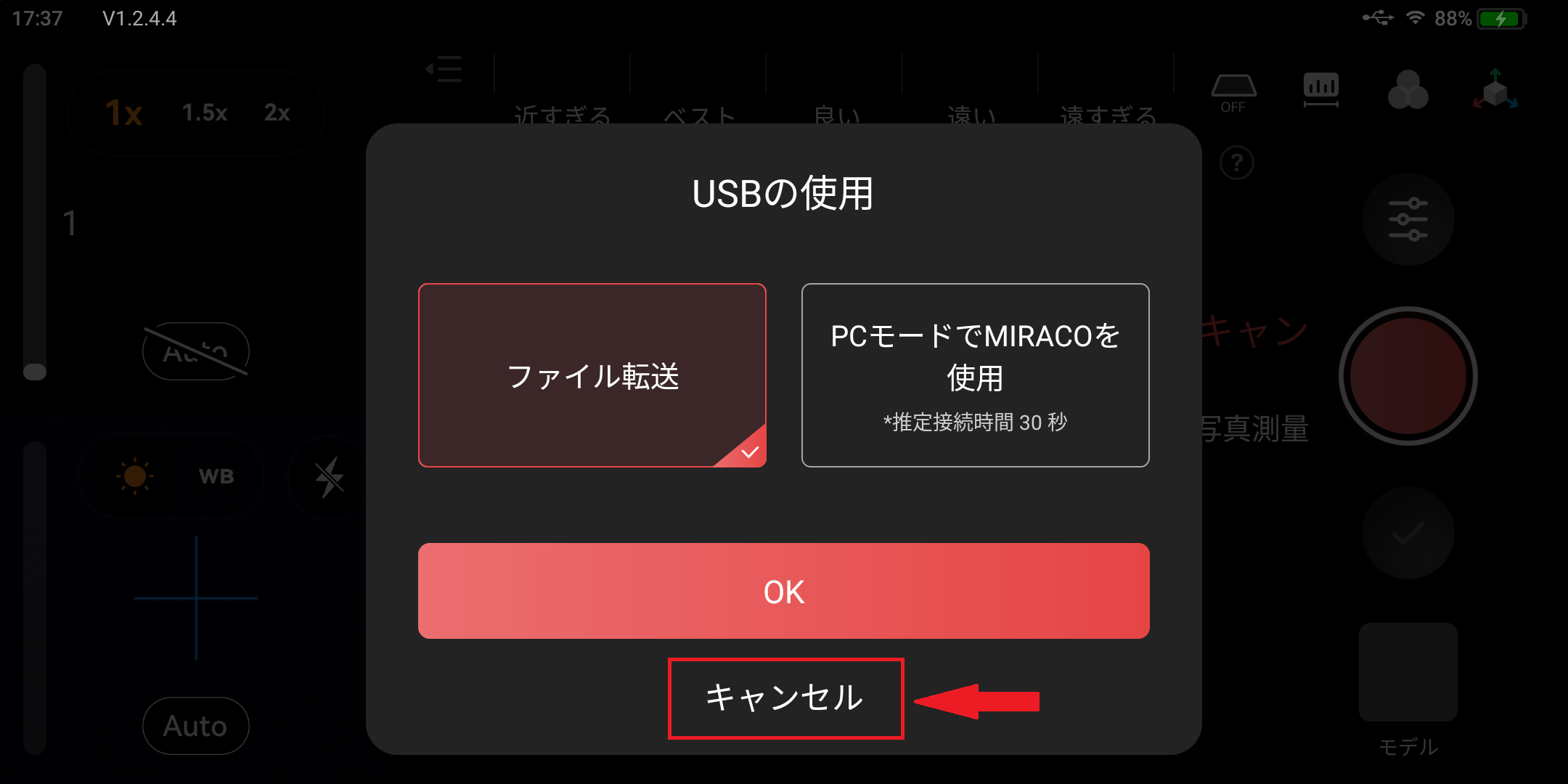
ステップ3:ソフトウェアの画面指示に従い、スキャナー上に表示される「USBの使用」ポップアップで「キャンセル」をタップしてください。
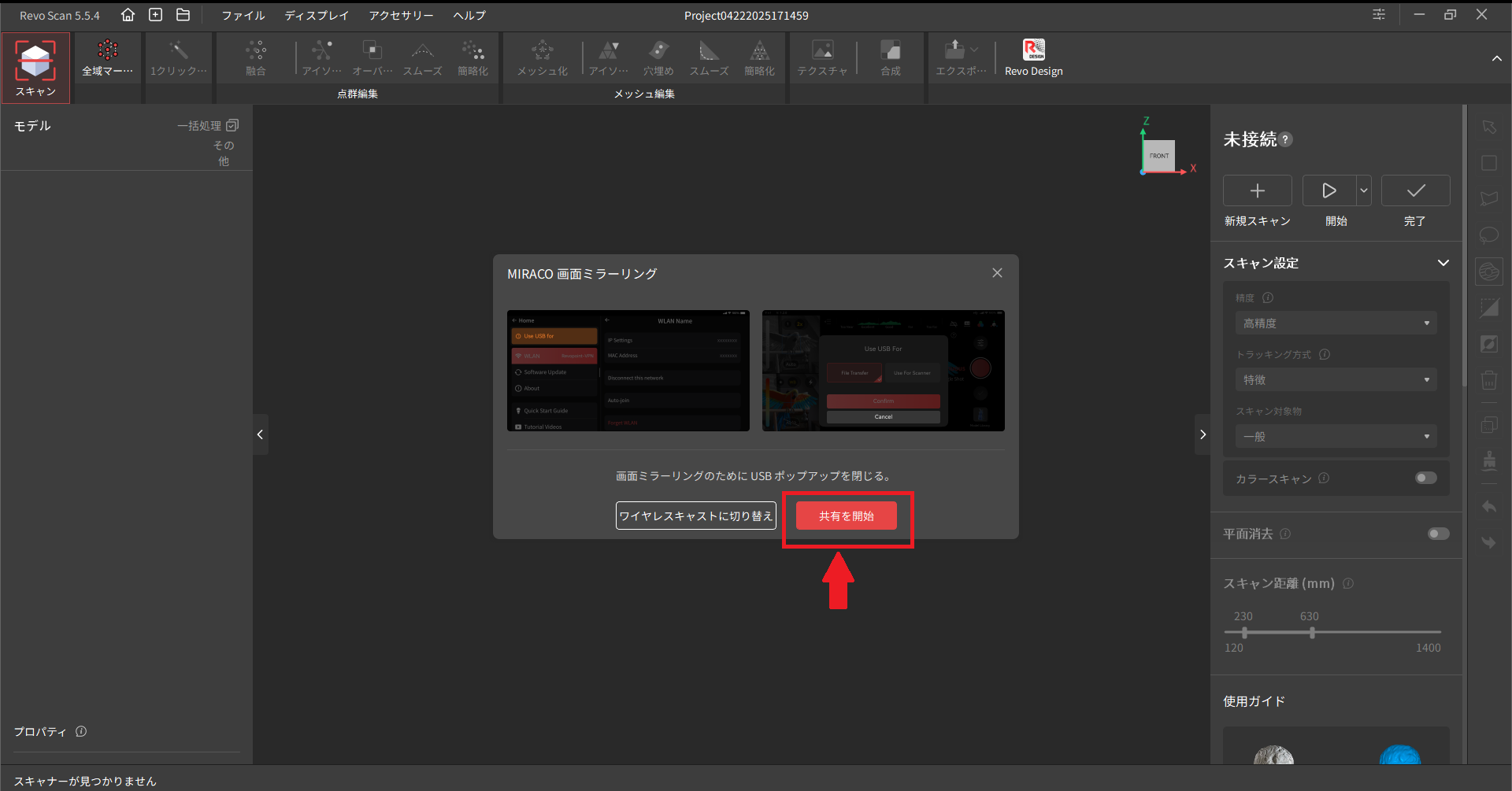
ステップ4:「共有を開始」をクリックし、画面共有を行ってください。
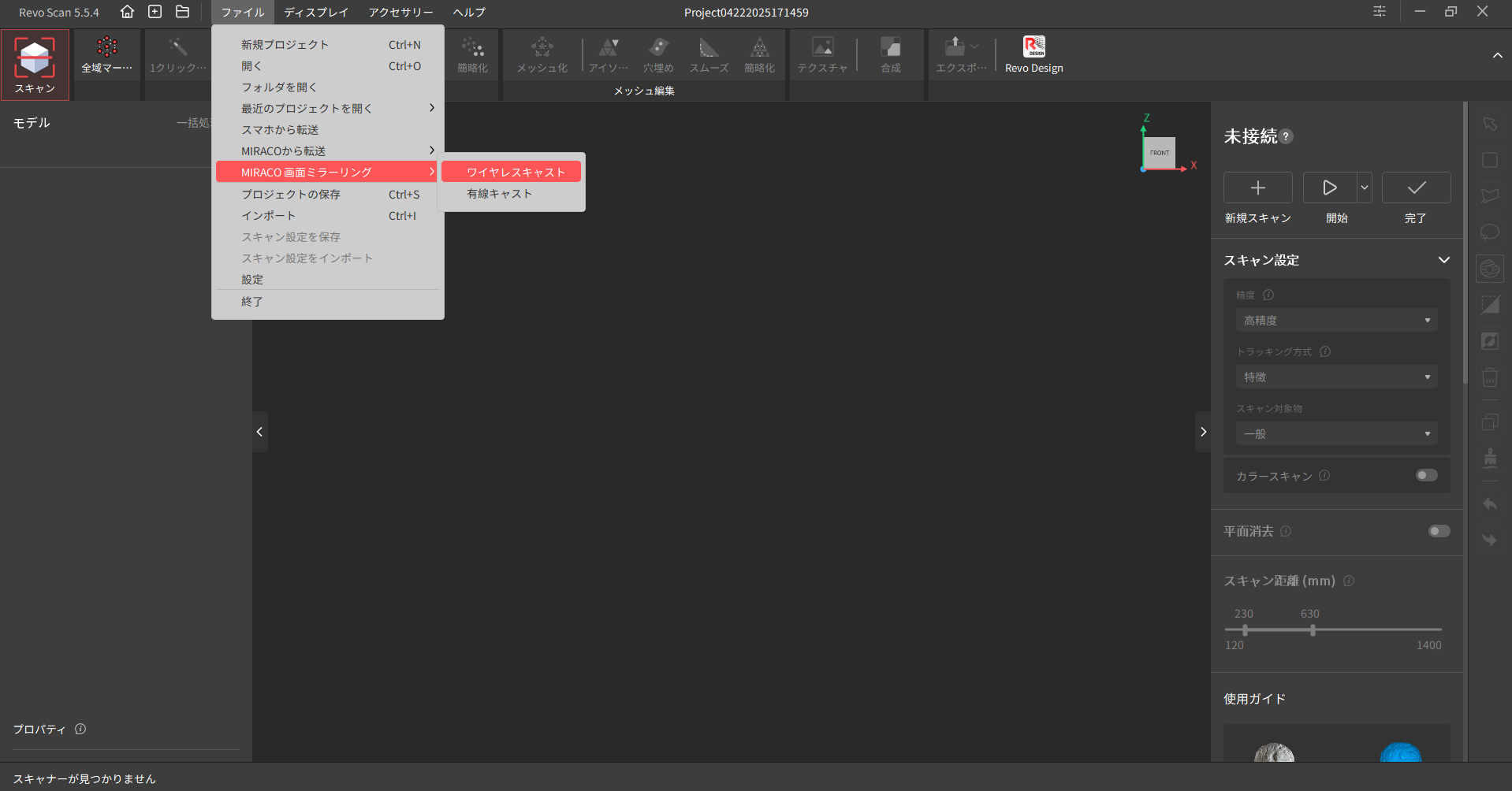
② ワイヤレスキャスト:MIRACOはWi-Fiを使用してPCにミラーリングを行います。
ステップ1:スキャナーとPCを同じWi-Fiネットワークに接続してください。
ステップ2:スキャナーが Revo Scan 5 と正常に接続されたら、「新規プロジェクト」>「ファイル」>「MIRACO 画面ミラーリング」>「ワイヤレスキャスト」を順にクリックしてください。
ステップ3:スキャナーのメニューを下にスワイプして、「設定」>「WLAN」をタップしてください。接続済みネットワークの横にある ⓘ ボタンをタップして、ネットワークのIPアドレスを確認してください。


