¶ 1. トラッキングスキャン
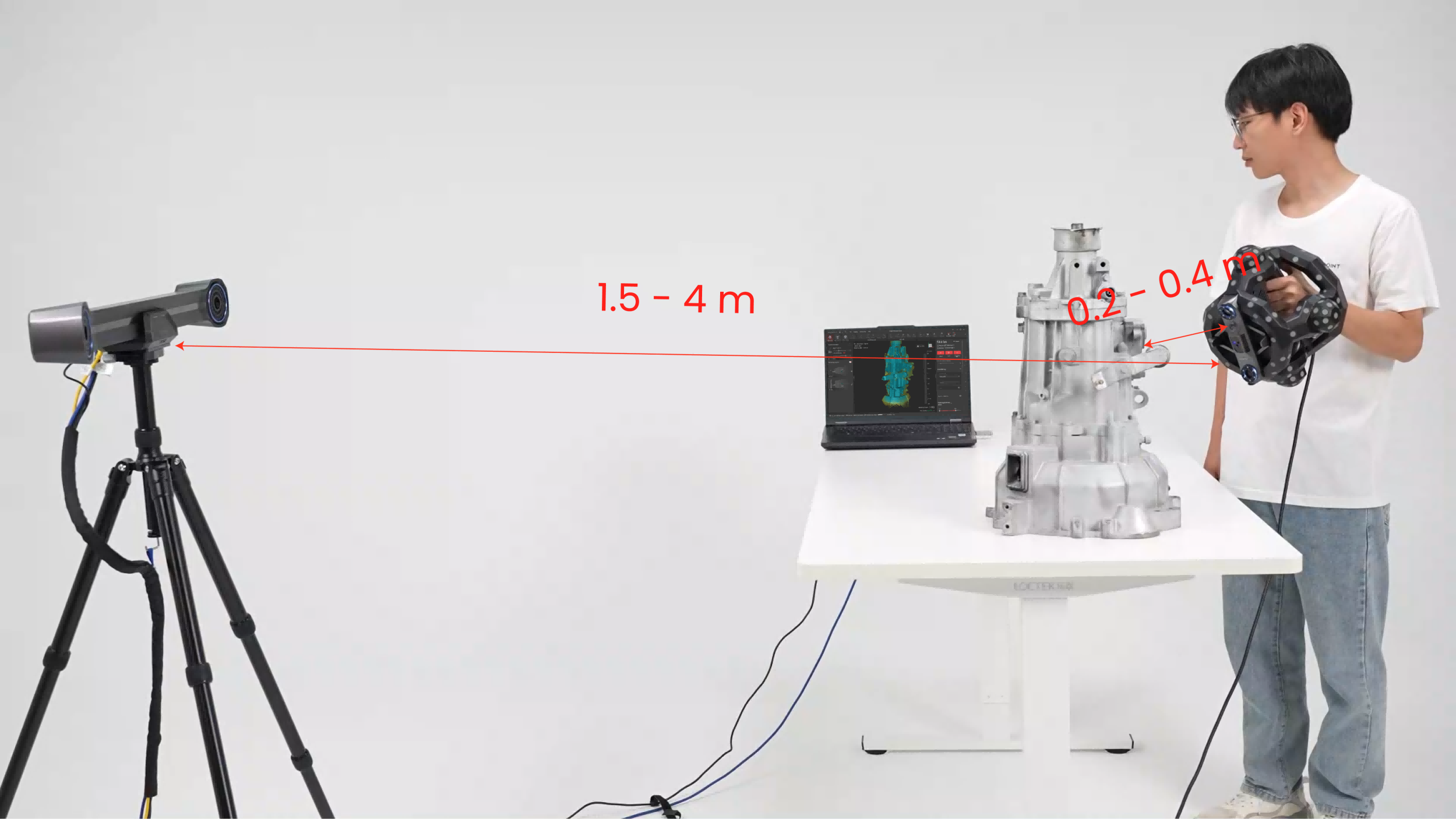
Scannerの位置と角度をリアルタイムで追跡することで、マーカーなしでスキャンを行います。スキャン中はTrackerと対象物が動かないようにする必要があり、中小型の物体を素早くスキャンするのに適しています。
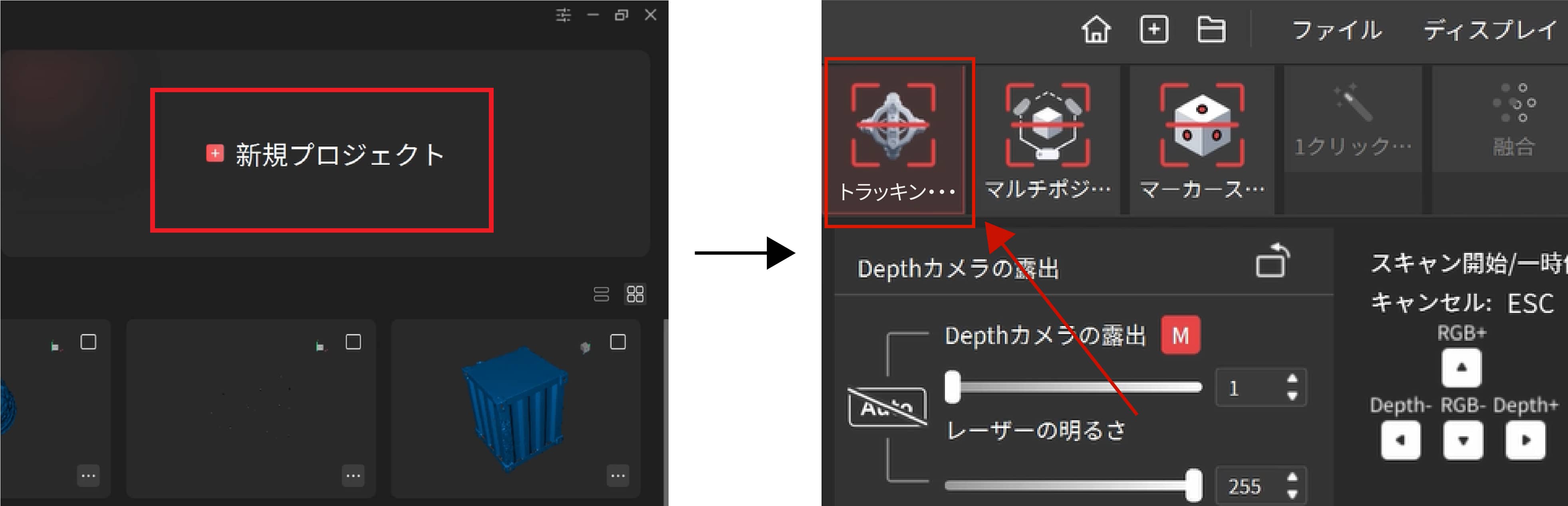
スキャナーを接続した後、Revo Trackのホーム画面で「新規プロジェクト」ボタンをクリックしてプロジェクト画面に入ります。「トラッキングスキャン」を選択してください。
トラッキングスキャンを行うには、以下の手順に従ってください:
※ 実際のRevo Trackのインターフェースをご参照ください。
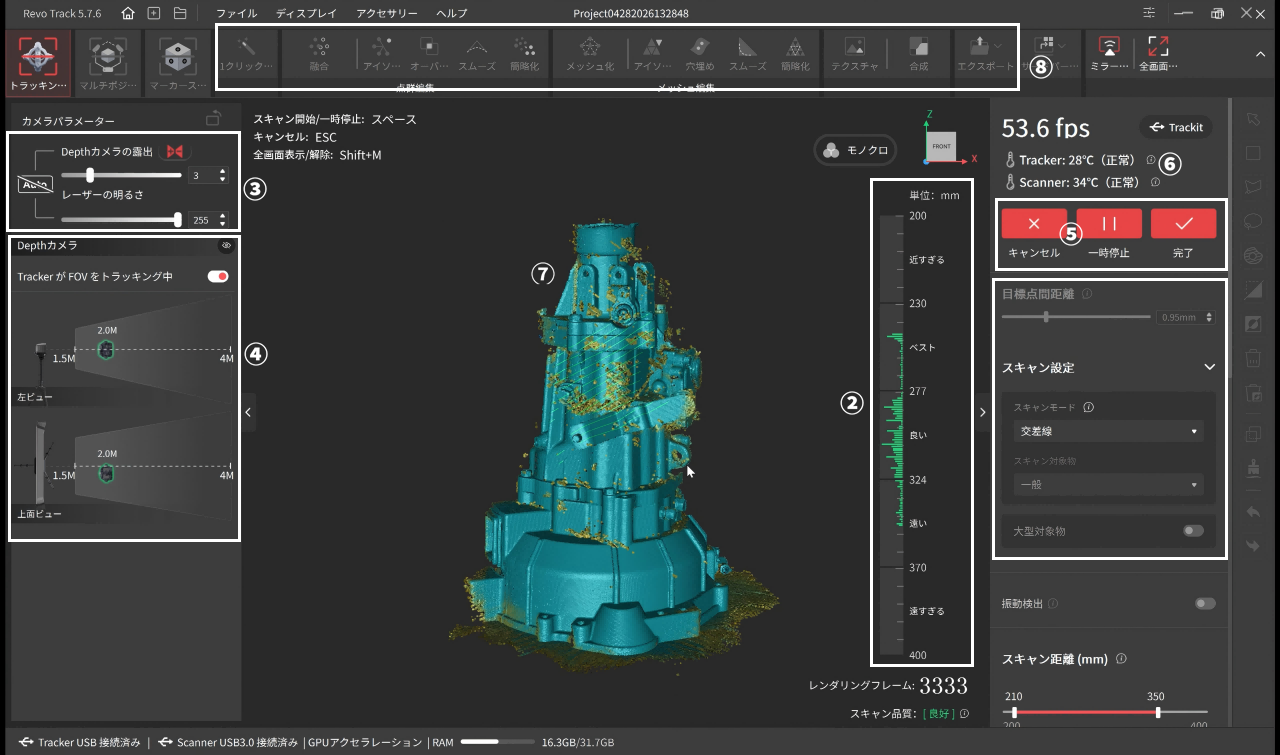
① スキャン設定で、スキャンモード、対象物を選択し、必要に応じて目標点間距離を設定します。
② Scannerを対象物に近づけたり遠ざけたりして、スキャン距離インジケーターが「ベスト」または「良い」を示すように調整します。
③ Autoボタンをクリックして、深度カメラの露出を自動で設定します。または、自動露出をオフにして、スライダーをドラッグしながら調整し、深度カメラのプレビューウィンドウでレーザーラインがはっきり見えるようにします。
ご注意:スキャン開始後、Depthカメラのプレビューウィンドウは自動的に非表示になります。再度表示する必要がある場合は、プレビューウィンドウ右上の  ボタンをクリックして手動で再表示してください。
