¶ Revo Scan 5 へようこそ
Revo Scan 5 は、Revopoint 3D スキャナーに不可欠なスキャン編集ツールです。Revo Scan 5 により、3D スキャンした点群データを作成し、そのデータを 3D モデルや処理済み点群データに編集して、エクスポートし、3D モデリング、3D プリント等、様々な用途に適用できます。
本マニュアルでは、Revo Scan 5 の機能を詳しく説明し、スキャンの完全なステップバイステップガイドを提供します。初心者の方は、Revo Scan 5 を使用する前にこのマニュアルをお読みください。
製品マニュアルの電子版が必要な場合は、マニュアルの左側の章ナビゲーションバーの下部にある[印刷形式]ボタンをクリックし、プリンターを[PDFとして保存]に選択して保存すると、マニュアルのPDFファアイルをダウンロードできます。
 |
 |
¶ ご使用前の注意事項
• 本マニュアルでは、Revo Scan 5( PC )の Windows、macOS デバイスでの操作について説明しています。Revo Scan 5( スマホ )については、iOS または Android の Revo Scan 5 でマニュアルをご確認ください。
• 初心者の方は、このガイドを最大限に活用するために、まず専門用語を参照し、用語に慣れることをお勧めします。
• 最良のスキャン体験のために、ソフトウェアは継続的に更新されます。
• ソフトウェアの更新により Revo Scan 5 のユーザーインターフェイスが変更される可能性があります。実際のレイアウトは Revo Scan 5 でご確認ください。このマニュアルを最新の状態に保つよう最大限努力しますが、見落としがある可能性があります。マニュアルに記載されていないことについては、ぜひフォーラムでお問い合わせください。
¶ 1.Revo Scan 5のインストール
¶ 1.1 推奨システム要件
Revopoint 3D スキャナー使用するには、推奨要件を満たすパソコンが必要です。
| システム | 最低要件 | 推奨要件 |
 |
Windows: Win10/11 ( 64 ビット ) RAM: ≥ 16GB CPU: Intel i7 12th gen またはそれ以上 |
