¶ 1. 跟踪扫描
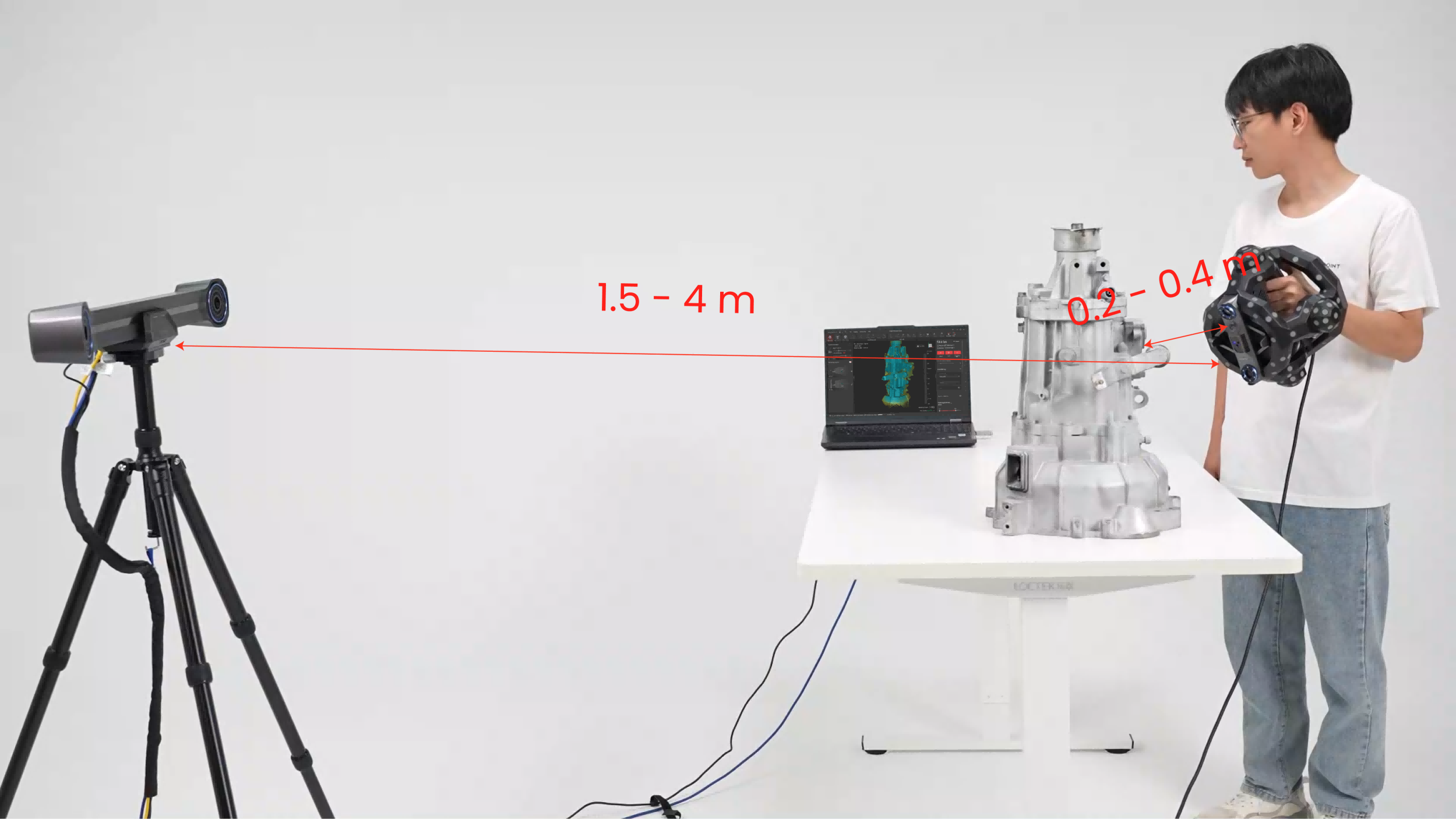
Tracker 实时追踪 Scanner 的位置和角度,无需粘贴标记点即可进行扫描。扫描时 Tracker 和物体必须保持静止,适合中小型物体的快速扫描。
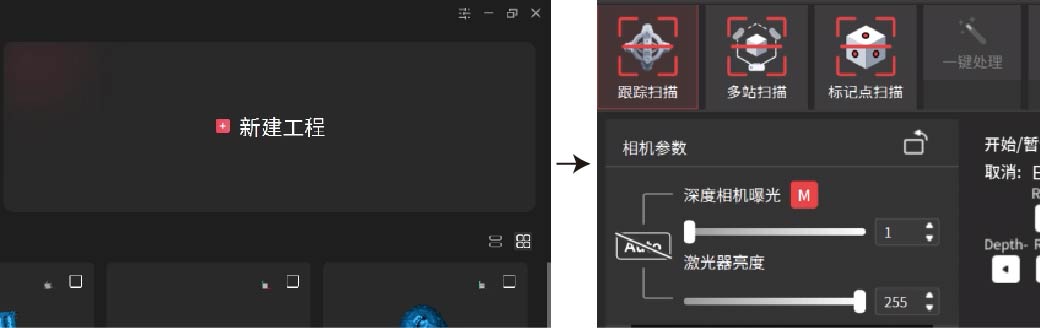
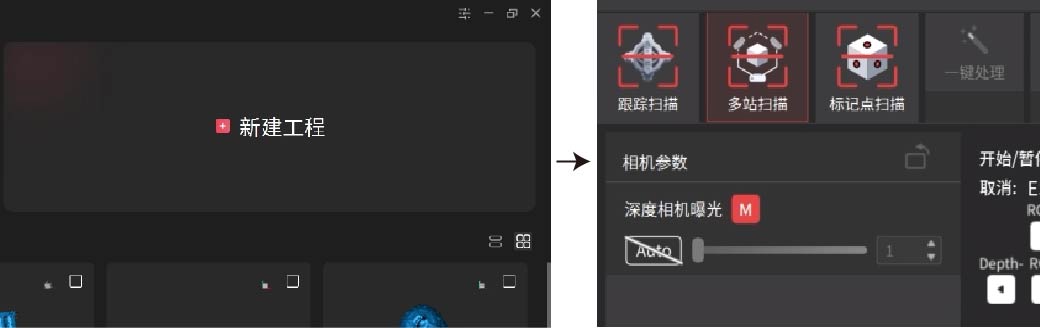
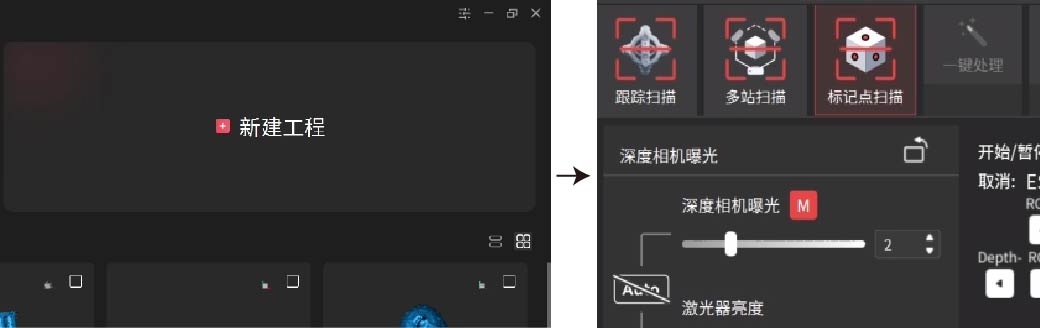
扫描仪连接成功后,点击软件首页“新建工程”进入工程页,选择“跟踪扫描”。
按照以下步骤开启跟踪扫描:
※ 请以 Revo Track 实际软件画面为准。
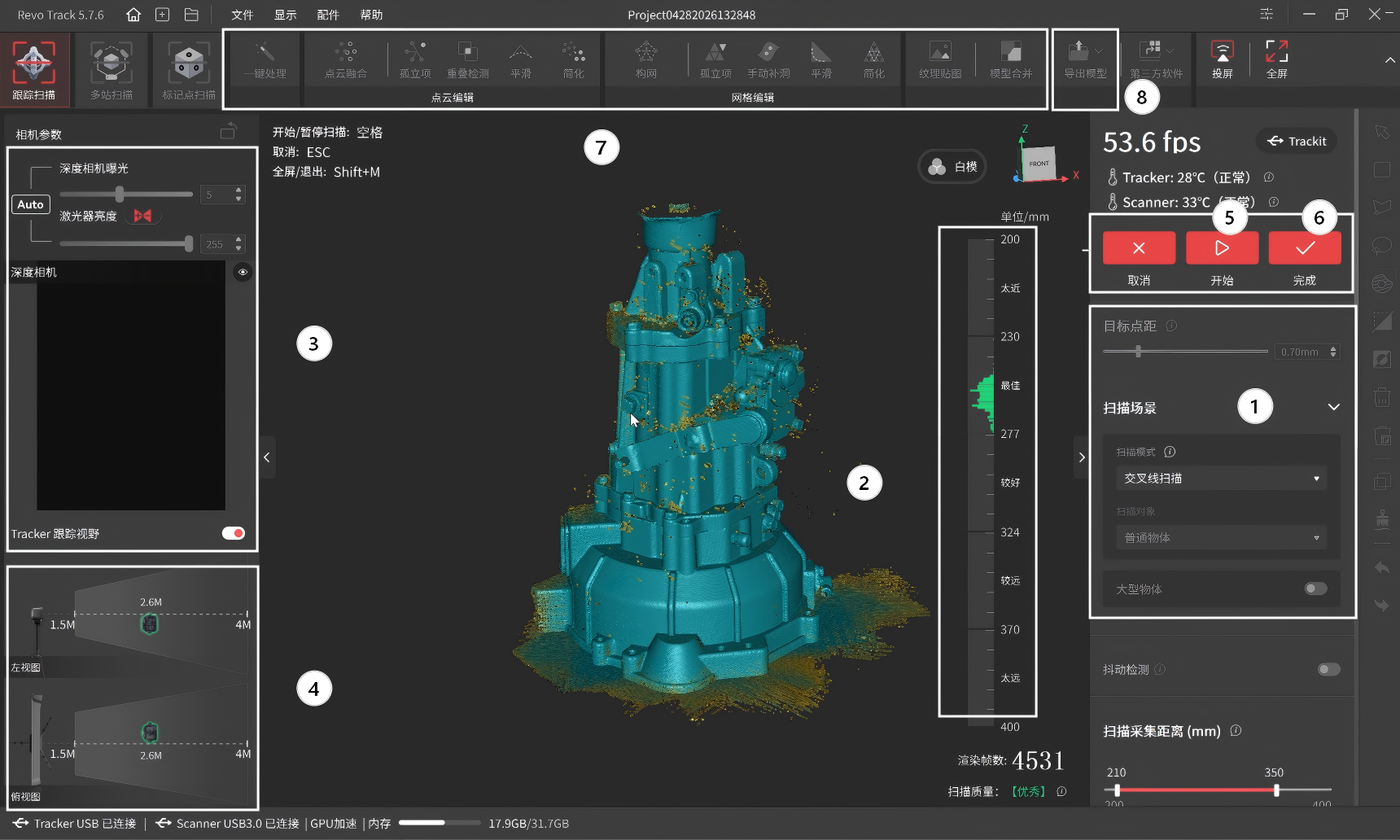
① 在扫描设置中,选择扫描模式,扫描对象并按需调整目标点距。
② 调节扫描仪与物体的间距,直至右侧距离直方图内的绿色光条指示“最佳”或“较好”。