ボタンをクリックして手動で再表示してください。
④ ScannerとTrackerの距離を調整し、Scannerが常にTrackerの視野(FOV)内に収まるようにしてください。
⑤  ボタンをクリックしてスキャンを開始します。スキャン中はScannerを対象物に向けてください。距離インジケーターを参照し、「ベスト」または「良い」を示すように調整します。Scannerを同じ箇所の上に数秒間安定して保持し、モデルの表面が完全に青になるのを待ちます。その後、次のエリアにゆっくりと安定して移動してください。スキャン中いつでも
ボタンをクリックしてスキャンを開始します。スキャン中はScannerを対象物に向けてください。距離インジケーターを参照し、「ベスト」または「良い」を示すように調整します。Scannerを同じ箇所の上に数秒間安定して保持し、モデルの表面が完全に青になるのを待ちます。その後、次のエリアにゆっくりと安定して移動してください。スキャン中いつでも ボタンをクリックして、モデルを確認できます。モデルが不完全な場合は、ボタンをクリックしてスキャンを再開してください。
ボタンをクリックして、モデルを確認できます。モデルが不完全な場合は、ボタンをクリックしてスキャンを再開してください。
- スキャン中は、Trackerのカメラを遮らないようにし、Trackerから対象物とScanner上のマーカーがはっきり見えるようにしてください。