Windows: Win 10/11 ( 64-ビット ) RAM: ≥ 32GB CPU: Intel i9 11th gen またはそれ以上 |
 |
Mac: macOS 11.0 以降のモデル RAM: ≥ 8GB CPU: M1 Pro またはそれ以上 |
Mac: macOS 11.0 以降のモデル RAM: ≥ 8GB CPU: M3 またはそれ以上 |
¶ 1.2 インストール手順
Window と macOSの場合、まずはRevopoint公式サイトのサポート-ダウンロード から最新版の Revo Scan 5 をダウンロードしてください。
¶ 1.2.1 Windows
ダウンロードしたファイルをダブルクリックし、インストールウィザードに従って Revo Scan 5 をインストールします。Revo Scan 5 のアイコンをダブルクリックして起動します。
¶ 1.2.2 macOS
Mac の Finder で、Revo Scan 5 のダウンロードを探し、右クリックし、「Open With」( オープン ウィズ )から「Installer」( インストーラー )をクリックし、インストールウィザードに従ってください。完了したら、Revo Scan 5 のアイコンをダブルクリックして開きます。
ご注意: Mac では、App Store の外のソフトウェアをインストールするために、設定を有効にする必要がある可能性があります。
アップルメニュー>システム設定へ、サイドバーのプライバシーとセキュリティをクリックし、右側のセキュリティを選び(スクロールダウンする必要があるかもしれません)、そしてセキュリティ設定を「アプリストアおよび特定された開発者」に変更します。
¶ 2. インターフェイス概要
¶ 2.1 ホームページ

¶ 2.2 プロジェクトインターフェース

¶ 3. 設定
¶ 3.1 スキャナー設定
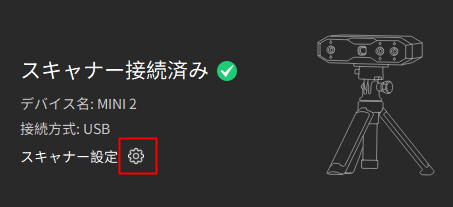 |
スキャナーが接続されている場合は、ホームページスキャナーの設定アイコンをクリックして、スキャナーを設定します。 |
¶ 3.1.1 基本情報
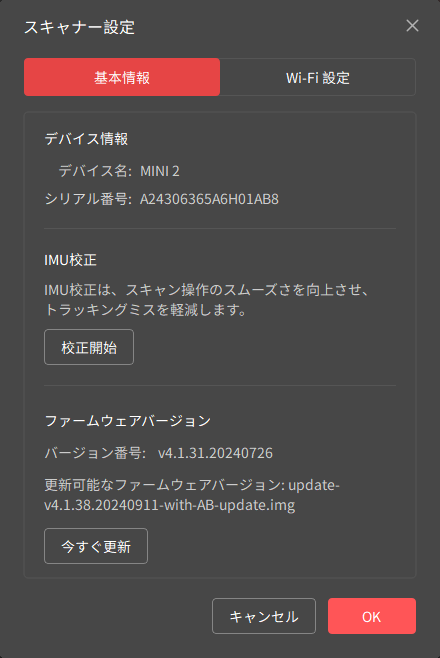 |
