¶ 1. カメラ設定
高品質な3Dモデルを取得するためには、スキャン開始前にカメラの各種パラメータを適切に調整することが重要です。
Depthカメラ露出
ご注意:スキャン開始後、Depthカメラのプレビューウィンドウは自動的に非表示になります。再度表示する必要がある場合は、プレビューウィンドウ右上の  ボタンをクリックして手動で再表示してください。
ボタンをクリックして手動で再表示してください。
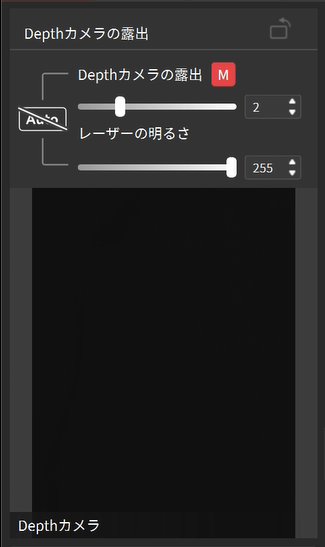
- 露出調整
Depthカメラの露出は、自動露出または手動で調整できます。 初期設定の値を使用することを推奨します。 手動で調整する場合は、Depthカメラのウィンドウ上にレーザーラインがはっきりと見えるように設定してください。
- レーザーの明るさ
スキャンの精度や品質に影響を与えないよう、初期設定の値を使用することを推奨します。
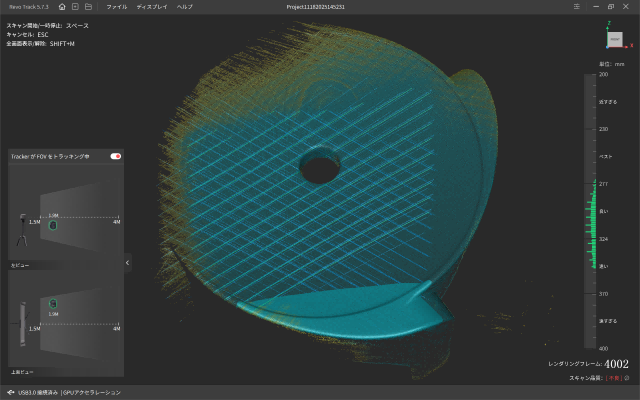
Trackerの視野角

トラッキングスキャンまたはマルチポジションスキャンモードを使用する際には、左側面図および上面図から見たTrackerのトラッキング視野角が表示されます。トラッキングミスを防ぐために、スキャン中はScannerを常にTrackerの視野内に保ってください。
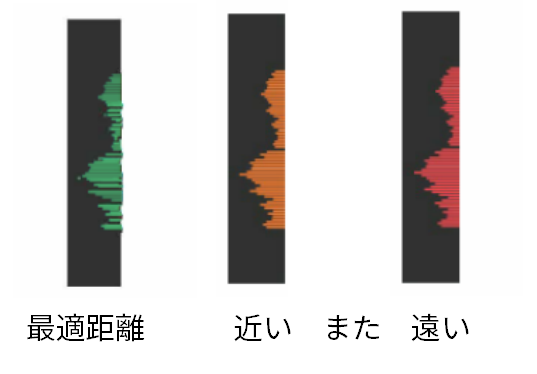
¶ 2. スキャン距離インジケーターバー

距離インジケータバーは、対象物とスキャナー間の距離を示します。新しいスキャンの前にスキャン距離を調整します。バーが緑色(ベスト)になったらスキャンを開始することをお勧めします。