- スキャナーが対象物のみを捉えるように心がけてください。スキャンが進むにつれて、点群は赤から青へと変化します。点群が完全に青になると、高品質な点群が取得できていることを示します。
⑥ モデルが完成したら、 ボタンをクリックしてスキャンを終了します。
ボタンをクリックしてスキャンを終了します。
⑦ ワンクリック編集をクリックすると、モデルが自動的に処理されます。より詳細なモデルが必要な場合は、「融合」や「メッシュ設定」などのツールを使用して手動で編集することもできます。点群の融合を手動で行う場合は、システムが推奨する点間距離を使用することをお勧めします。点間距離を非常に小さく設定すると、処理時間が長くなる可能性があります。詳細については、モデル編集章をご参照ください。
⑧ 後処理が完了したら、モデルを PLY、OBJ、STL などの形式でエクスポートします。
¶ 2. マルチポジションスキャン
大型の物体(自動車や産業用部品など)のスキャンに適しています。スキャン対象を複数のスキャンエリアに分割し、それぞれのエリアを順番にスキャンしていきます。各スキャンのたびにTrackerを新しい位置に移動させ、まず全域マーカーを取得し、その後に点群データを取得してください。
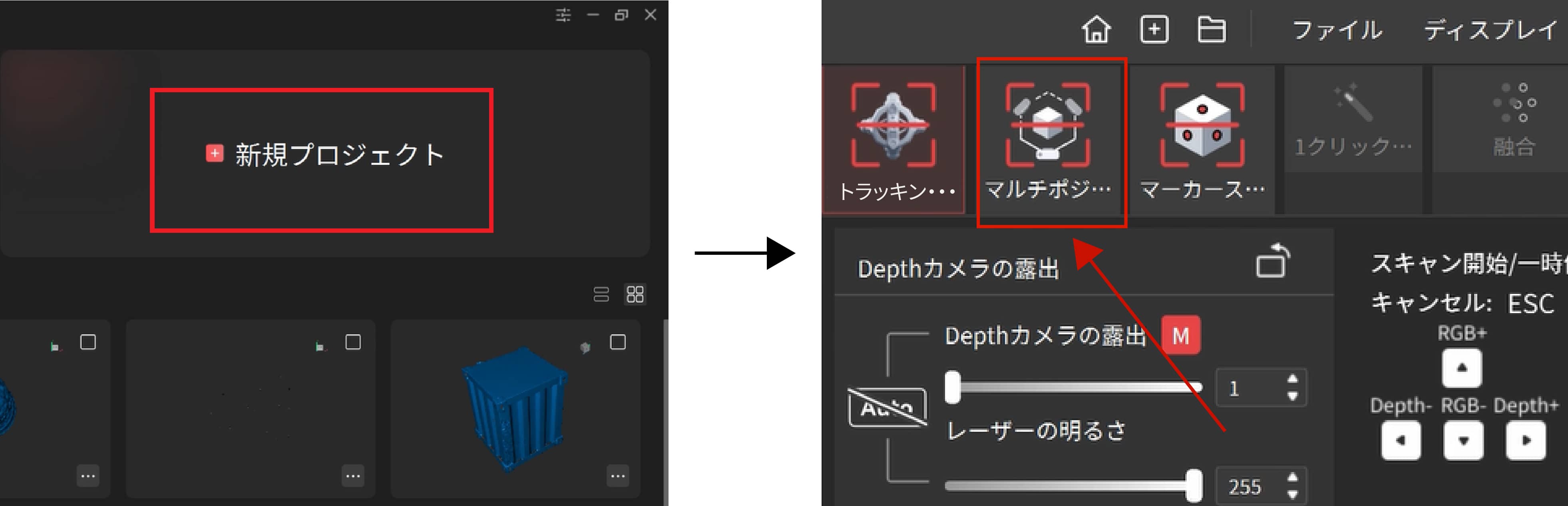
スキャナーを接続した後、ソフトウェアのホーム画面で「新規プロジェクト」をクリックし、プロジェクトページに進みます。「マルチポジションスキャン」を選択し、以下の手順に従ってスキャンを開始してください。