③ 点击 Auto 按钮,开启深度相机自动曝光,或再次点击关闭自动曝光,拖动滑动条手动调节,确保深度相机预览窗口中的激光线清晰可见。
注:如需查看隐藏的深度相机预览窗口,可手动点击右上角  按钮重新展开。
按钮重新展开。
④ 调整 Scanner 与 Tracker 之间的距离,确保 Scanner 在 Tracker 的跟踪视野范围内。
⑤ 点击  按钮开始扫描。 扫描过程中,请将 Scanner 对准待扫描物体。调整 Scanner 与物体的间距,以界面距离直方图的指示为准。持稳 Scanner 在同一区域停留数秒,待模型表面完全呈蓝色状态后再匀速缓慢移动至下一区域。点击
按钮开始扫描。 扫描过程中,请将 Scanner 对准待扫描物体。调整 Scanner 与物体的间距,以界面距离直方图的指示为准。持稳 Scanner 在同一区域停留数秒,待模型表面完全呈蓝色状态后再匀速缓慢移动至下一区域。点击  按钮暂停检查模型扫描效果。若模型仍有缺失,可点击 按钮继续扫描。
按钮暂停检查模型扫描效果。若模型仍有缺失,可点击 按钮继续扫描。
⑥ 待模型扫描完整后,点击  按钮结束扫描。
按钮结束扫描。
⑦ 点击 “一键处理” 自动完成模型处理,若需更精细的模型,也可依次手动完成点云融合、构网及其他可选操作。点云融合时,建议使用系统推荐点距。设置的点距太小将导致计算时间过长。如需了解更多详细内容,请点击 模型编辑。
⑧ 模型处理完成后可根据需求导出PLY, OBJ, STL等格式的模型。
¶ 2. 多站扫描
适合大物体(如汽车、工业部件)扫描。需将大物体划分为多个扫描区域,通过每次移动Tracker至下一区域拼接点云数据。确保Tracker移动过程中始终看到至少5个标记点。
扫描仪连接成功后,点击软件首页“新建工程”进入工程页,选择“多站扫描”。按照以下步骤开启跟踪扫描:
1) 规划起始区域
选择一个扫描起始区域,在物体表面以20cm的相隔距离放置至少5个锚标记块或标记点。将 Tracker 对准起始区域,并调整距离和高度,确保它的视野范围内能捕捉到这些标记点。