スキャナー情報 デバイス情報、シリアル番号。 ご注意:新しいファームウェアバージョンが利用可能な場合、「今すぐ更新」ボタンが表示されます。 IMU 校正 IMU センサーはスキャナーの加速度、回転、向きを測定します。IMU を校正することで、スキャナーのモーションデータを正確に追跡し、フレームのステッチとスキャンの精度を向上させます。「校正開始」ボタンをクリックし、画面の指示に従ってキャリブレーションをしてください。IMU 校正は、Revo Scan 5 のプロンプトが表示された場合のみ行う必要があります。 ご注意:このオプションは、接続されたスキャナーに IMU がある場合にのみ表示されます。 ファームウェアバージョン 新しいファームウェアバージョンが利用可能な場合、「今すぐ更新」ボタンが表示されます。ボタンをクリックし、指示に従ってアップデートしてください。 |
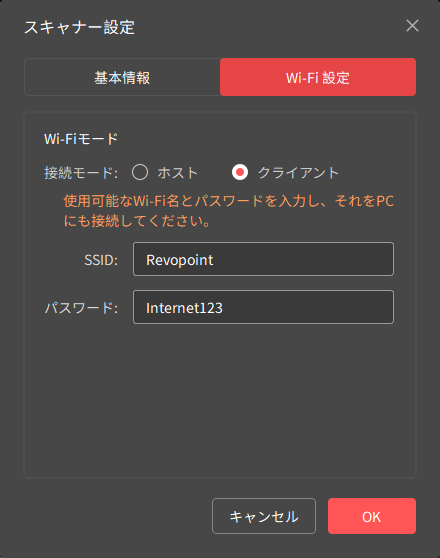
¶ 3.1.2 Wi-Fi 設定
 |
 |
|
| ホスト | クライアント | |
| 相違点 | スキャナー本体の Wi-Fi 経由で PC とスキャナーを接続し、PC はネットワークに接続できません。 | スキャナーと PC を同じ Wi-Fi 経由で接続。PC は同時にインターネットにアクセスできます。 |
| 接続方法 |
1.PCで、「スキャナー名-REVO X」の Wi-Fi を見つけ、接続します。 2.Revo Scan 5 を起動し、しばらくするとスキャナーが接続されます。 |
1.Wi-Fi 名( SSID )とパスワードを入力し、確認してください。 2.PCが同じネットワークに接続ことを確認し、Revo Scan 5 を開くと、しばらくしてスキャナーが接続されます。 |
| 注 |
1.スキャナーが Wi-Fi 接続に失敗する場合は、地域がお住まいの国と一致しているか確認してください。 2.パスワードを有効にした場合は、必ずそれを記憶してください。パスワードを忘れると Wi-Fi 接続ができなくなります。 |
このモードはネットワーク要件が高い( 5GHz )。最良のパフォーマンスを得るには、スキャナー、PC、Wi-Fi ルーターがすべて近くにあることを確認してください。 |
¶ 3.2 Revo Scan 5 設定