¶ 1) 最初のエリアを設定
最初のエリアを選び、対象物の表面にマーカーを少なくとも5個、約20cmの間隔で配置します。Trackerを開始点に向け、マーカーが認識できるように距離と高さを調整してください。

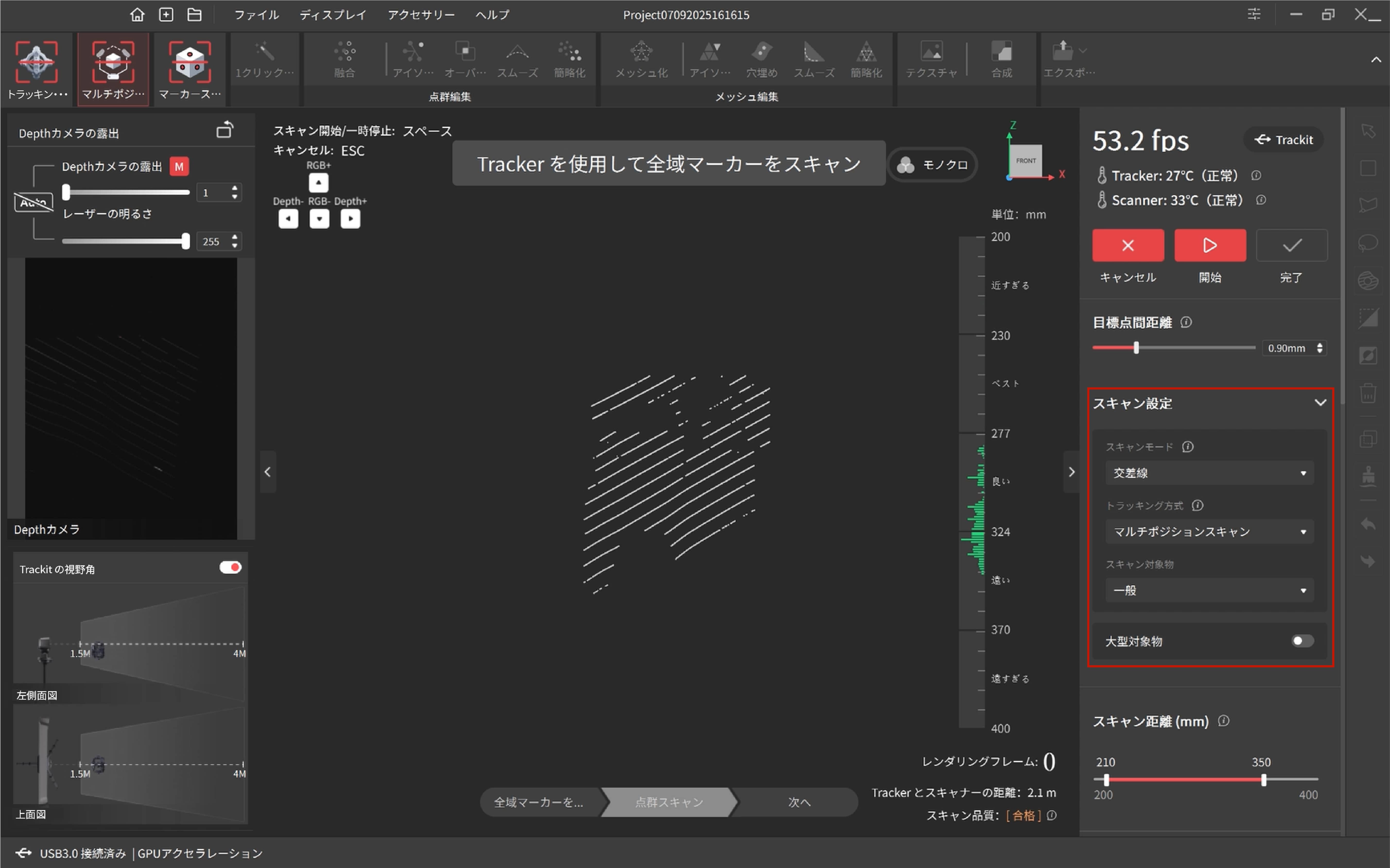
¶ 2) 最初のエリアの全域マーカーをスキャン
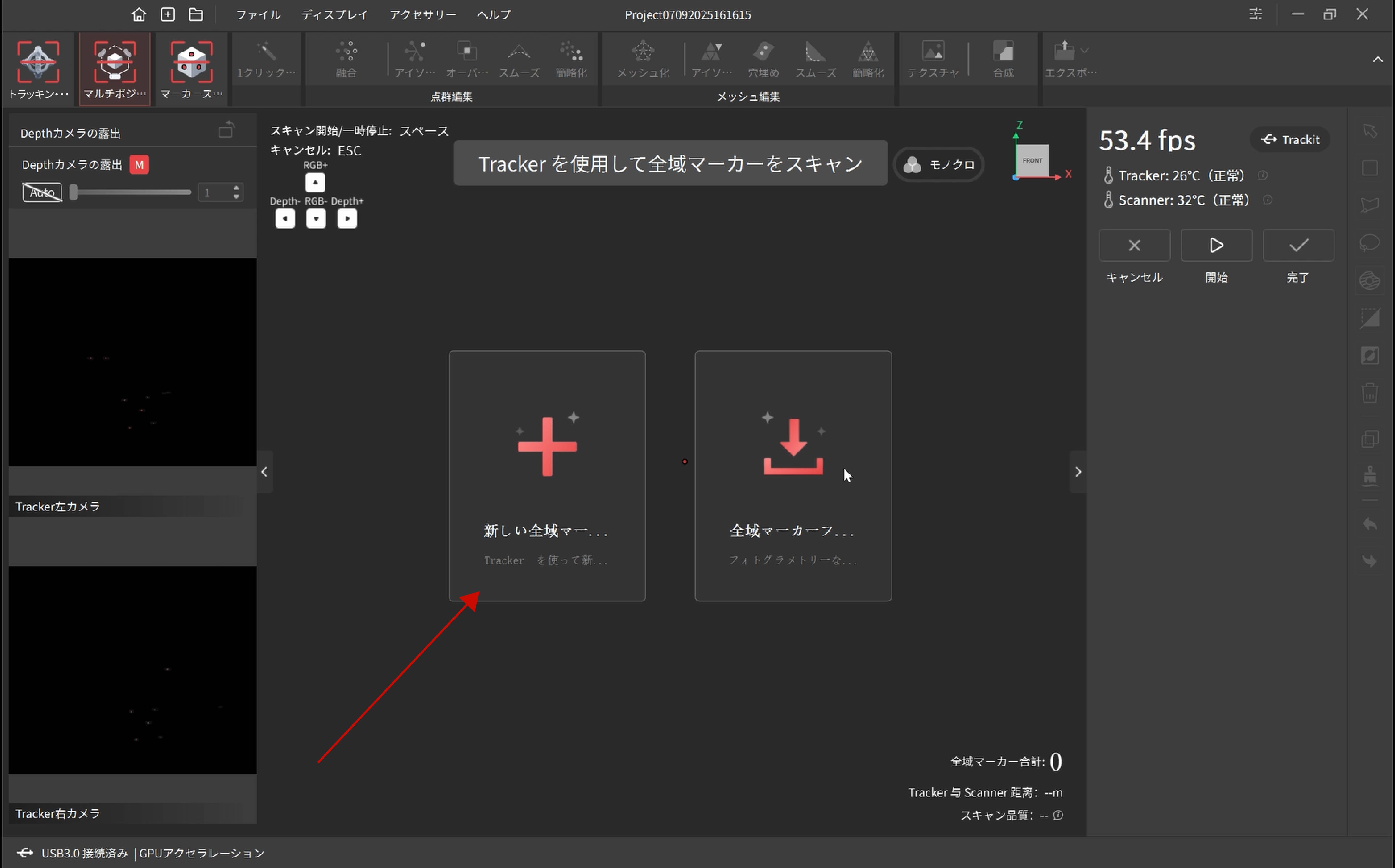
全域マーカーをスキャンする際は、ScannerがTrackerの視野に入らないようにし、対象物上のマーカーのみがキャプチャされるようにしてください。

「新しい全域マーカーを作成」ボタンをクリックして、マーカーをキャプチャします。
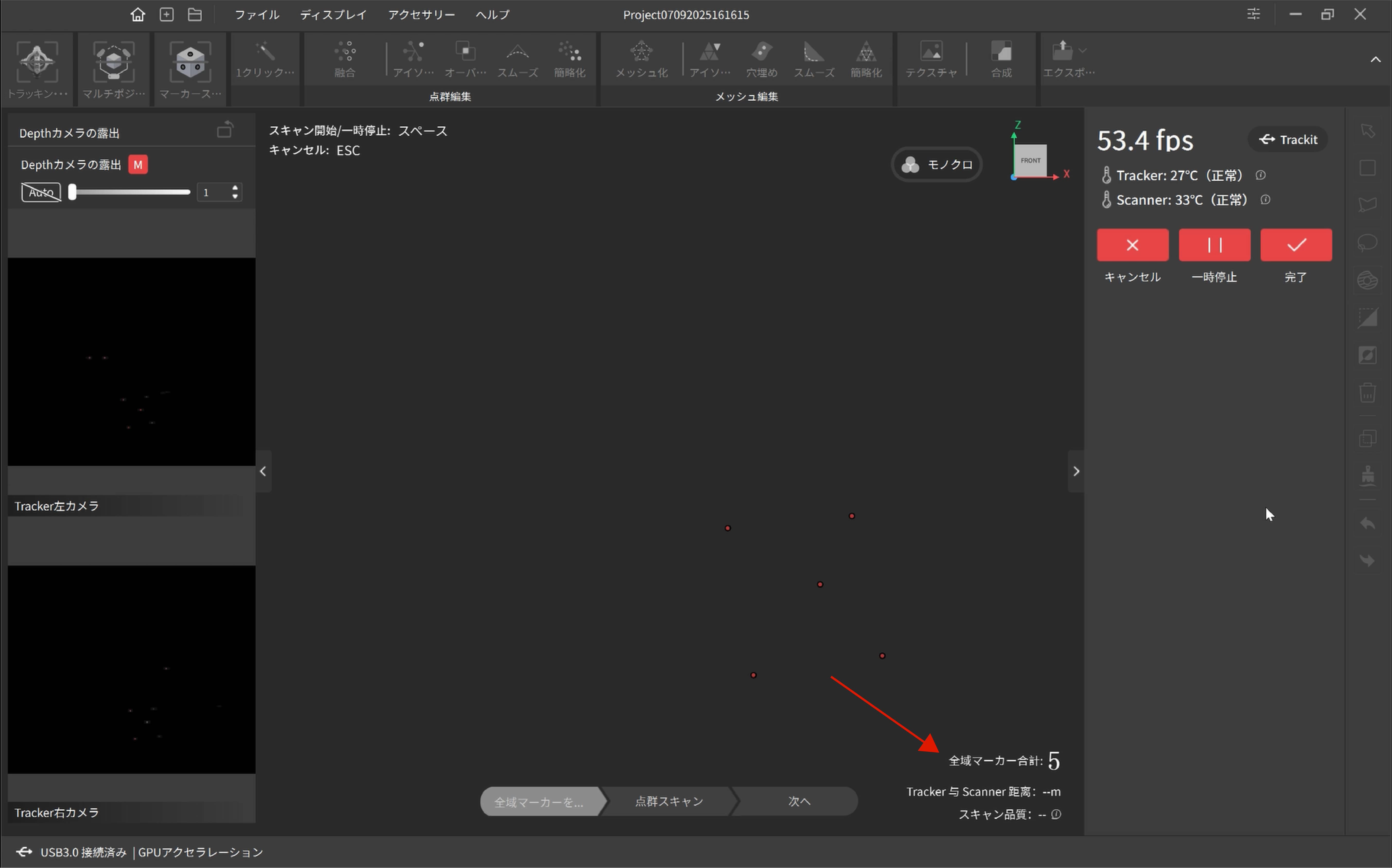
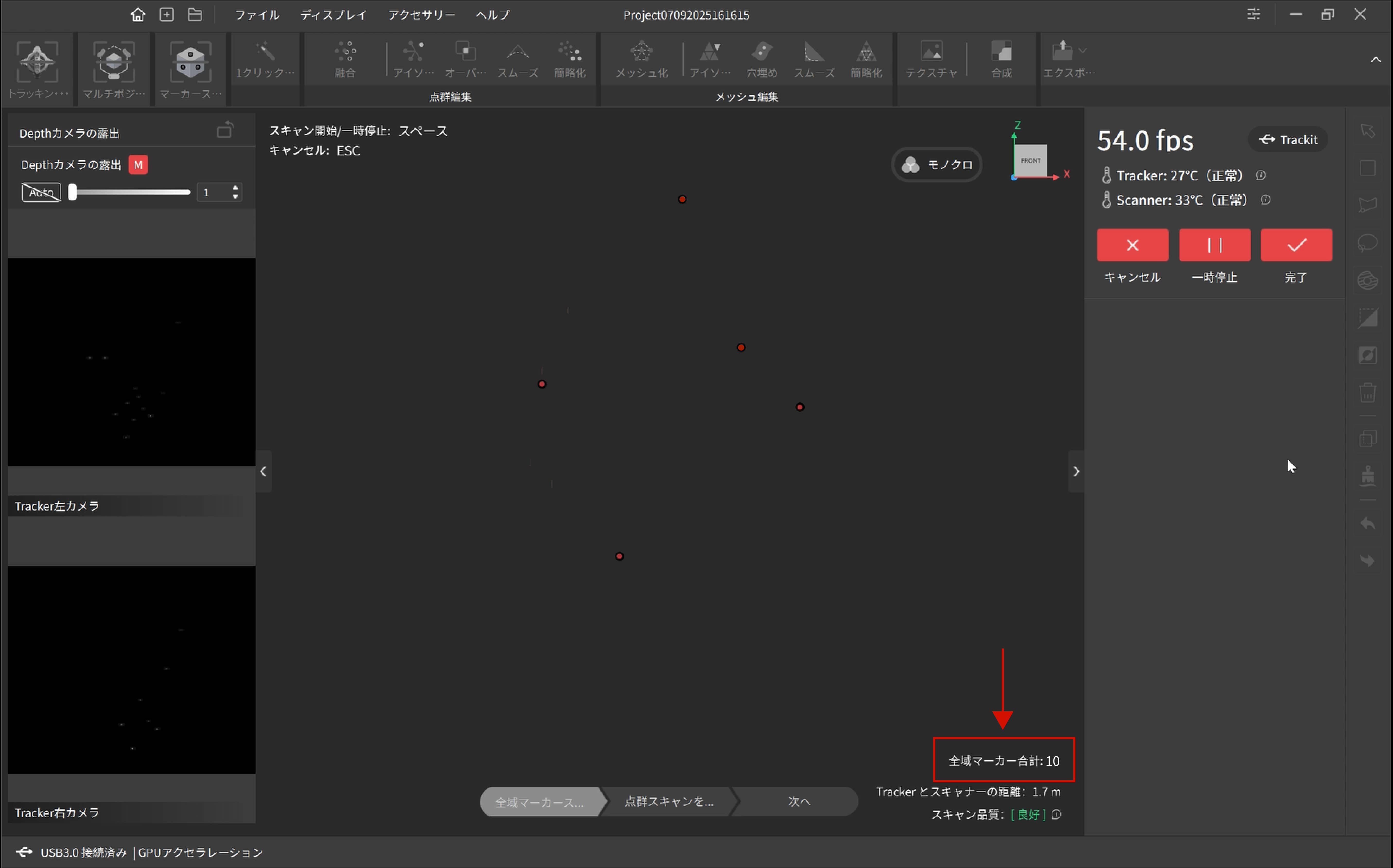
「開始」ボタンをクリックしてTrackerで全域マーカーをキャプチャします。スキャン中は、キャプチャされた全域マーカーの総数が画面右下に表示されます。
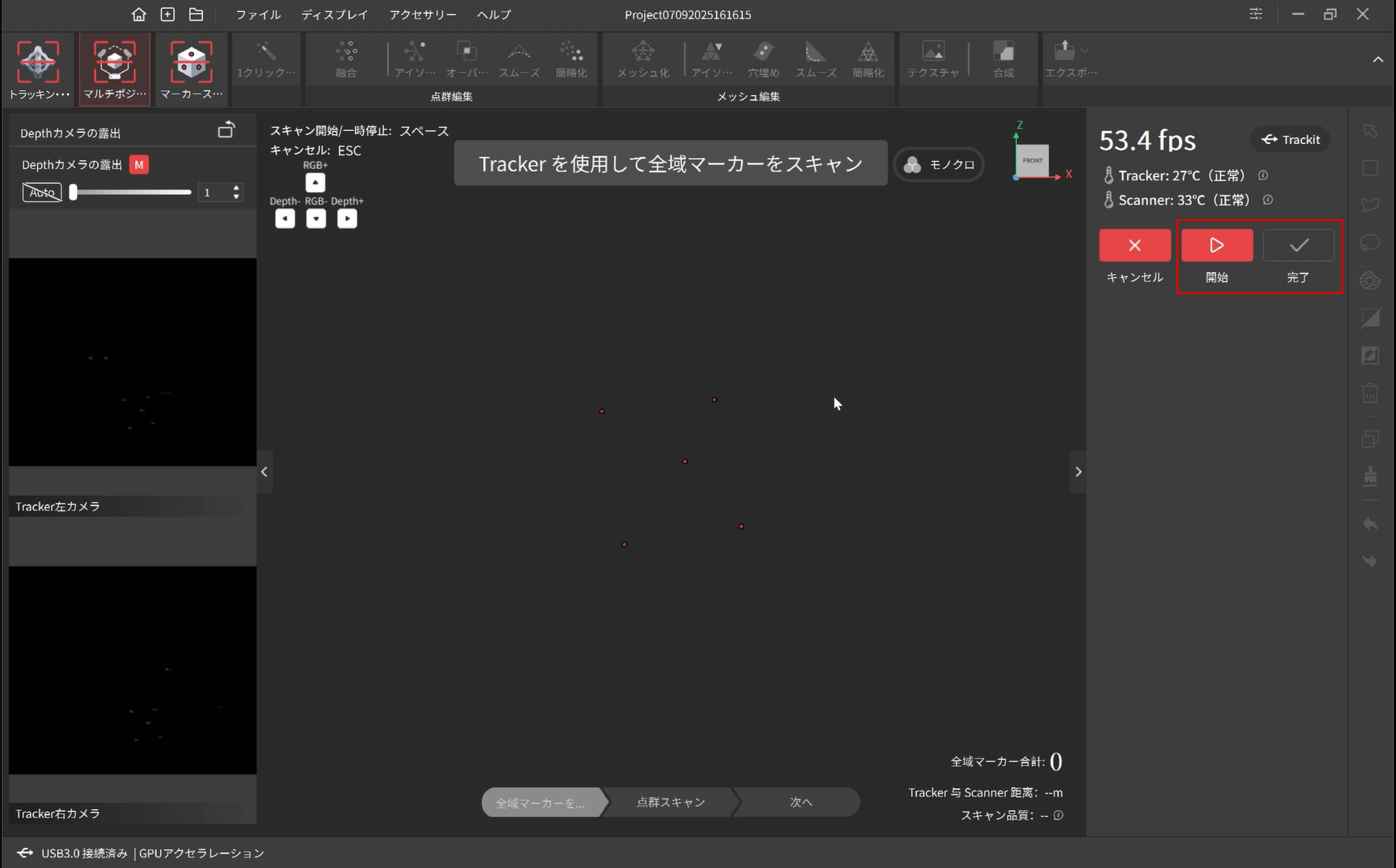
5個またはそれ以上のマーカーが認識されたら、「完了」ボタンをクリックして終了します。
¶ 3) 最初のエリアの点群をスキャン
点群スキャンボタンをクリックします。
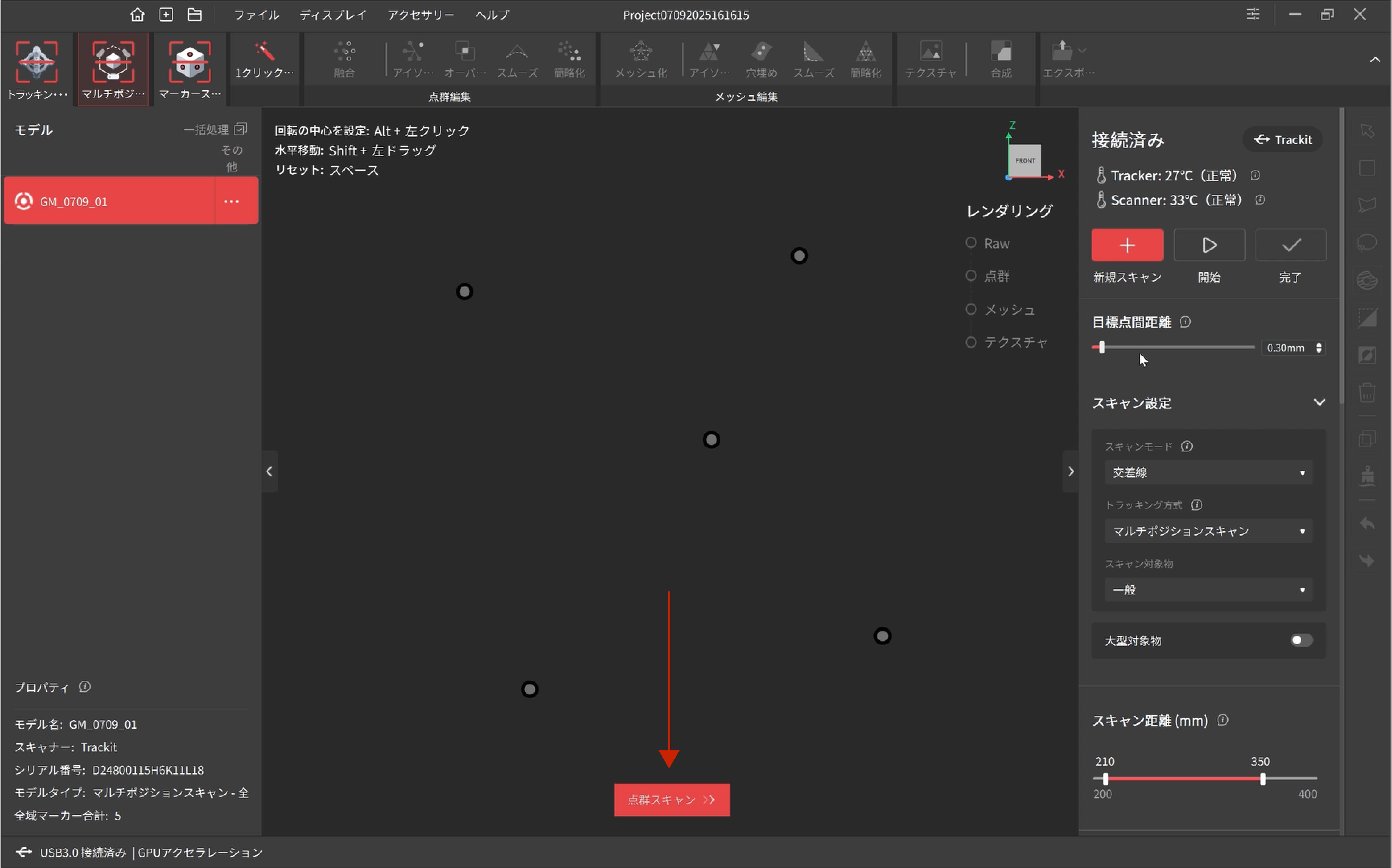