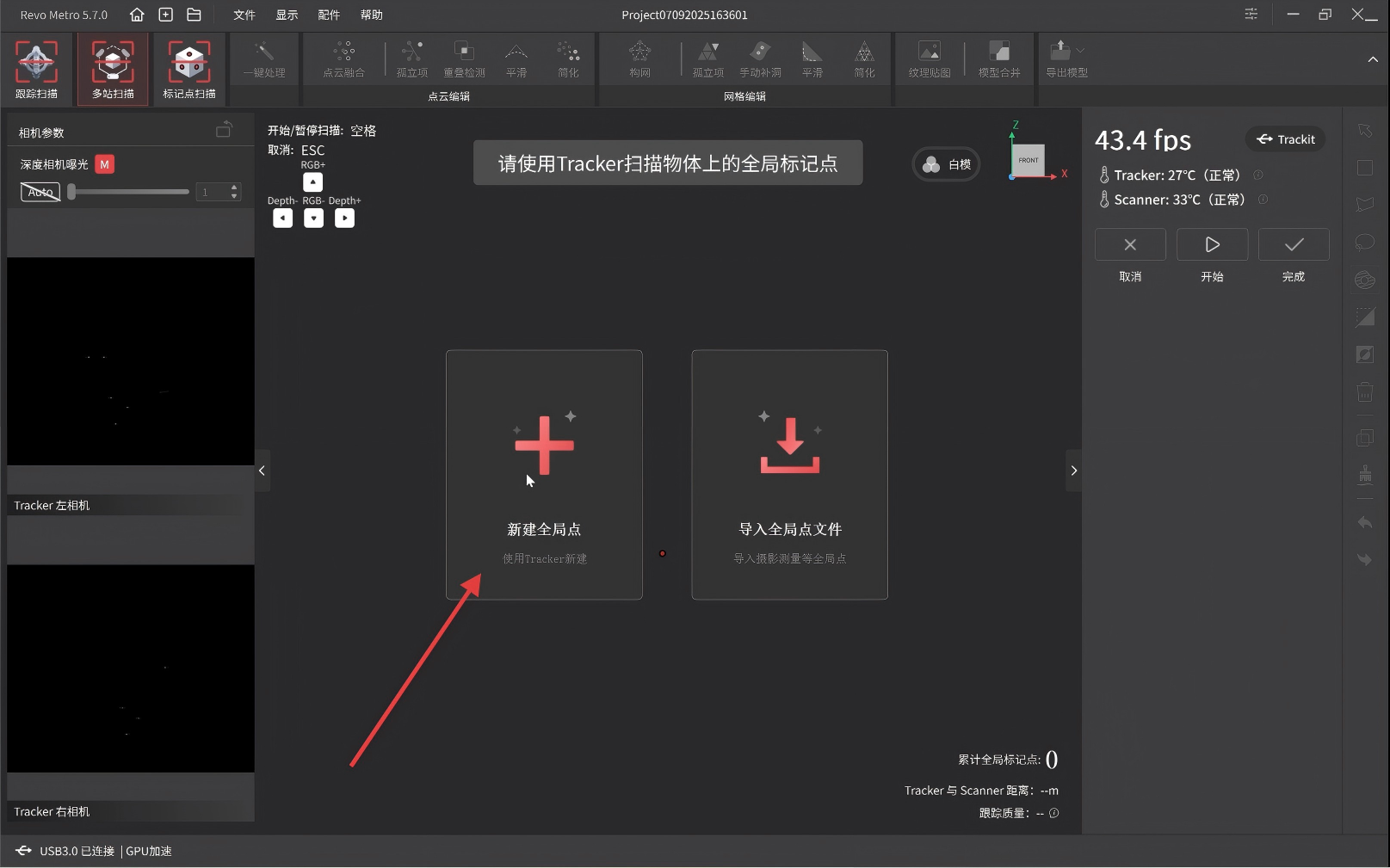
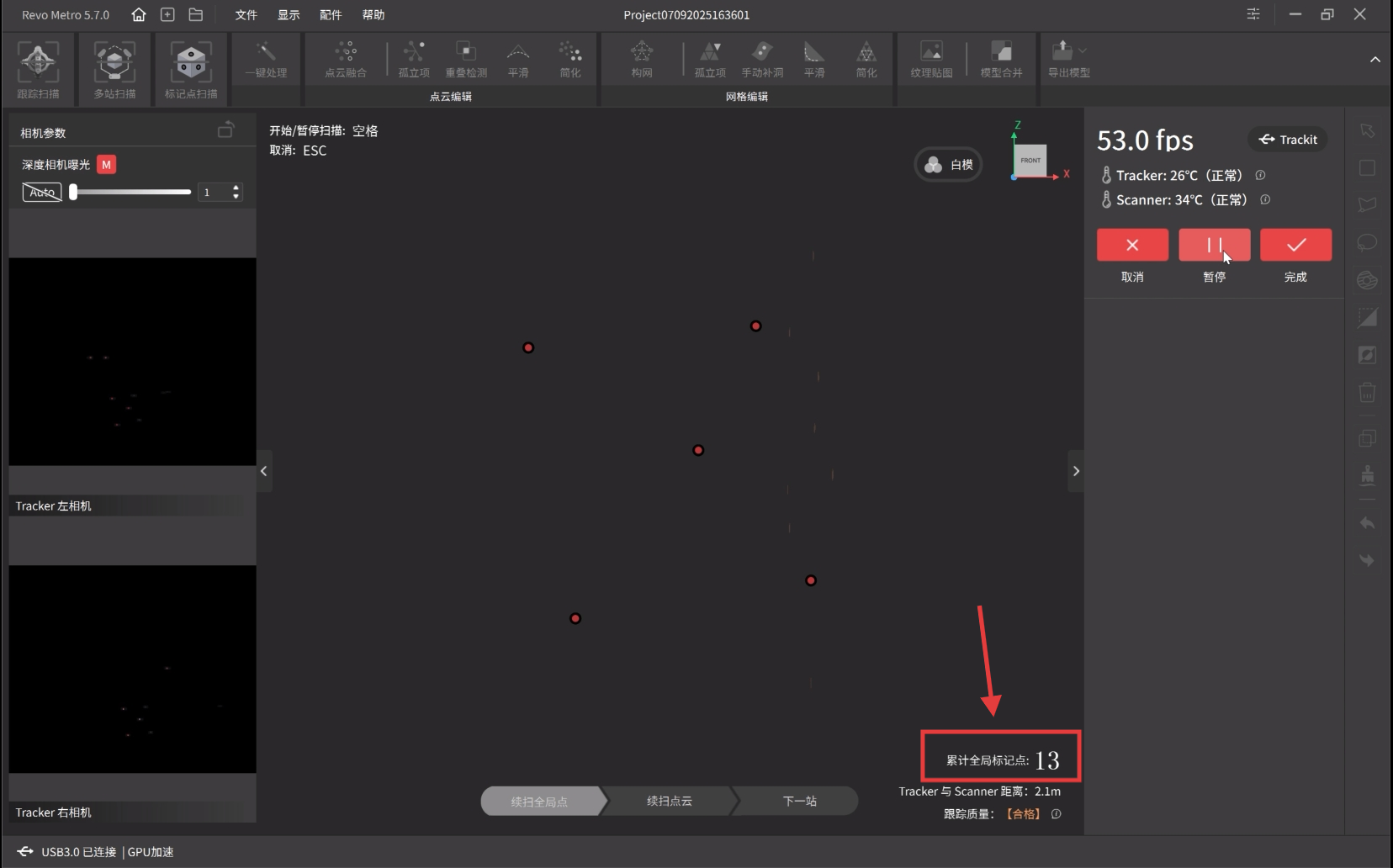
2) 扫描起始区域的全局标记点
扫描全局标记点时,移开 Scanner 以确保 Tracker 只捕获被扫物体上的标记点。

点击“新建全局点”捕捉标记点。
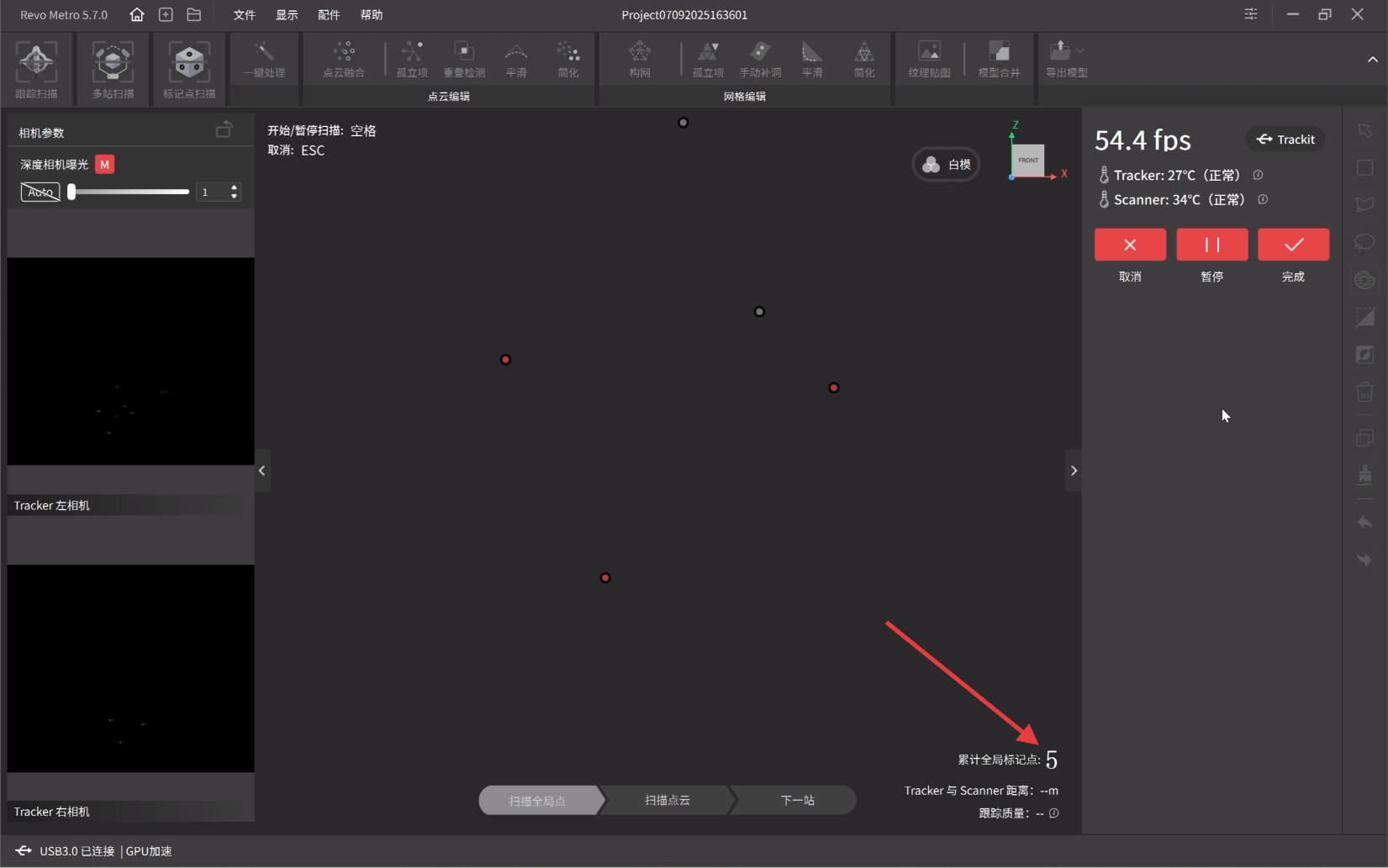
点击“开始”按钮,Tracker将采集全局标记点。扫描过程中,右下角将实时显示已采集的全局标记点数量。
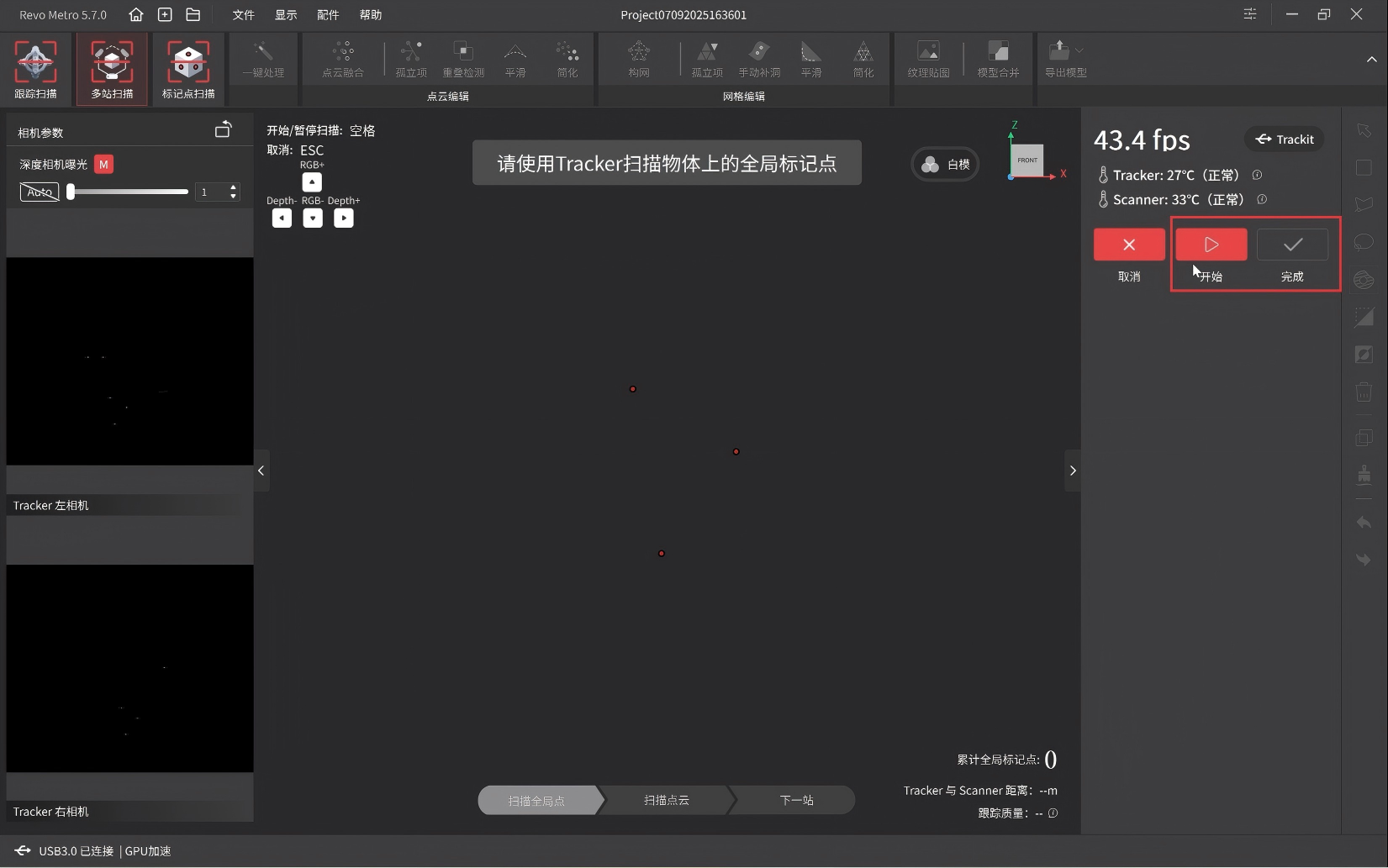
当界面显示已识别至少 5 个标记点时,点击“完成”按钮结束操作。
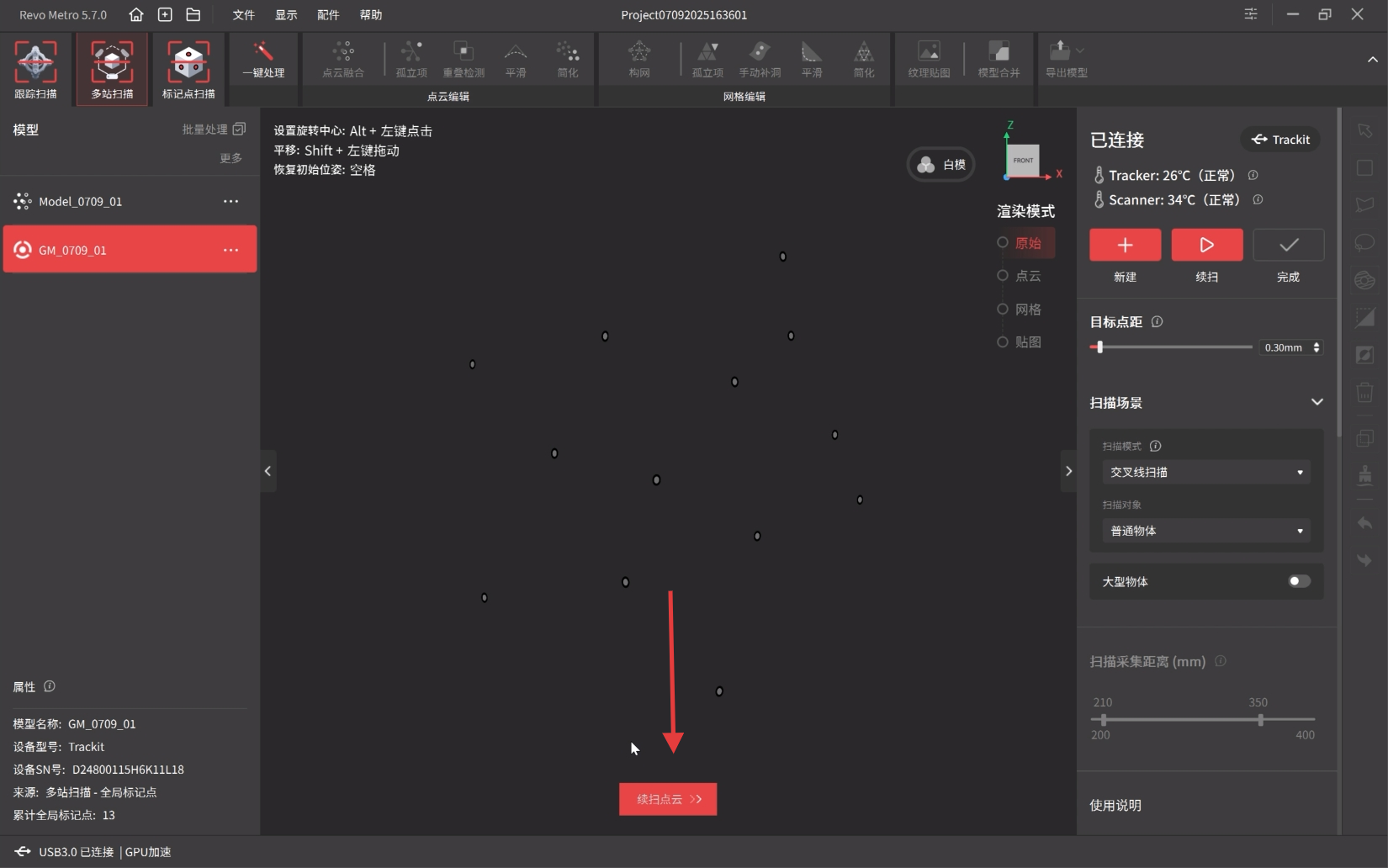
3) 扫描起始区域的点云
点击点云扫描按钮。
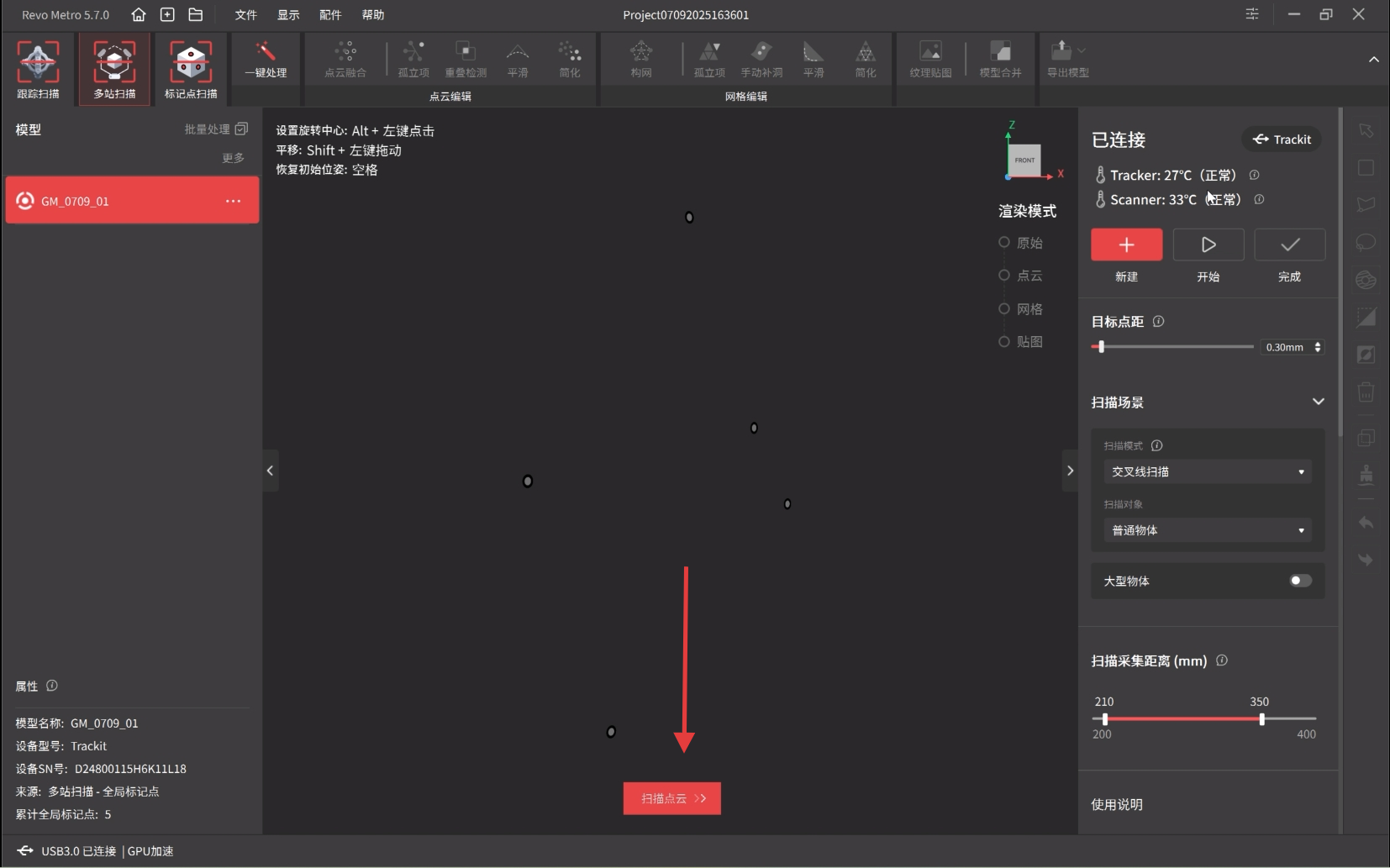
在“扫描设置”中选择扫描模式、扫描对象,并根据需要设置扫描目标点距。然后点击“开始”按钮捕捉点云。