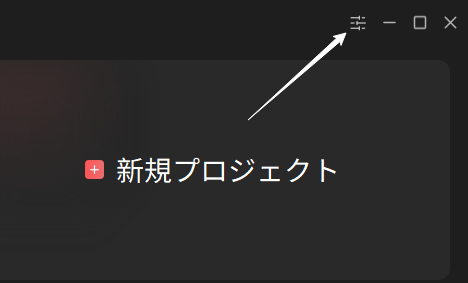 |
ホームページの右上にある設定アイコンをクリックして、Revo Scan 5 を設定します。 |
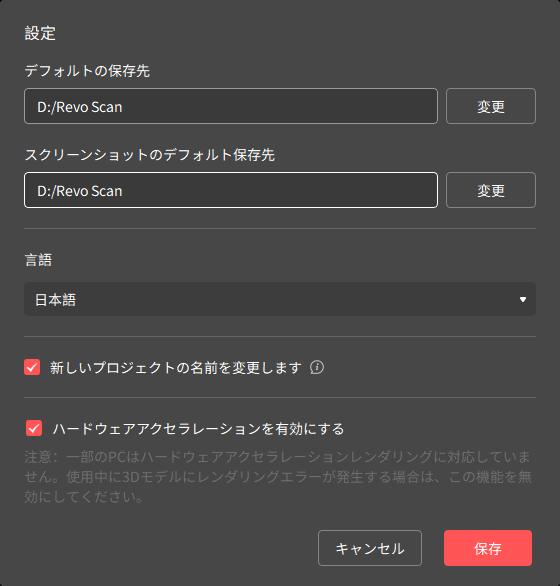 |
デフォルトの保存先:プロジェクトやモデルを保存するデフォルトのファイルの場所を選択します。 スクリーンショットのデフォルト保存先:スクリーンショットを保存するデフォルトのファイルの場所を選択します。 言語:必要に応じてソフトウェアの表示言語を変換することができます。 新しいプロジェクトの名前を変更します:このチェックボックスをオフにすると、新規プロジェクト作成時に「プロジェクト名」ポップアップウィンドウが閉じます。 ハードウェアアクセラレーション:ハードウェアアクセラレーションの有効/無効。( PCに GPUがない場合は、より安定した体験のために無効にしてください )。 |
¶ 4. ソフトウェア機能
¶ 4.1 スキャン
¶ 4.1.1 スキャンコントロール
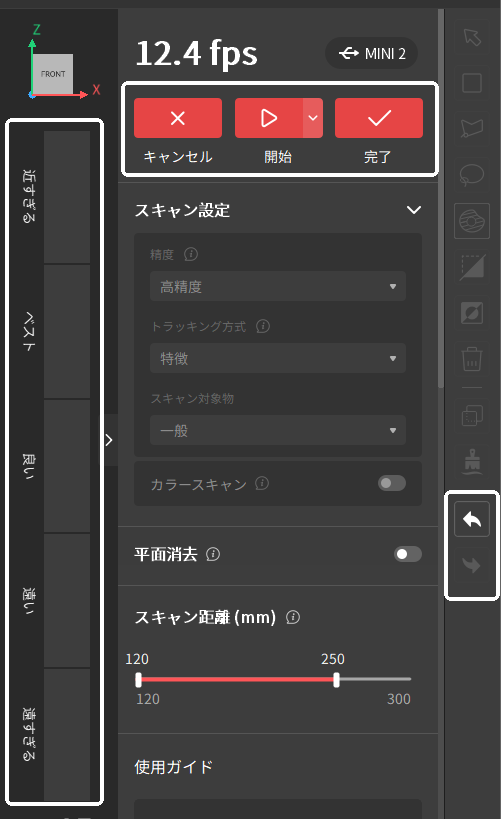 |
|
 : これをクリックすると、キャプチャしたデータがすべて削除されます。
: これをクリックすると、キャプチャしたデータがすべて削除されます。 /
/ : クリックするとスキャンを開始または一時停止します。
: クリックするとスキャンを開始または一時停止します。 : これをクリックすると、スキャンを完了して編集します。
: これをクリックすると、スキャンを完了して編集します。 /
/ : 一時停止中、「やり直す」と「元に戻す」ボタンはスキャンデータを削除したり、追加したりすることができます。これは繰り返し実行できます。
: 一時停止中、「やり直す」と「元に戻す」ボタンはスキャンデータを削除したり、追加したりすることができます。これは繰り返し実行できます。¶ 4.1.2 スキャンモード設定
スキャンを開始する前に、スキャン対象物に適したモードを選択する必要があります。

|
スキャナーは連続スキャンを行い、毎秒複数フレームをキャプチャーします。このモードでは、素早くオブジェクトをキャプチャーすることができます。 ご注意:最大フレームレートはスキャンモードにより決まります。