スキャン設定で、スキャンモード、対象物の種類を選択し、必要に応じて目標点間距離を設定します。その後、「開始」ボタンをクリックして点群をキャプチャします。
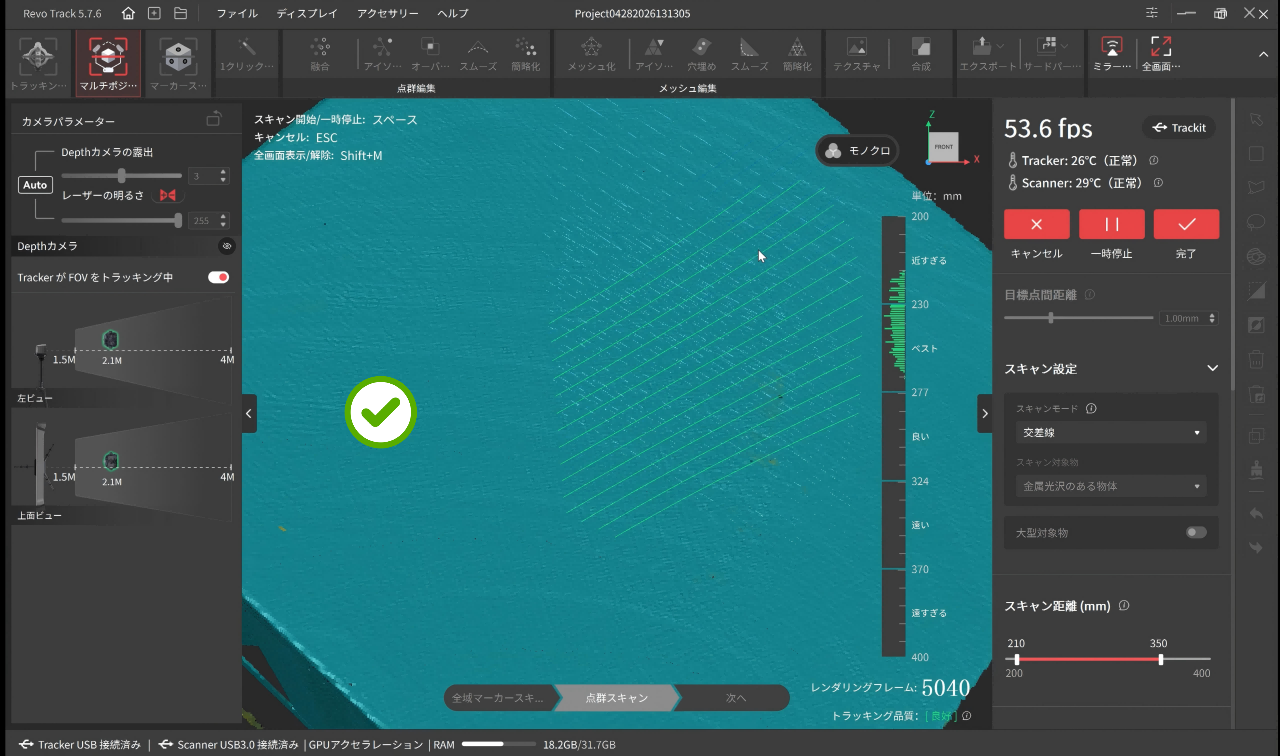
スキャナーを持ち、ゆっくりと安定した動きで最初のエリアの点群をキャプチャします。スキャン中は、キャプチャされたマーカーのうち少なくとも5個が常にTrackerから見えるようにしてください。
スキャン中はTrackerの視野角や対象物のマーカーを遮らないようにしてください。TrackerがScannerと対象物のマーカーの両方をしっかり認識できるようにしてください。

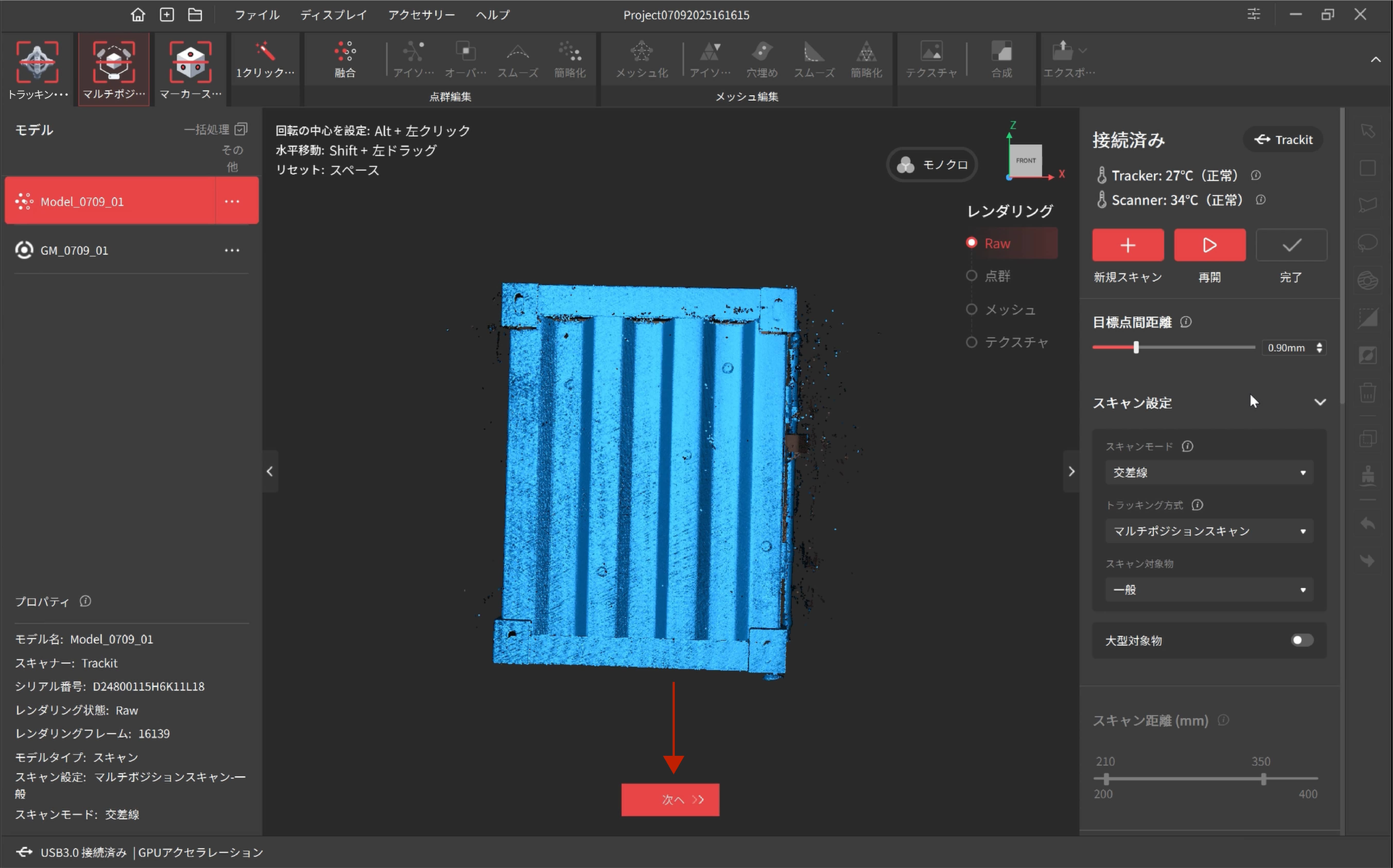
スキャン中は、点群の色が赤から青に変わっていきます。点群が完全に青になるほど高品質なデータを取得できていることを示すため、終了する前にモデルがほぼ青になっていることを確認してください。
¶ 4) 次のエリアを設定
次のエリアを設定し、対象物の表面にアンカーブロックまたはマーカーを少なくとも5個配置してください。なお、最初のエリアのアンカーブロックがTrackerのトラッキング参照になるため、最初のエリアのアンカーブロックを取り外さないでください。

¶ 5) Trackerを次のエリアに移動
「次のステーションへ」ボタンをクリックして、次のステーションの画面に進みます。