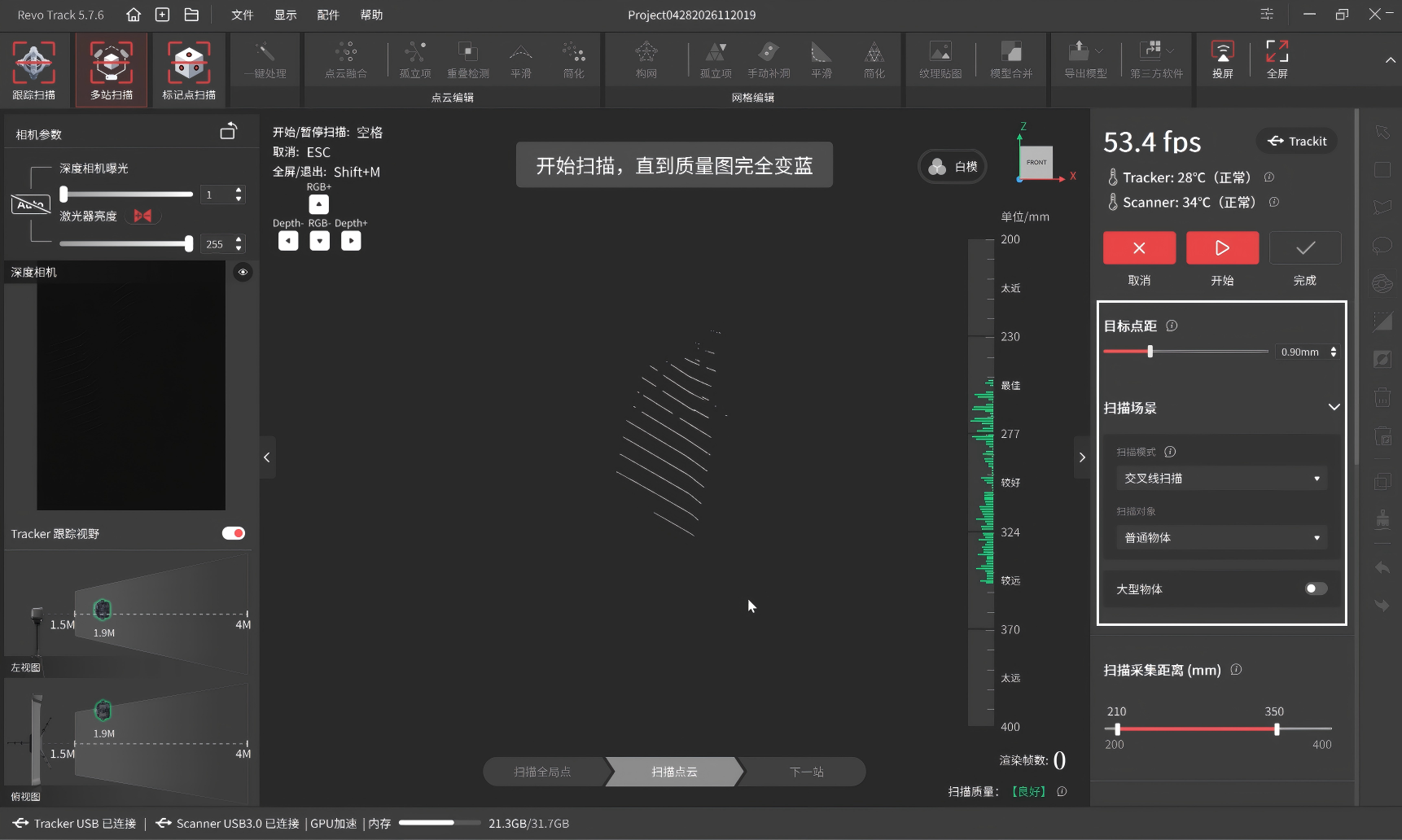
手持 Scanner 缓慢平稳地移动,捕捉起始区域的点云数据。扫描时,请确保 Tracker 始终能看到至少五个已捕捉的标记点。
扫描时,请勿遮挡 Tracker 的视野或物体上的标记点并确保 Tracker 能同时看到扫描仪和物体上的标记点。

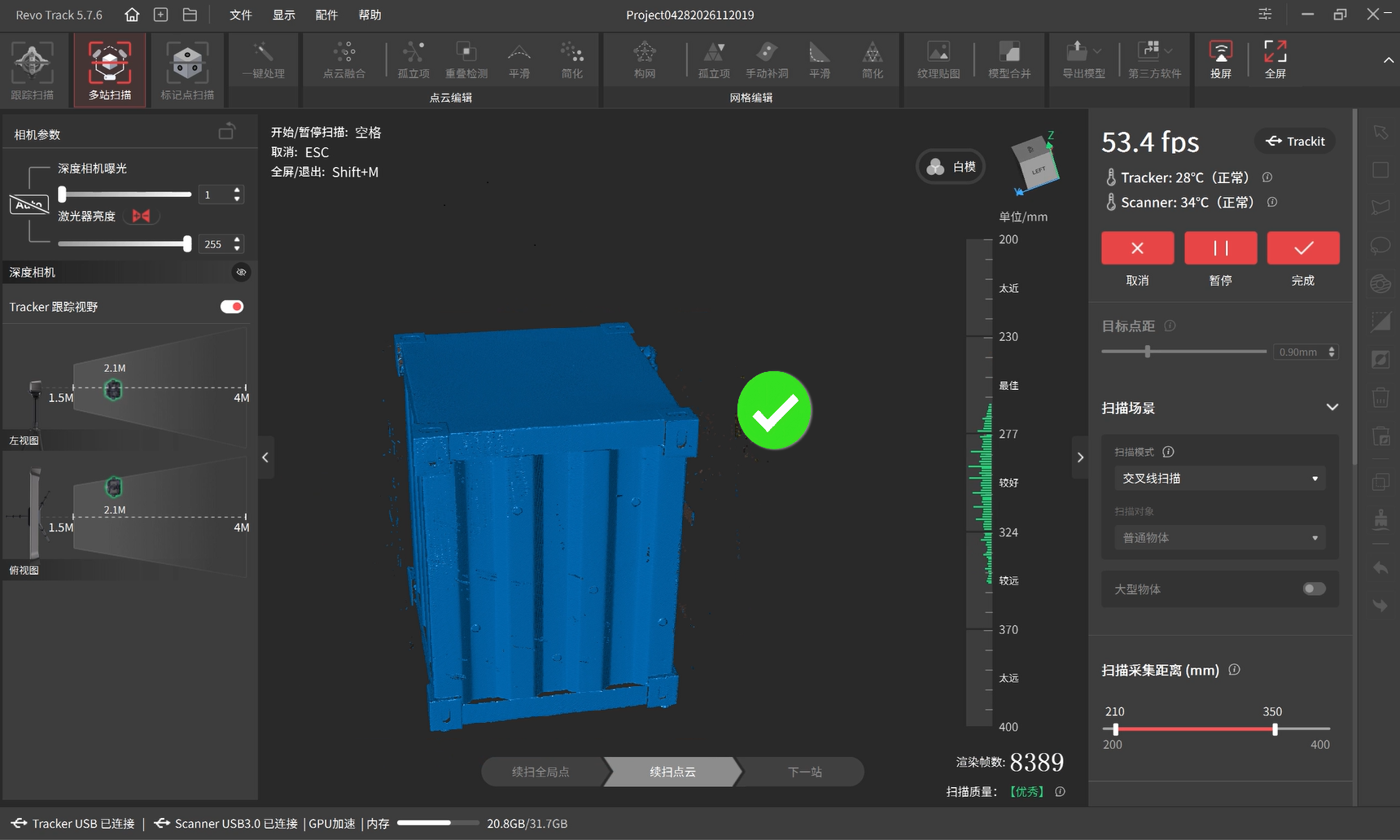
扫描过程中,软件界面的模型颜色会逐渐由黄色向蓝色过渡。完全呈蓝色状态时质量较高,所以在扫描结束前请尽量确保模型完全变蓝。
4) 布置下一扫描区域
在物体表面用至少5个锚标记块或标记点布置下一个扫描区域。
注:由于 Tracker 仍需使用起始区域已布置的点进行辅助拼接,所以在这个过程中请勿移除起始区域的锚标记块或标记点。

5) 将 Tracker 挪动到下一个区域
单击“下一站”进入下一站扫描界面。