• 写真測量モードでは、Revo Scan 5 またはスキャナーでのボタンをクリック度に点群フレームを 1 つキャプチャします。 • このモードは、鮮明な色がある被写体や、スキャンしにくい空間をスキャンするには役立ちます。 • 写真測量モードでモデルにうまくアライメントするには、各フレームが最低 50%のオーバーラップが必要です。 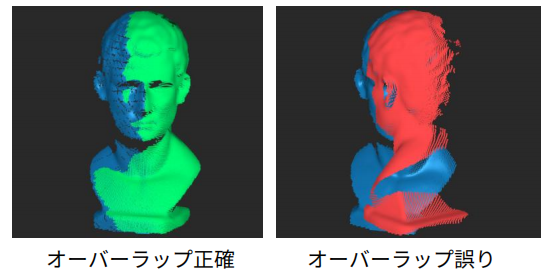 |
¶ 4.1.3 スキャン距離インジケーターバー
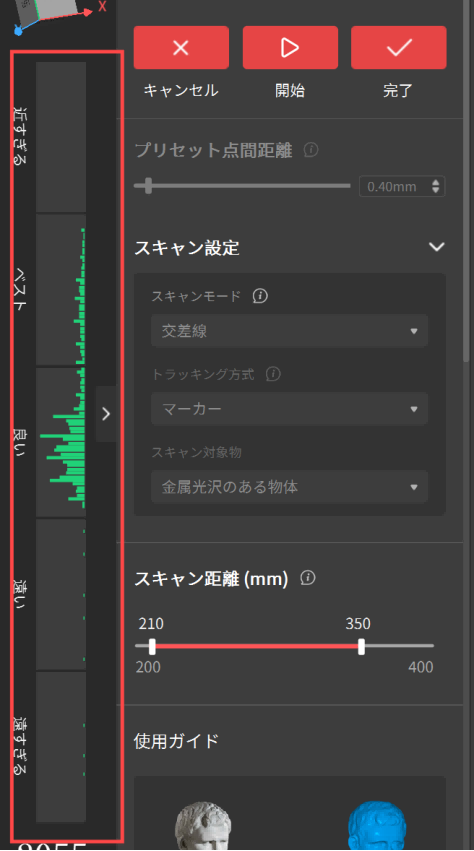 |
スキャナーと対象物の間の距離が最適かどうかを示します。最適な距離では、インジケータバーが緑色に表示されます。 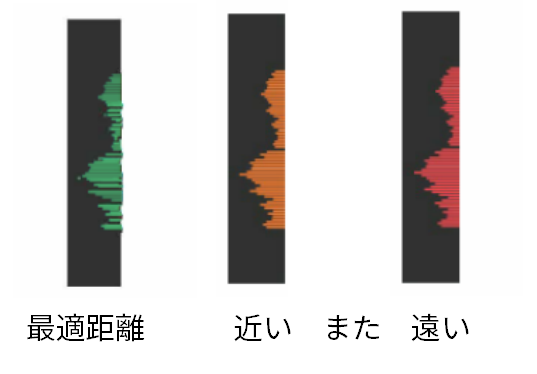 |
¶ 4.1.4 カメラ設定
Depth カメラ
スキャンを開始する前に最も重要な設定は、カメラの露出調整です。
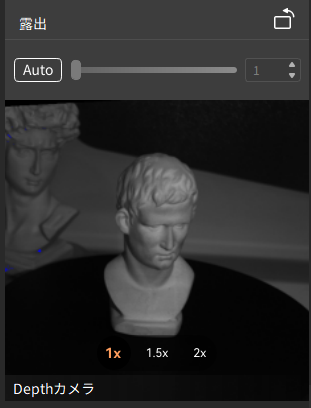 |
• 露出調整 Depth カメラの露出は、自動と手動二つのモードがあります。正確なスキャンを確保するため、Depth ウィンドウに青色または赤色が少ないように露出を調整してください。 対象物の表面の特性に応じて、スキャン中に露出量を調整する必要がある場合があります。  • デジタルズーム 小さな対象物をキャプチャする場合、Depth カメラの最大 2 倍のデジタルズームにより、スキャナーの焦点を合わせやすくなり、対象物の表面データのみをキャプチャすることができます。  • 光学ズーム (MIRACO Plus/POP 3 Plus スキャナーのみ対応しています)スキャナーの構造化光を焦点合わせるために、1.5 倍と 2 倍の光学ズームを提供しており、物体の表面の細部をキャプチャすることをより容易にします。 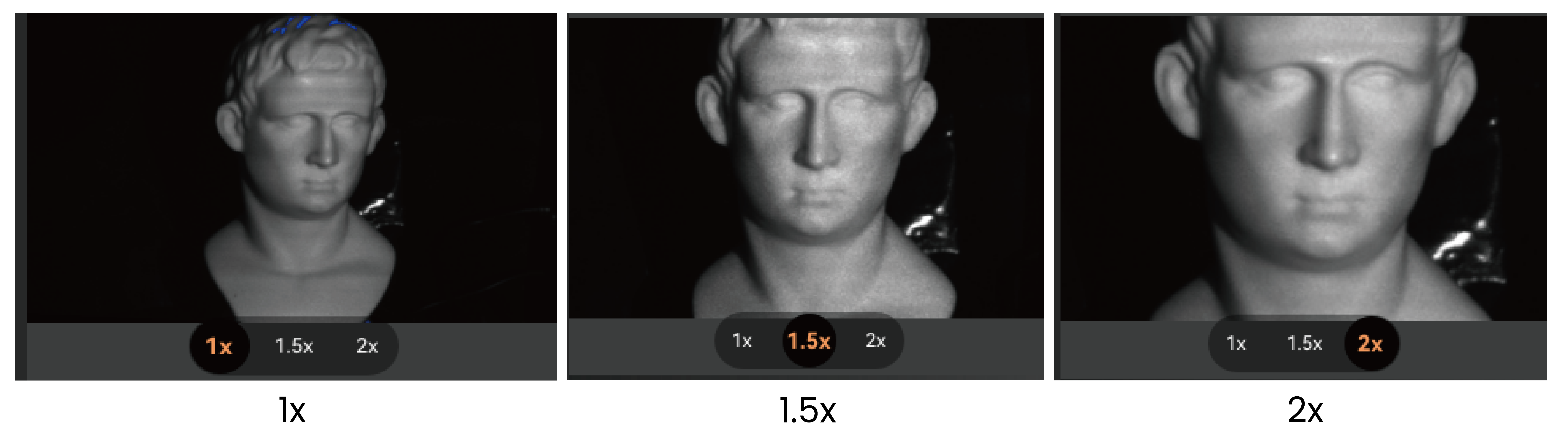 |
RBG カメラ
対象物の色を正確に取り込むには、対象物が柔らかい光で均一に照らされ、RGB カメラの露出とホワイトバランスが調整されていることを確認してください。
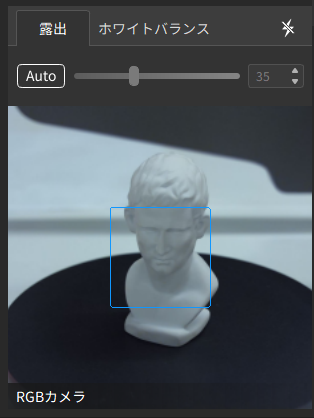 |