Trackerをゆっくりと安定した動きで開始位置から次のエリアへ移動させてください。Trackerが常に5つのマーカーを認識できるようにしてください。
右下に表示されるマーカーの合計数を確認してください。表示された合計が両エリアのマーカー数と一致したら、[完了]ボタンをクリックしてください。
¶ 6) 次のエリアの点群データをスキャン
[点群スキャンを続行]ボタンをクリックして、次のエリアの点群を取得してください。
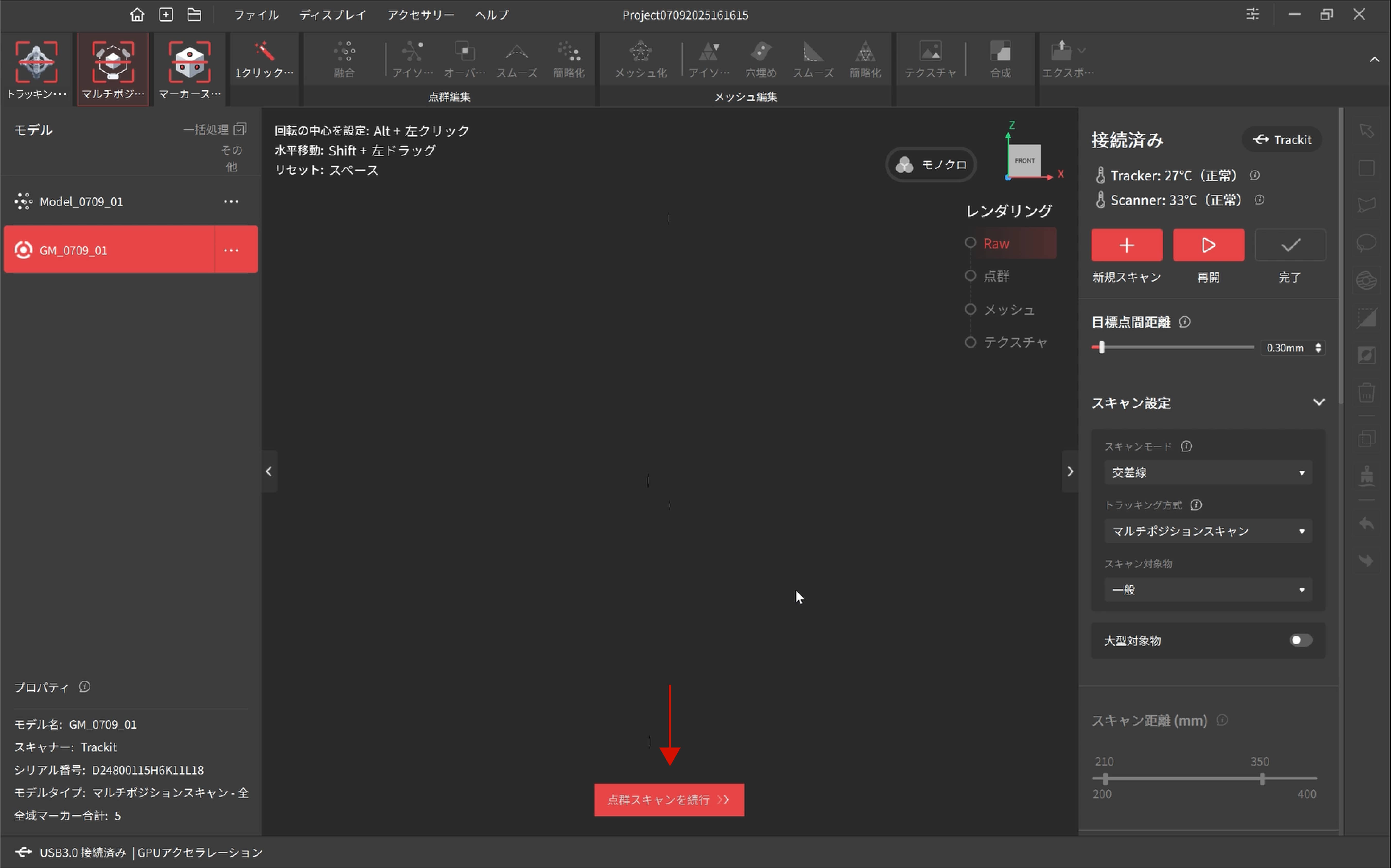
続いてScannerを持ち、ゆっくり安定して動かしながら、次のエリアの点群をスキャンしてください。
スキャン中は、Trackerの視野角や対象物上のマーカーを遮らないようにしてください。Scannerおよびマーカーが常にTrackerから見えるできる状態を保ってください。

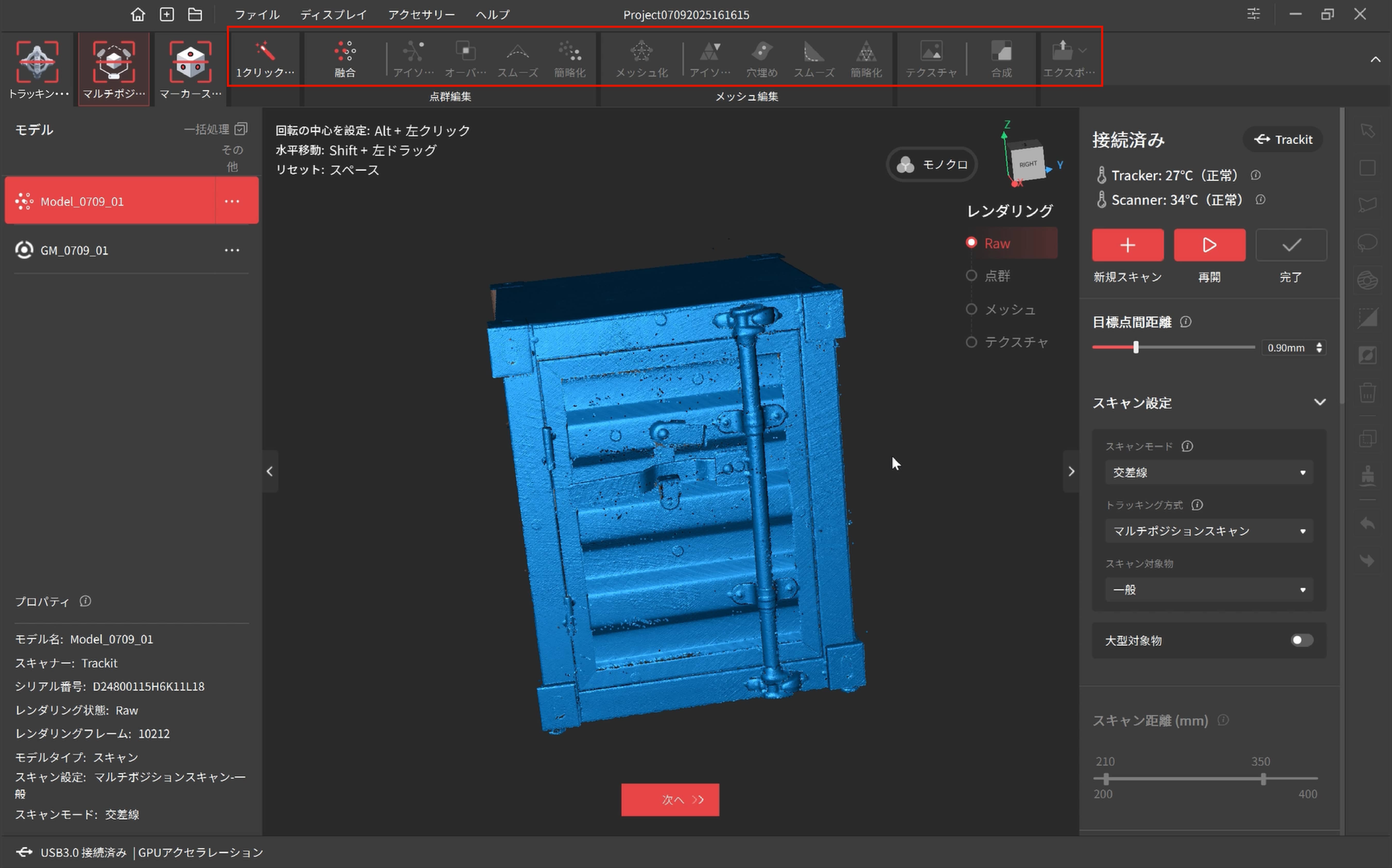
モデルの表面全体が青になったら、[完了]ボタンをクリックしてください。
变蓝.png)
¶ 7) 次のエリアをスキャン
スキャンが完了していない場合は、ステップ5と6を繰り返して、対象物の表面全体をスキャンしてください。
¶ 8) モデルを処理
[ワンクリック編集]をクリックすると、モデルを自動で処理できます。より詳細なモデルが必要な場合は、融合やメッシュ化、およびその他のツールを使って手動で編集してください。点群の融合を手動で処理する場合は、システム推奨の点間距離を使用することをおすすめします。非常に小さい点間距離を設定すると、計算時間が長くなるためご注意ください。詳しくはモデル編集章をご参照ください。