ステップ4:下図のように、PCソフトウェア画面の指示に従い、IPアドレスを入力してください。
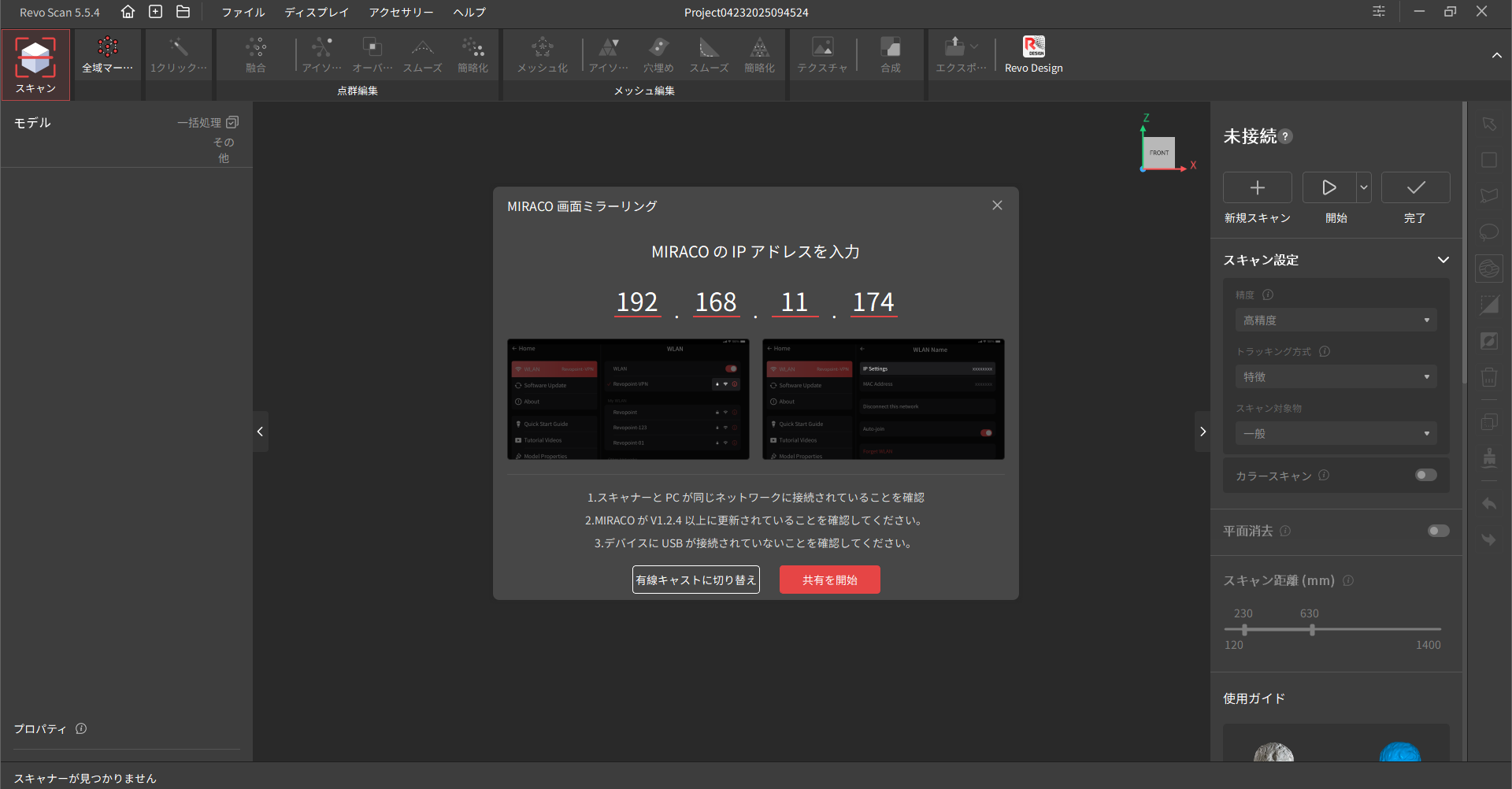
ステップ5:「共有を開始」をクリックし、画面共有を行ってください。
¶ 付録
¶ 製品情報
| 品名 | MIRACO Plus |
| スキャン方式 | スタンドアロン手持ち&据え置き、フォトグラメトリ計測キット |
| テクノロジー | 光学ズーム付きクアッドカメラ赤外線構造光源、超解像度写真測量学 |
| オブジェクトサイズ | 小型、中型、大型 |
| シングルフレーム精度 | 0.02 mm |
| シングルフレーム正確度 | 0.04 mm |
| フォトグラムメトリック長さ精度 | 0.02 mm + 0.05 mm×L(m)。Lは最大測定距離(单位:メートル) |
| 点間距離 | 0.05 mm |
| 動作距離 | 100 - 1000 mm |
|
シングルスキャン範囲 (最小距離) |
28 × 53 mm at 100 mm |
