¶ 1. 交差ライン/平行ライン
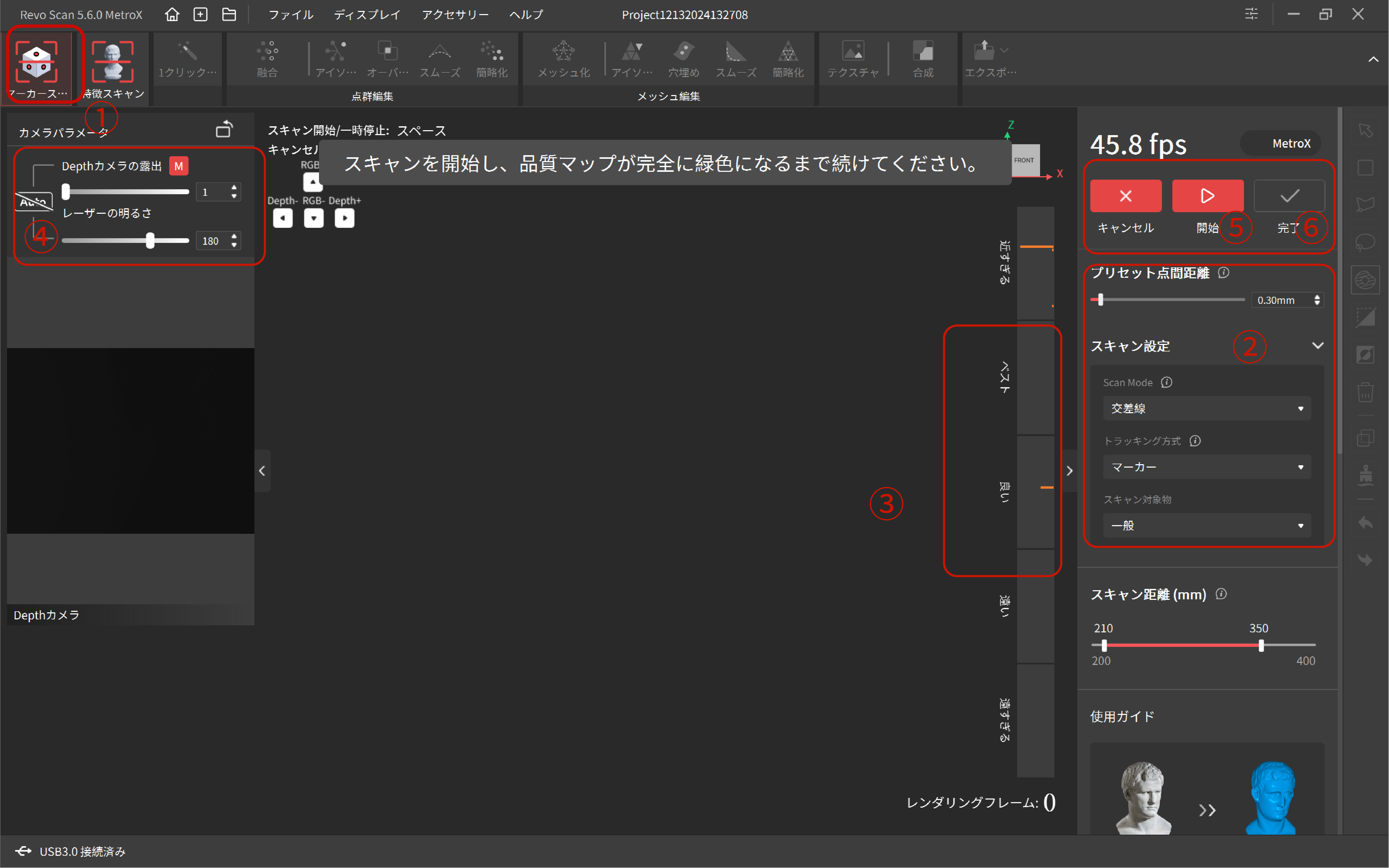
① 「新規プロジェクト」をクリックすると、プロジェクトインターフェースに進み、デフォルトで「マーカースキャン」画面が表示されます。
② スキャン設定で、「交差ライン」または「平行ライン」モードを選択し、プリセット点間距離を設定します。その後、必要に応じてトラッキングモードや対象物の種類を選択してください。
③ スキャナーを手に持ち、スキャン距離バーが「ベスト」または「良い」を示すまで、スキャナーと対象物との距離を調整してください。スキャン中に、1フレーム内で少なくとも5つのマーカーが検出されるようにしてください。
④  ボタンをクリックすると、Depthカメラの露出は「自動」に切り替わります。もう一度クリックして、露出をオフ
ボタンをクリックすると、Depthカメラの露出は「自動」に切り替わります。もう一度クリックして、露出をオフ にした後、スライダーをドラッグして、Depthカメラのプレビューウィンドウ内でオブジェクトに青と赤の部分ができるだけ少なくなるよう調整し、オブジェクト全体がグレーになるまで調整してください。
にした後、スライダーをドラッグして、Depthカメラのプレビューウィンドウ内でオブジェクトに青と赤の部分ができるだけ少なくなるよう調整し、オブジェクト全体がグレーになるまで調整してください。