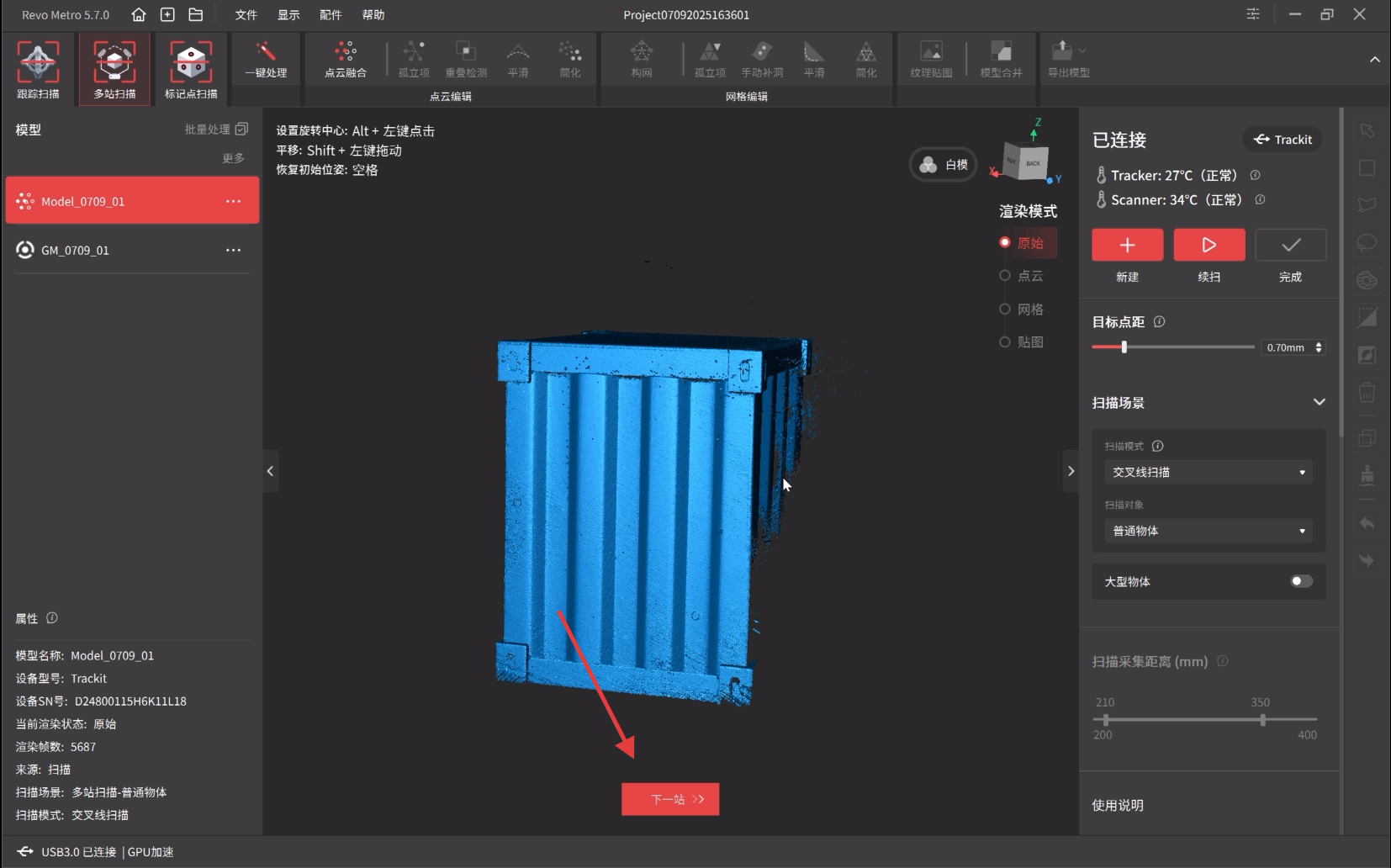
将 Tracker 从起始区域缓慢、平稳地移动到下一区域(或将物体从起始区域移动到下一个区域)。移动过程中,请确保单帧画幅里至少有 5 个标记点能够被 Tracker 识别到。
参考右下角显示的全局标记点总数。当显示的数量与两个区域中的标记点总数一致时,点击“完成”按钮。
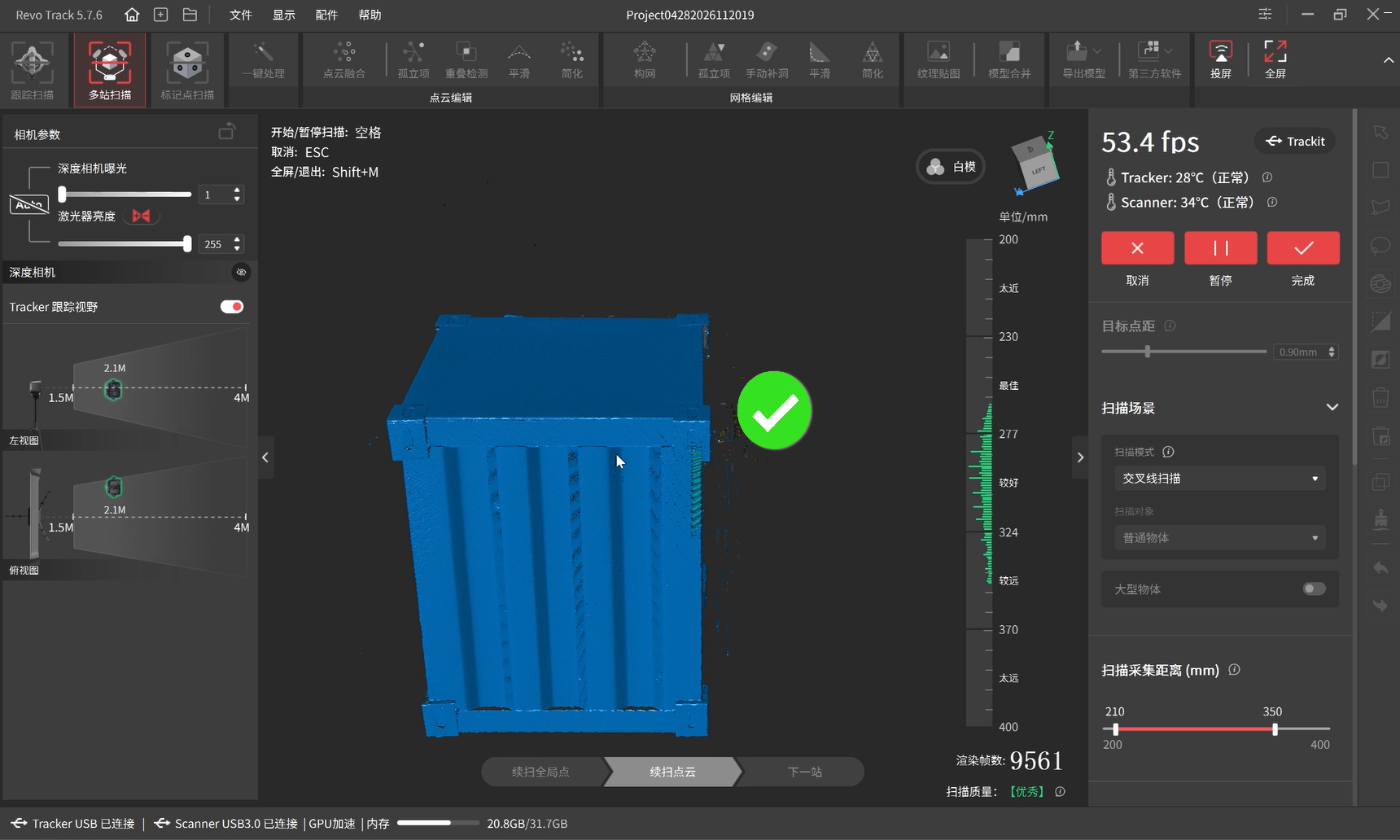
6) 扫描下一区域点云
点击“继续点云扫描按钮”,捕捉下一区域的点云数据。
接下来,手持扫描仪缓慢且平稳地移动,开始捕捉下一区域的点云数据。
扫描过程中请不要遮挡到 Tracker 的视野或物体上的标记点,确保 Tracker 始终能同时识别 Scanner 和标记点。

待模型表面完全变蓝后,点击“完成”按钮。
7) 扫描剩余区域
如果扫描尚未完成,请重复步骤 5 和 6,继续扫描物体的剩余部分,直到物体整个表面都被扫描完整。
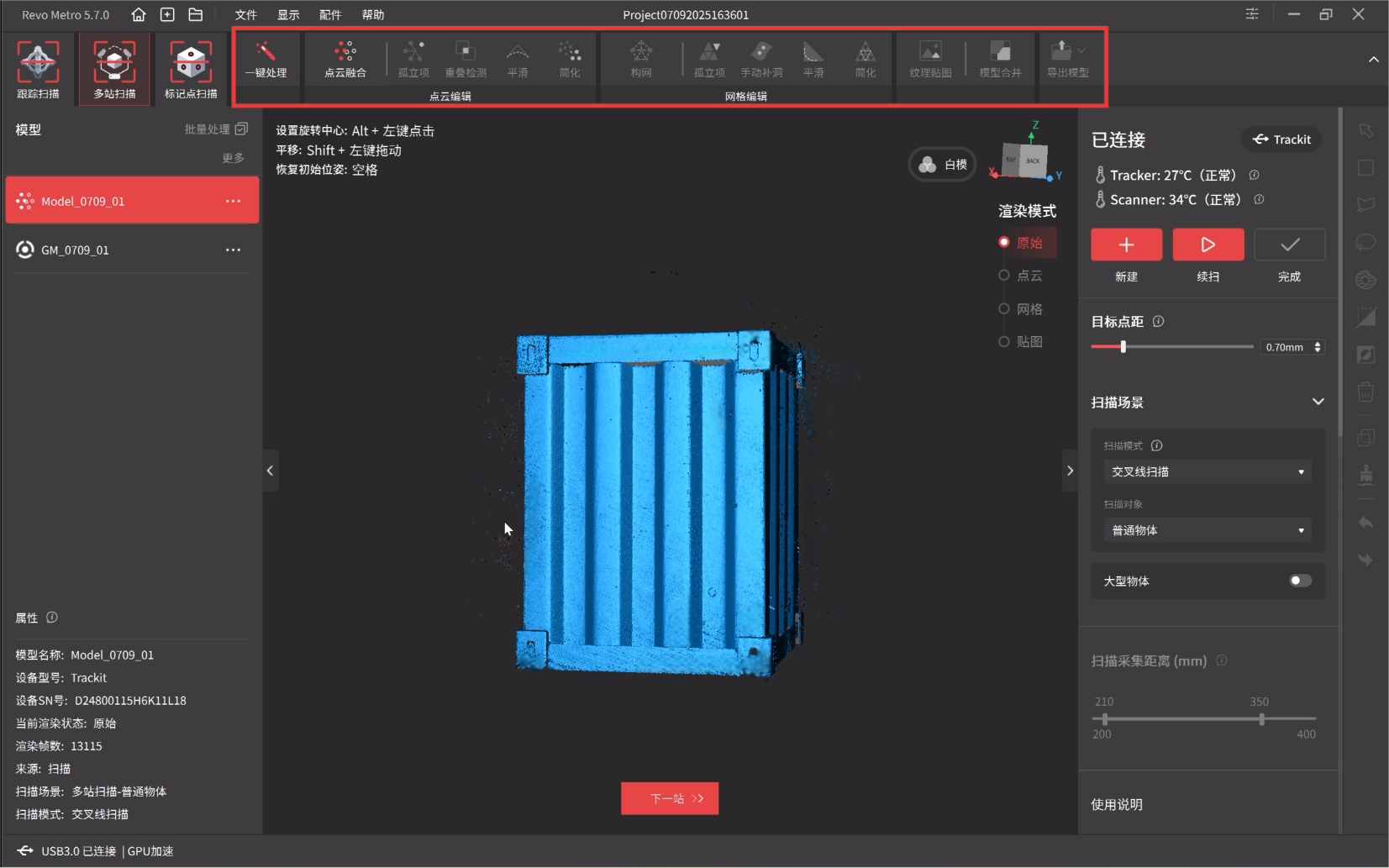