|
シングルスキャン範囲 (最大距離) |
975 × 775 mm at 1000 mm |
| 画角(高さ×幅) | 近 40×30°、遠 56×42° |
| 最小スキャンサイズ | 4 × 4 × 4 m |
| スキャンスピード(最大) | 20 fps |
| 深度解像度(最大) | 200 万画素 |
| RGB カメラ解像度 | 4800 万画素 |
| カラースキャン | あり |
| トラッキング方式 | 特徴、マーカー、全域マーカー |
| 屋外スキャン | 可 |
| 光源 | クラス 1 赤外線 |
| 赤外線補助照明 | 8 |
| LED 補助照明 | 2 |
| 位置センサー | 9 軸 IMU |
| CPU | 8 コア ARM A76、2.4GHz、GPU Mali G52 |
| チップ機能 | 深度データ計算、3D スキャン、点群処理と編集 |
| ストレージ | 256 GB |
| メモリ | 32 GB |
| タッチスクリーン | 6 インチ |
| ボタン | 2 |
| 最低 PC 要件 |
macOS CPU M1 Pro 以上、RAM≧8GB Windows CPU Intel i7 12th 以上、RAM 16GB 以上 |
| 推奨 PC 要件 |
macOS CPU M3 以上、RAM≧8GB windows CPU Intel i9 11th 以上、RAM 32GB 以上 |
| 対応 OS | Windows 10/11(64 ビット)、macOS 11.0 以上 |
| ネイティブシステム | Android |
| 出力フォーマット | PLY、OBJ、STL、ASC、3MF、GLTF、FBX |
| 3D プリント用データ出力 | √ |
| Wi-Fi 規格 | 6 |
| Bluetooth 規格 | 4.1 |
| 接続ポート | USB Type-C |
| 出力電圧 |
DC 7-11V 5A 65W 急速充電に対応 |
| 電源供給 | 電池容量 5000 mAh |
| 本体重量 | 750 g |
| 本体寸法(長さ×幅×高さ) | 200 × 50 × 110 mm |
| 特殊オブジェクトのスキャン | 透明、暗い、反射する対象物をスキャンする際にスキャンスプレーを使用 |
| スキャナーの校正 | 可 |
| 対応アクセサリー | 大型ターンテーブル、2軸ターンテーブル、MIRACO 用大型キャリブレーションボード、パワーバンクキット、フォトグラメトリ計測キット |
|
注意事項 1.精度とは、複数回の測定値の間での互いのばらつきの小ささを示す尺度です。正確度とは、測定値が「真値」に近い値であることを示す尺度です。これらの値は標準的な実験環境で得られたものであり、実際の使用環境では異なる場合があります。 2.クラス 1 レーザー:投光器を長時間直視しないでください。詳しくはクラス1 レーザーの規格を参照してください。 3.屋外でスキャンする場合は、直射日光を避けてください。 4.警告:本製品に点滅するライトがあり、光過敏性てんかんの方には適さない場合があります。 5. MIRACO シリーズの 3D スキャナーは、スキャン時に PC を必要としません。ただし、MIRACO を Revo Scan(PC)に接続して追加の機能を使用する場合は、上記の PC 要件を満たす必要があります。 |
|