⑤スキャナーの背面またはソフトウェアで  ボタンをクリックして、スキャンを開始します。適切な距離内でスキャナーを対象物の周りでゆっくり動かしてください。スキャン中にいつでも
ボタンをクリックして、スキャンを開始します。適切な距離内でスキャナーを対象物の周りでゆっくり動かしてください。スキャン中にいつでも ボタンをクリックしてモデルを一時停止し、確認することができます。モデルが不完全な場合は、 ボタンをクリックしてスキャンを再開してください。
ボタンをクリックしてモデルを一時停止し、確認することができます。モデルが不完全な場合は、 ボタンをクリックしてスキャンを再開してください。
⑥ モデルが完成したら、 ボタンをクリックしてスキャンを終了してください。
ボタンをクリックしてスキャンを終了してください。
¶ 2.フルフィールド
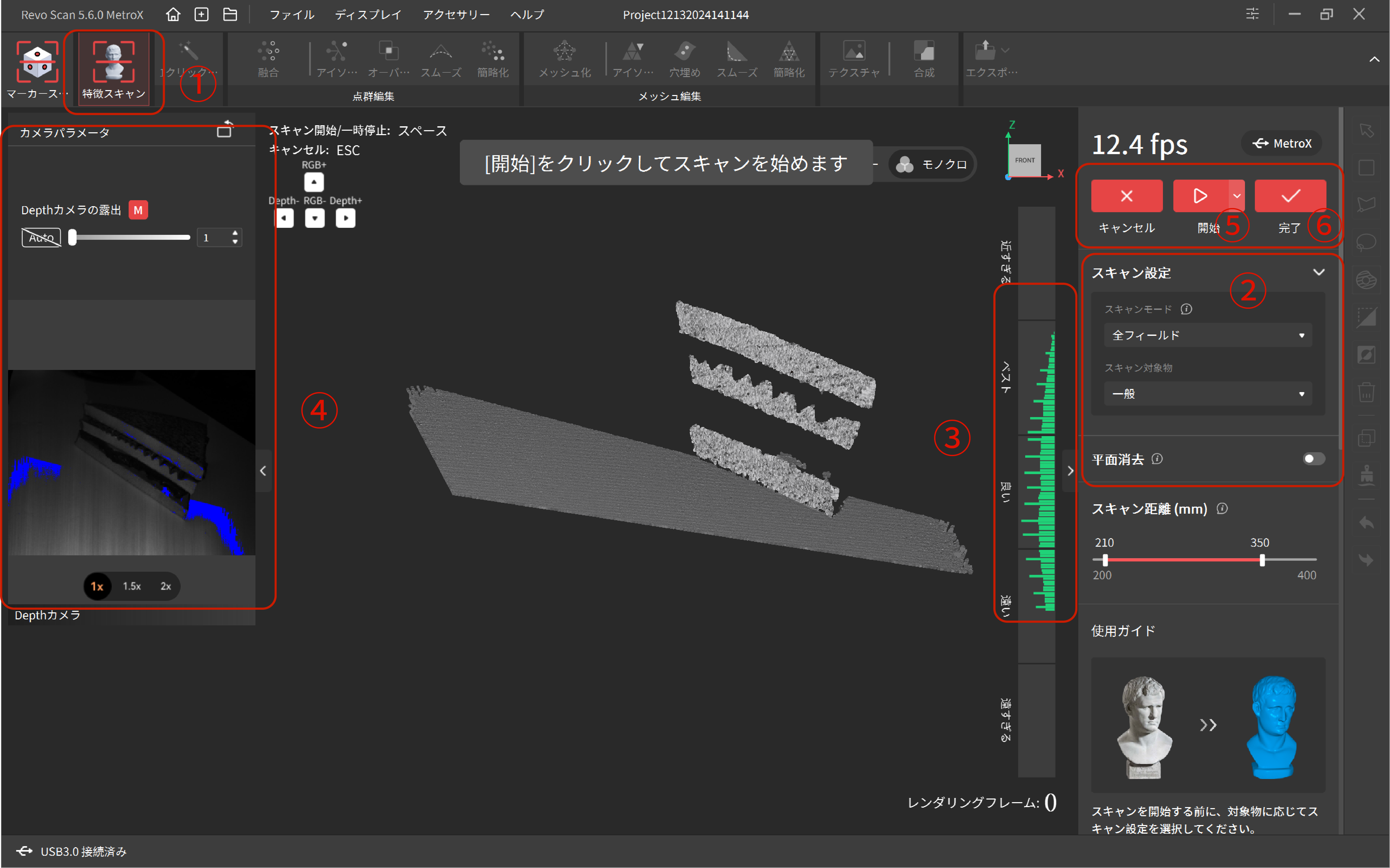
①「新規プロジェクト」をクリックして、プロジェクトインターフェースに進みます。必要に応じて「マーカースキャン」または「特徴スキャン」を選択してください。
② スキャン設定で、「フルフィールド」モードを選択し、次に、トラッキングモードと対象物の種類を選択してください。
③ スキャナーを手に持ち、スキャン距離バーが「ベスト」または「良い」を示すまで、スキャナーと対象物との距離を調整してください。