¶ 9) モデルをエクスポート
後処理が完了したら、モデルをPLY、OBJ、STLなどの形式でエクスポートしてください。
¶ 3. マーカースキャン
Scannerは、単体でも3Dスキャナーとして使用できますが、正確なスキャンを行うには対象物にマーカーを配置する必要があります。中小型の対象物のスキャンに適しています。
スキャンを始める前に、対象物の表面や周囲にマーカーブロックを配置するなどして、1フレームあたり少なくとも5個のマーカーが認識されるよう、約6cm間隔でマーカーを配置し、マーカーが豊富な環境を整えてください。

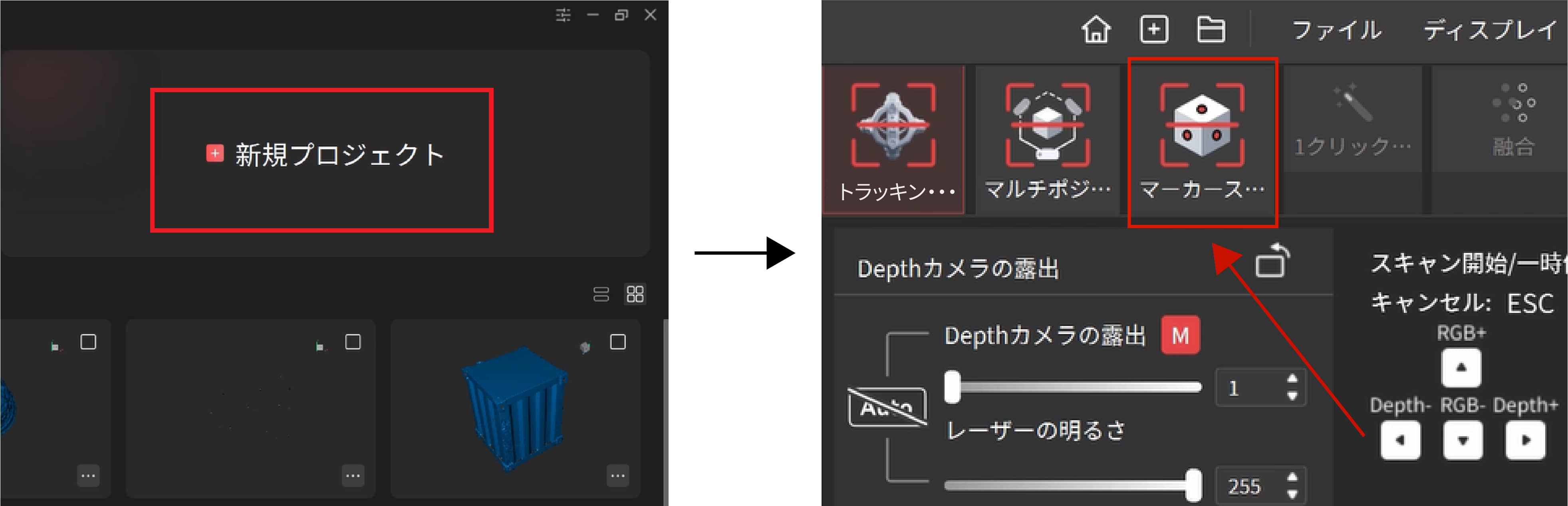
Scannerを接続したら、Revo Trackのホーム画面で[新規プロジェクト]ボタンをクリックしてプロジェクト画面に進みます。次に[マーカースキャン]を選択してください。
以下の手順に従って、マーカースキャンを開始してください。
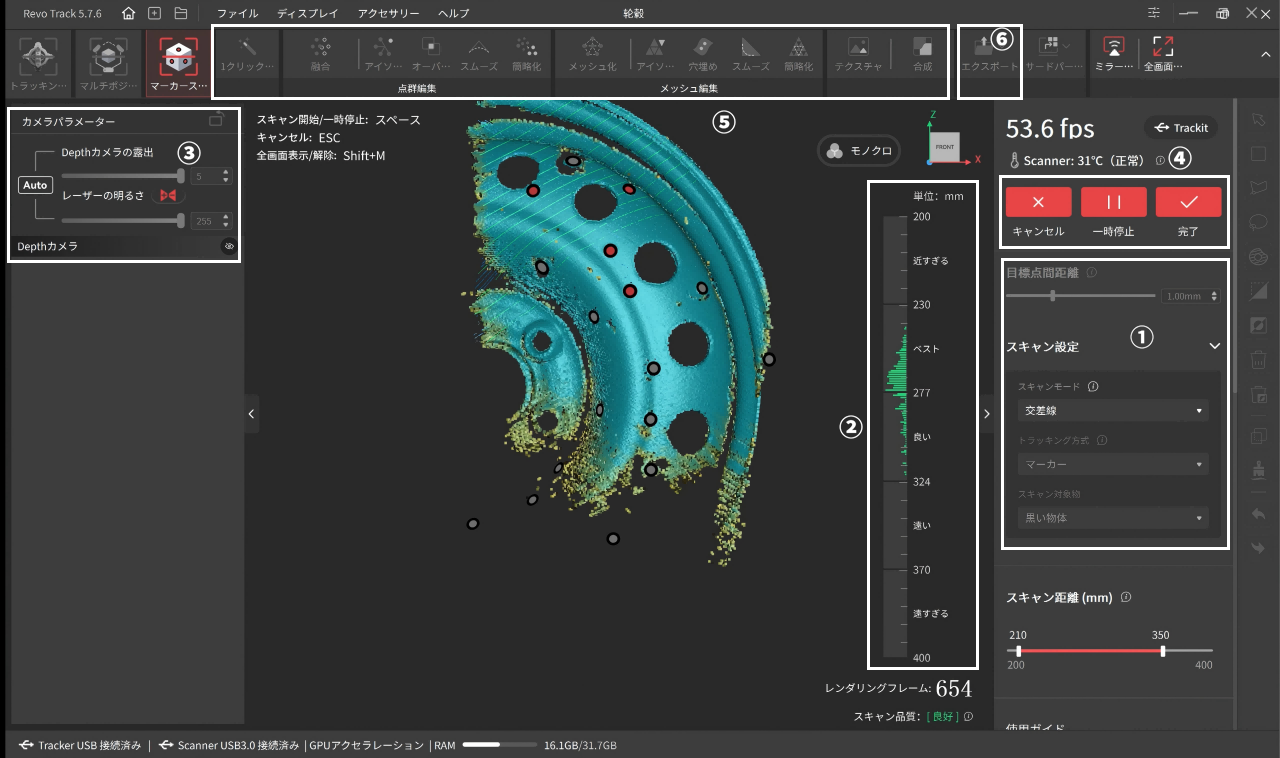
① スキャン設定で、スキャンモード、対象物を選択し、必要に応じて目標点間距離を設定します。
② スキャナーを対象物に近づけたり離したりして、スキャン距離インジケーターが「ベスト」または「良い」になる位置に調整してください。