• 露出調整 RGB カメラのプレビューウィンドウで色が正確に見えるまで露出を調整するか、または自動モードに設定します。  • ホワイトバランス ホワイトバランスを色が正確に見えるまで調整するか、または自動モードに設定します。 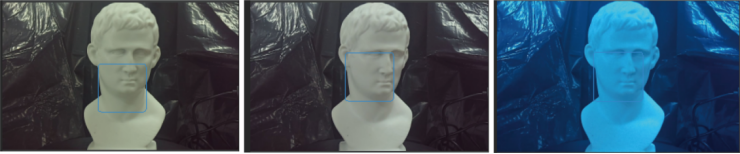 • LED 補助照明 RGB カメラのフラッシュ LED をオンにして、カラースキャンを強化したり、マーカースキャン中にマーカーを見やすくにします。( LED 補助照明搭載スキャナーのみに適します ) |
¶ 4.1.5 スキャン設定
スキャンを開始する前に、スキャン対象物に適した設定を選択する必要があります。
精度
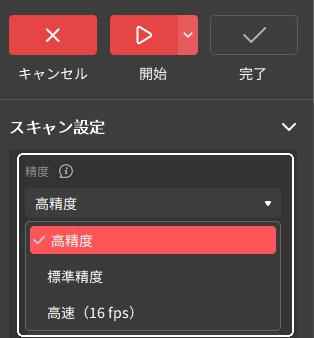 |
• 標準精度:複雑なディテールがない物体に適用します。 • 高精度:豊かなディテールを求めるスキャンに適します。 • 高速:より速いフレームレートとスムーズなフレームステッチで、大型対象物や人のスキャンに適しています。 ご注意:使用可能な精度設定、スキャナー速度、キャプチャ可能な対象物のサイズは、スキャナのモデルによって異なります。 |
トラッキング方式
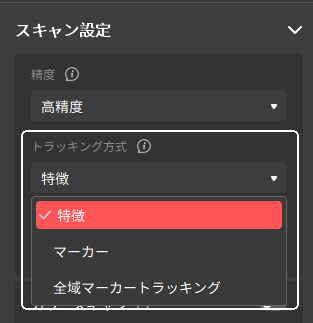 |
• 特徴:表面に豊富で明確な特徴があり、重複するパターンがない対象物のスキャンに適しています。 • マーカー:明確な特徴のない対象物のスキャンに適しています。トラッキング補助用のマーカーと併用する必要があります。 • 全域マーカートラッキング:大型の特徴のない物体をキャプチャするためのものです。手順は 2 つあります。まず、マーカーをキャプチャして全域マーカーファイルを生成します。次に、全域マーカーファイルに基づいて点群をスキャンします。 |
スキャン対象物
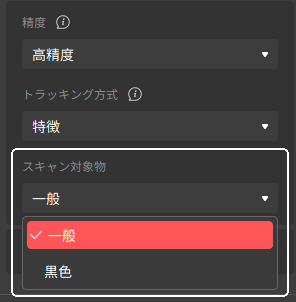 |