④ボタンをクリックすると、Depthカメラの露出は「自動」に切り替わります。もう一度クリックして、露出をオフにした後、スライダーをドラッグして、Depthカメラのプレビューウィンドウ内でオブジェクトに青と赤の部分ができるだけ少なくなるよう調整し、オブジェクト全体がグレーになるまで調整します。
⑤スキャナーの背面またはソフトウェアで  ボタンをクリックして、スキャンを開始します。適切な距離内でスキャナーを対象物の周りでゆっくり動かしてください。スキャン中にいつでも ボタンをクリックしてモデルを一時停止し、確認することができます。モデルが不完全な場合は、 ボタンをクリックしてスキャンを再開してください。
ボタンをクリックして、スキャンを開始します。適切な距離内でスキャナーを対象物の周りでゆっくり動かしてください。スキャン中にいつでも ボタンをクリックしてモデルを一時停止し、確認することができます。モデルが不完全な場合は、 ボタンをクリックしてスキャンを再開してください。
⑥ モデルが完成したら、 ボタンをクリックしてスキャンを終了してください。
¶ 3. 自動ターンテーブル
① 「新規プロジェクト」をクリックして、プロジェクトインターフェースに進みます。必要に応じて「 マーカースキャン 」または「特徴スキャン」を選択してください。
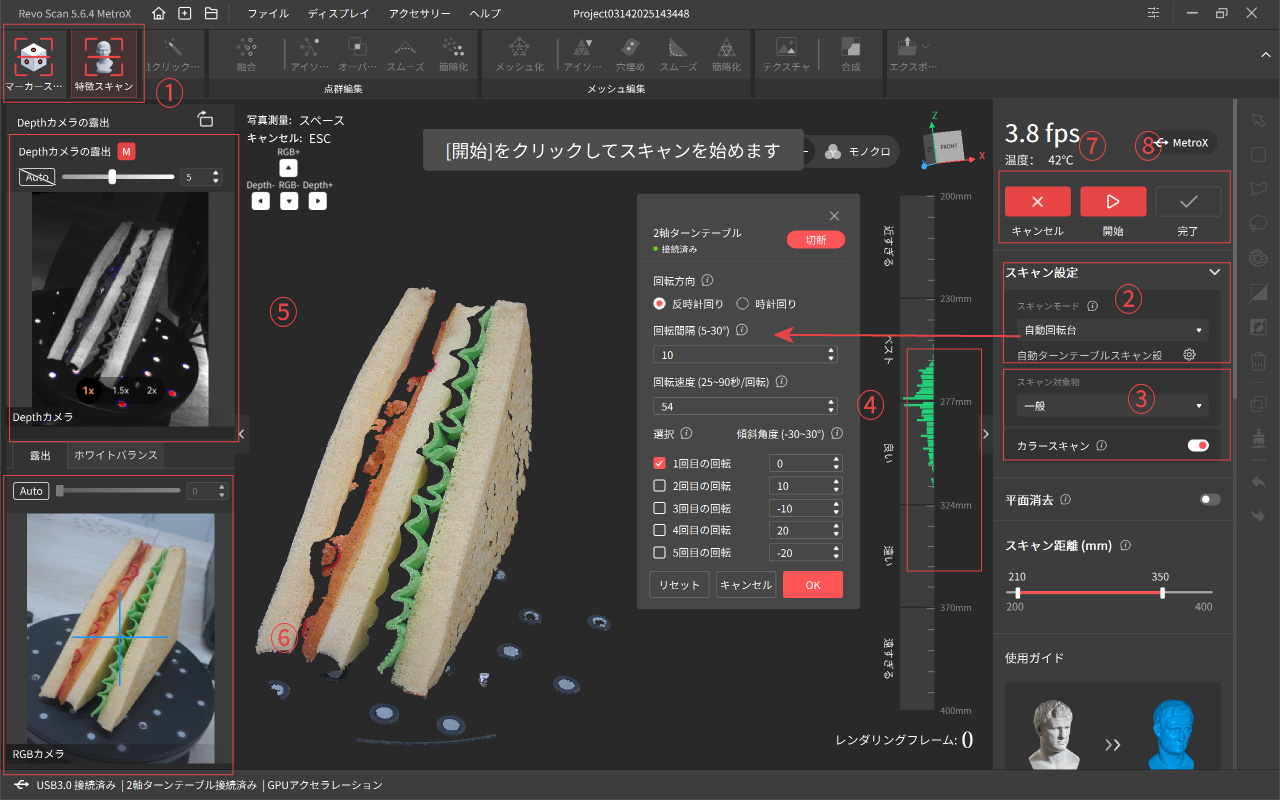