③ Autoボタンをクリックすると、深度カメラの露出が自動で設定されます。自動露出をオフにする場合は、スライダーをドラッグして調整し、プレビュー画面でレーザーラインがはっきり見えるようにしてください。
ご注意:スキャン開始後、Depthカメラのプレビューウィンドウは自動的に非表示になります。再度表示する必要がある場合は、プレビューウィンドウ右上の ボタンをクリックして手動で再表示してください。
④ ボタンをクリックしてスキャンを開始します。スキャン中はScannerを対象物に向け、ゆっくり安定した動きで対象物をスキャンしてください。Scannerと対象物表面の距離は200~400mmを保つようにしてください。スキャン画面に表示される距離インジケーターを参考に、適切な距離を維持してください。
ご注意:スキャン中、点群はデータがスキャンされるにつれて赤から青に変化します。青は高品質であることを示しており、同じ箇所を異なる角度からスキャンすることで、品質が向上します。モデルのほとんどが青になったら、スキャンを完了するのが理想的です。
⑤ [ワンクリック編集]をクリックすると、モデルが自動で処理されます。より詳細なモデルが必要な場合は、融合やメッシュ化の設定、その他のツールを使用して手動で編集してください。点群を手動で融合する際は、システムが推奨する点間距離の使用をおすすめします。点間距離を小さくしすぎると、計算時間が大幅に長くなる可能性があります。詳しくは、モデル編集章をご参照ください。
⑥ 後処理の完了後、モデルを PLY、OBJ、STL などの形式でエクスポートすることができます。