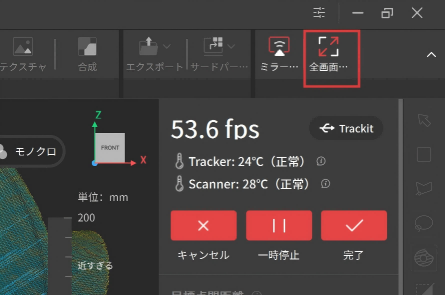
¶ 3. スキャナー情報
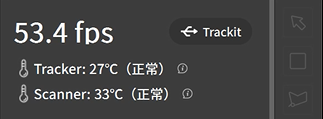
デバイス名、リアルタイムのフレームレート、およびデバイスの温度が表示されます。
温度が高すぎるまたは低すぎる場合は(前回のキャリブレーション温度の上下 3°C を超える)、スキャンを行う前に約30分間稼働させたままにして、再キャリブレーションを行ってください。
¶ 4. スキャンコントロール
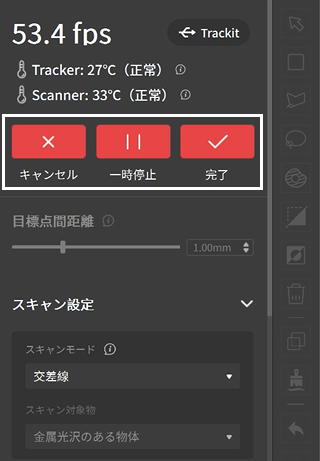
 : クリックすると、すべての取得データが削除されます。
: クリックすると、すべての取得データが削除されます。
 /
/
 :
クリックすると、スキャンの開始または一時停止を行います。
:
クリックすると、スキャンの開始または一時停止を行います。
 : スキャンが完了したら、これをクリックして編集に進みます。
: スキャンが完了したら、これをクリックして編集に進みます。
¶ 5. 目標点間距離

目標点間距離とは、スキャン中に生成される点群の隣接する点同士の間隔を指し、スキャン前に必要に応じて設定できます。値を小さくするほどモデルはより詳細になりますが、その分スキャンに時間がかかります。
¶ 6. スキャンモード
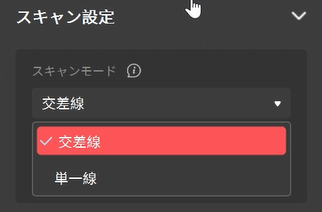
スキャンを開始する前に、適切なスキャンモードを選択してください。
¶ 7. トラッキングモード