② スキャン設定で、「 自動ターンテーブル 」モードを選択し、「 設定 」ボタンをクリックしてターンテーブルを接続し、回転方向、間隔、総回転数を設定してください。初心者の方ははデフォルト設定を使用することをおすすめします。
③ 必要に応じて対象物の種類を選択してください。必要に応じて、カラースキャンを切り替え、スキャン中に対象物が均等に照明されていることを確認してください。
④ スキャン距離バーが「ベスト」または「良い」を示すまで、スキャナーと対象物との距離を調整してください。
⑤ ボタンをクリックすると、Depthカメラの露出は「自動」に切り替わります。もう一度クリックして、露出をオフにした後、スライダーをドラッグして、Depthカメラのプレビューウィンドウ内でオブジェクトに青と赤の部分ができるだけ少なくなるよう調整し、オブジェクト全体がグレーになるまで調整します。
⑥ カラースキャンを行う際は、RGBカメラの露出も調整する必要があります。 ボタンをクリックして露出を自動設定するか、オート露出をオフにして、スライダーをドラッグしてRGBプレビューウィンドウ内で対象物の色が鮮明でシャープに見えるように調整してください。
⑦ ボタンをクリックすると、ソフトウェアがターンテーブルを制御し、設定に従ってシングルショットモードで自動的にスキャンを完了します。モデルが不完全な場合は、 ボタンをクリックしてスキャン経路をリセットした後、スキャンを再開してください。
⑧ モデルが完成したら、 ボタンをクリックしてスキャンを終了してください。