8) 处理模型
点击 “一键处理” 自动完成模型处理,若需更精细的模型,也可依次手动完成点云融合、构网及其他可选操作。点云融合时,建议使用系统推荐点距。设置过小的点距将导致计算时间过长。如需了解更多详细内容,请点击 模型编辑。
9) 导出模型
模型处理完成后可根据需求导出PLY, OBJ, STL等格式的模型。
¶ 3. 标记点扫描
Scanner 可作为独立的设备进行扫描,但需在物体表面粘贴标记点帮助 Scanner 识别。适合中小型物体扫描。
扫描前,请先在物体表面粘贴标记点或在其周围放置标记块,创建标记点环境。

扫描仪连接成功后,点击软件首页“新建工程”进入工程页,选择“标记点扫描”。
按照以下流程开始扫描:

① 在“扫描设置”中选择扫描模式,扫描对象并根据需要设置扫描目标点距。
② 调节扫描仪与物体的间距,直至右侧距离直方图内的绿色光条指示“最佳”或“较好”。
③ 点击 Auto 按钮,开启深度相机自动曝光,或再次点击关闭自动曝光,拖动滑动条手动调节,确保深度相机预览窗口中的激光线清晰可见。
注:如需查看隐藏的深度相机预览窗口,可手动点击右上角 按钮重新展开。
④ 点击 按钮开始扫描。 扫描过程中,请将扫描仪对准待扫描物体,缓慢平稳的围绕物体移动。并尽量使扫描仪与物体的间距保持在200 - 400 mm。可通过 Revo Track 软件界面上的距离指示条,实时确认是否处于最佳扫描范围。点击 按钮,在扫描过程中随时暂停并检查模型扫描效果。如果模型仍有缺失,点击 按钮继续扫描。 待模型扫描完整后,点击 按钮,结束扫描。
注: 扫描过程中,软件界面的模型颜色会逐渐由黄色向蓝色过渡。完全呈蓝色状态时扫描质量较高,所以在扫描结束前请尽量确保模型完全变蓝。
⑤ 点击 “一键处理” 自动完成模型处理,若需更精细的模型,也可依次手动完成点云融合、构网及其他可选操作。点云融合时,建议使用系统推荐点距。设置的点距太小将导致计算时间过长。如需了解更多详细内容,请点击 模型编辑。
⑥ 模型处理完成后可根据需求导出PLY, OBJ, STL等格式的模型。