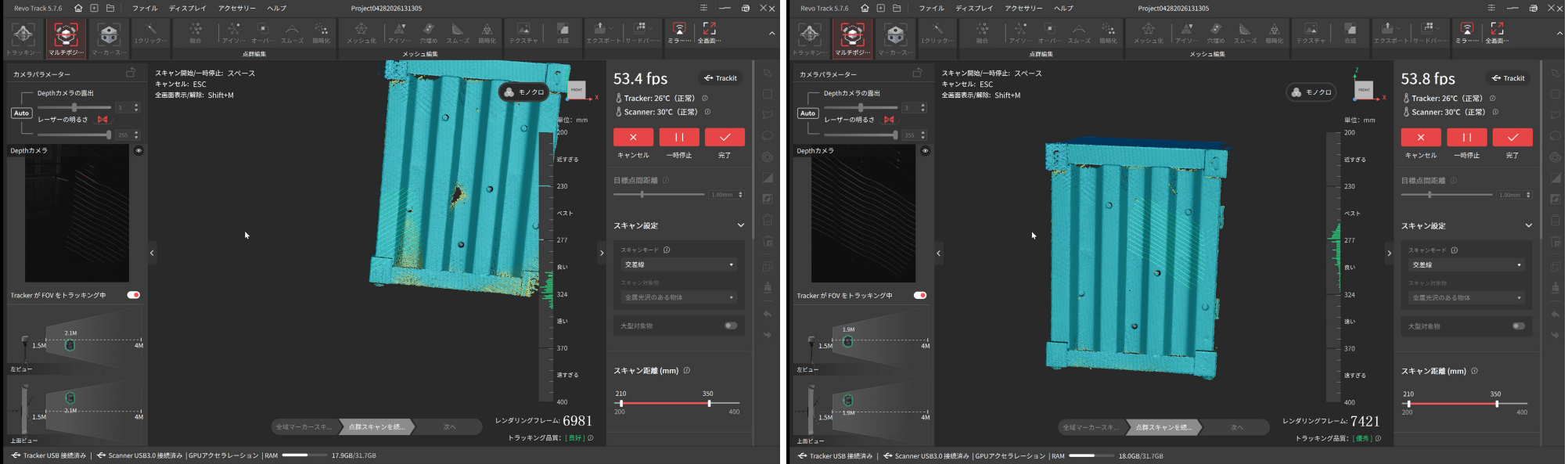
スキャン前に、対象物の特性やスキャンの目的に応じて、3つのスキャンモードのいずれかを選択してください。
- トラッキングスキャン: Scannerの位置と角度をリアルタイムでトラッキングすることで、マーカーを使用せずにスキャンを行います。中小型の物体を素早くスキャンするのに適しています。スキャン中は、Trackerと対象物を動かさないようにしてください。
- マルチポジションスキャン: 自動車や産業用部品などの大型オブジェクトのスキャンに最適です。スキャンを開始する前に、対象物を複数のスキャンエリアに分割してください。各エリアをスキャンする際は、まずTrackerを移動させ、全域マーカーを取得し、その後に点群データをキャプチャします。
- マーカースキャン: Scannerは単体の3Dスキャナーとしても使用できますが、スキャンを正確に行うには対象物にマーカーを配置する必要があります。中小型の物体のスキャンに適しています。
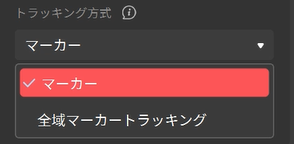
マーカースキャンを使用する際、トラッキングモードは「マーカートラッキング」または「全域マーカートラッキング」のいずれかに設定できます。
* 全域マーカートラッキングは、より正確なスキャン結果と滑らかなフレームの連結を実現します。手順は2段階です。まずマーカーをスキャンして全域マーカーの座標を作成し、次にこれらの座標を基に対象物をスキャンします。
¶ 8. スキャン対象物
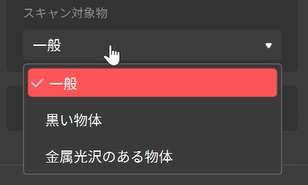
- 一般: 一般的な物体のスキャンに適しています。対象物が以下の他のタイプに該当しない場合は、このタイプを選択してください。
- 黒い物体: 表面が暗い物体(たとえば、黒や濃い灰色の衣服など)のスキャンに適しています。
- 金属光沢のある物体: アルミニウム、スチール、銅など、光を反射する金属表面を持つ物体のスキャンに適しています。(ご注意:光沢のある黒い表面のオブジェクトをスキャンする場合は、「黒い物体」を選択してください。)
¶ 9. 薄肉対象物

- トラキングスキャンモードでこの機能を有効にすると、薄肉部やエッジを持つ対象物のスキャン結果を最適化できます。
¶ 10. 大型対象物

- この機能を有効にすると、大型対象物のスキャン結果を最適化できます。
¶ 11. 振動検出

振動検出は、より高いスキャン精度が求められる用途向けに設計された機能です。固定されたアンカーブロックを基準として使用することで、精度低下を防ぎます。コード化マーカーブロックは対象物の近くに配置し、Trackerの視野内に収め、スキャン中は静止した状態を維持する必要があります。Trackerまたは対象物が動いた場合、あるいはスキャン環境で振動が発生した場合、ソフトウェア画面に振動警告が表示されます。表示された案内に基づき、スキャンを再開するかどうかを判断できます。
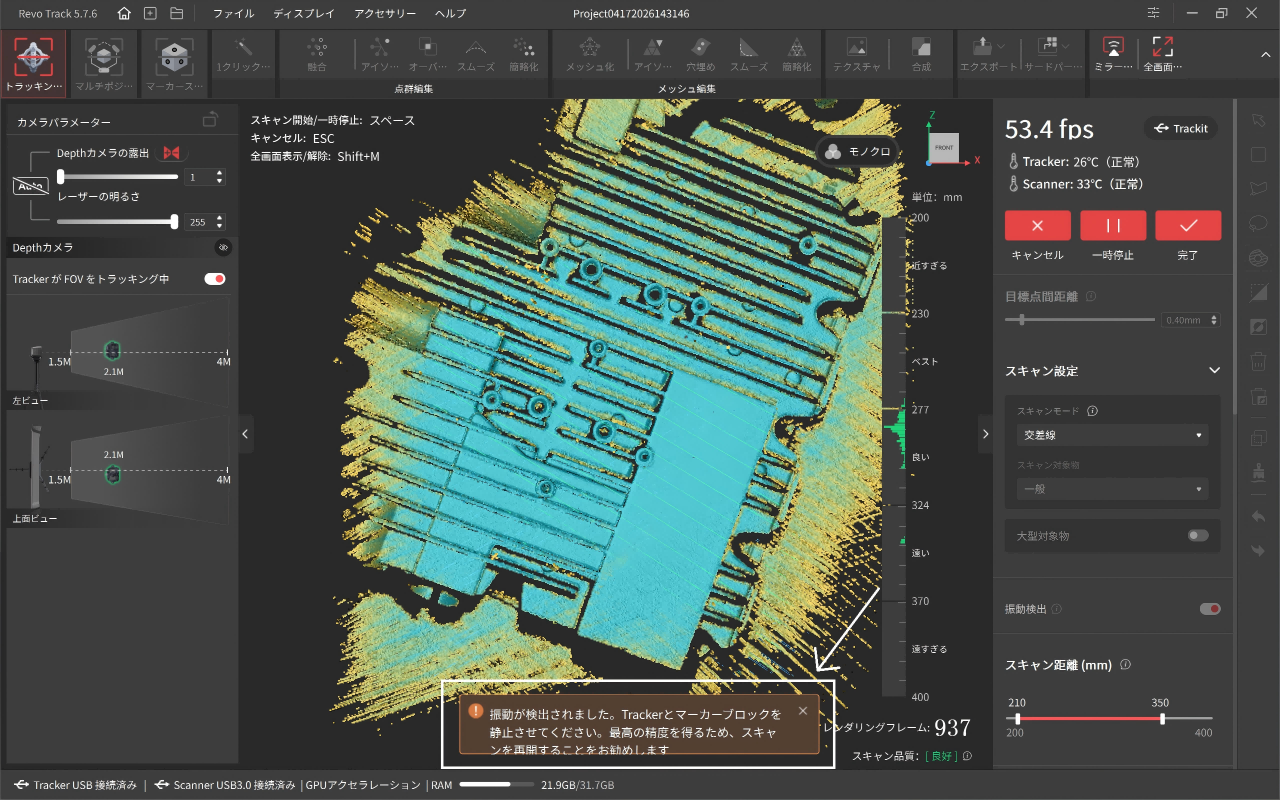
¶ 12. スキャン距離
スライダーを使って深度カメラの作動距離を調整し、不要な背景や前景のオブジェクトを除外できます。最小距離と最大距離の両方を設定可能です。
¶ 13. トラッキング品質
レンダリングフレーム:リアルタイムでキャプチャされた総フレーム数を表示します。
TrackerとScannerの距離:スキャン中に、TrackerとScannerの間の距離がリアルタイムで表示されます。
スキャン品質:トラッキングスキャンまたはマルチポジションスキャン時のスキャン品質を示します。正確なスキャン結果を得るために、スキャン品質を「良好」または「優秀」に調整できるよう、ScannerをTrackerに近づけたり遠ざけたりしてください。品質が「不良」と表示された場合は、スキャン前にデバイスのキャリブレーションを行ってください。
¶ 14. スキャン品質
スキャン中、データが取得されるにつれて点群は赤から青へと変化します。青は高いスキャン品質を示しているため、同じ箇所を異なる角度からスキャンするのが理想的です。モデル全体がほとんど青になった段階で、スキャンを終了するのが良いでしょう。
¶ 15. 全画面表示
全画面表示 タブバー右側の「全画面」ボタンをクリックすると、全画面表示に切り替わります。
ショートカットキー「Shift + M」で全画面表示を終了します。
¶ 16. スキャン設定の保存/インポート
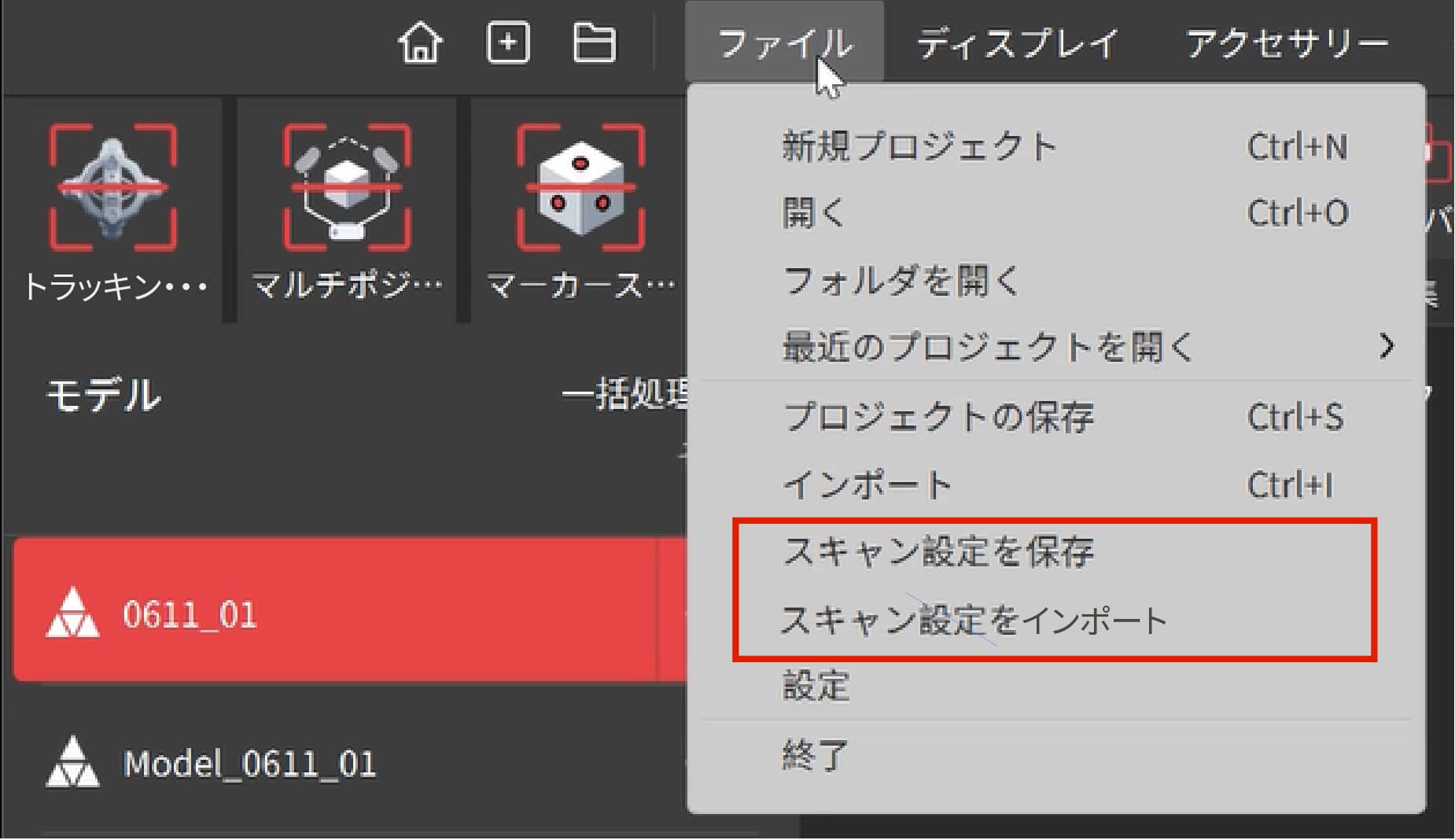
メニューバーで、[ファイル ] > [スキャン設定を保存 ]を選択し、名前を付け、保存場所を選択します。または、[スキャン設定をインポート ]をクリックし、必要な設定を含むファイルを選択し、[開く ]をクリックします。
ご注意:現在接続されているスキャナーのスキャン設定のみをインポートできます。