• 一般:明確な形状特徴を持つ物体をスキャンするのに最適なモードです。スキャンする際、スキャン対象物が以下のカテゴリーに当てはまらない場合は、このモードを選択してください。 • 黑色:黒い・濃いグレーの服、黒い箱など、表面が暗い物体をスキャンするために設計されますが、黒い革靴や金属など、光を吸収するまたは反射する物体をスキャンするにはスキャンスプレーで処理する必要がある場合があります。 • 顔:人の顔のスキャンに適しています。 • 人体:人体のスキャンに適しています。 • 大型対象物:より大きな対象物の素早くスキャンに適しています。一部のスキャナーでは高速モードでのみ使用できます。 ご注意:スキャン可能なオブジェクトの種類とサイズは、スキャナーのモデルによって異なります。 |
カラースキャン
 |
スキャナーの RGB カメラによりカラーデータを取り込みます。カラースキャンの場合、対象物がソフトライトで均一に照らされていることを確認してください。 ご注意: テクスチャマッピングは、カラースキャンが有効な場合にのみ適用できます。 |
平面消去
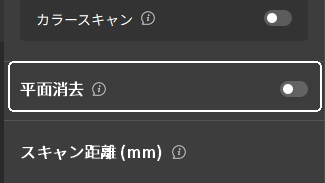 |
「平面消去」をオンにすると、不要な平面( 例: 机や床 )を自動的に検出し消去します。対象物に平らな面が多い場合は、この機能をオフにしてください。 |
スキャン距離
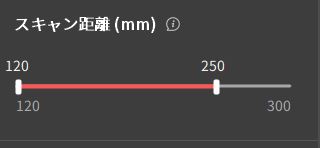 |
スライダーを使用 Depthカメラの動作距離を調整し、不要な背景または前景オブジェクトを除外します。最小距離と最大距離の両方を設定できます。 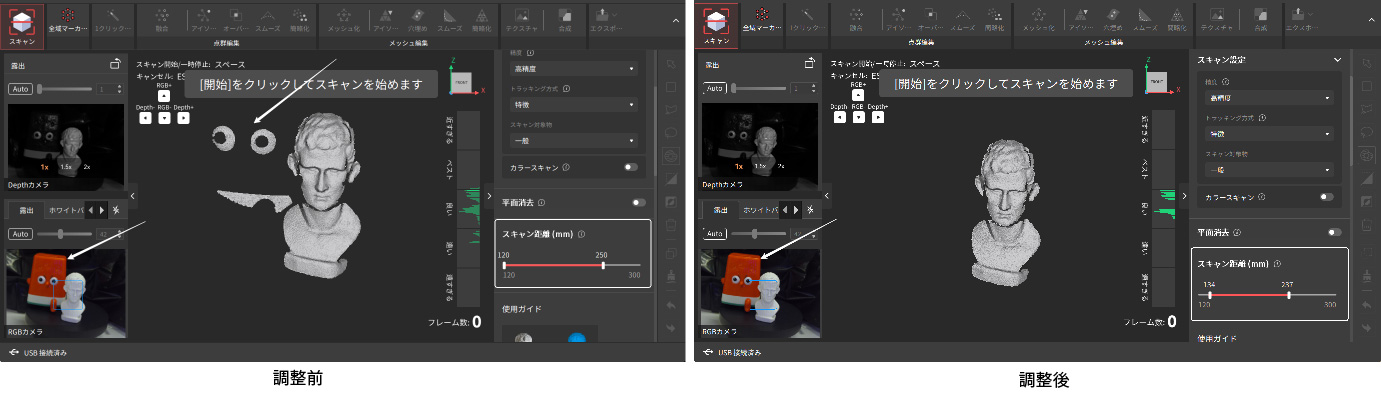 ご注意:同じプロジェクトでは、最初のスキャンで距離を設定すると、それ以降のスキャンでも自動的に保存されます。 |
¶ 4.1.6 スキャン設定の保存
「ファイル」の「スキャン設定を保存」をクリック > 名前を付け、保存先を選択して設定を保存します。
¶ 4.1.7 スキャン設定のインポート
「ファイル」メニューの「スキャン設定をインポート」をクリックし、保存されたスキャン設定をインポートします。
ご注意:同じモデルのスキャナーのスキャン設定のみをインポートできます。
¶ 4.2 モデルの編集
¶ 4.3 モデルとプロジェクト管理
¶ 5. 初めての使用
それでは、Revopoint 3Dスキャナーに付属している小型彫像( RANGE シリーズには付属していません)でスキャンしてみましょう。
¶ 5.1 準備
¶ 5.1.1 スキャナーの接続( PC-USB )
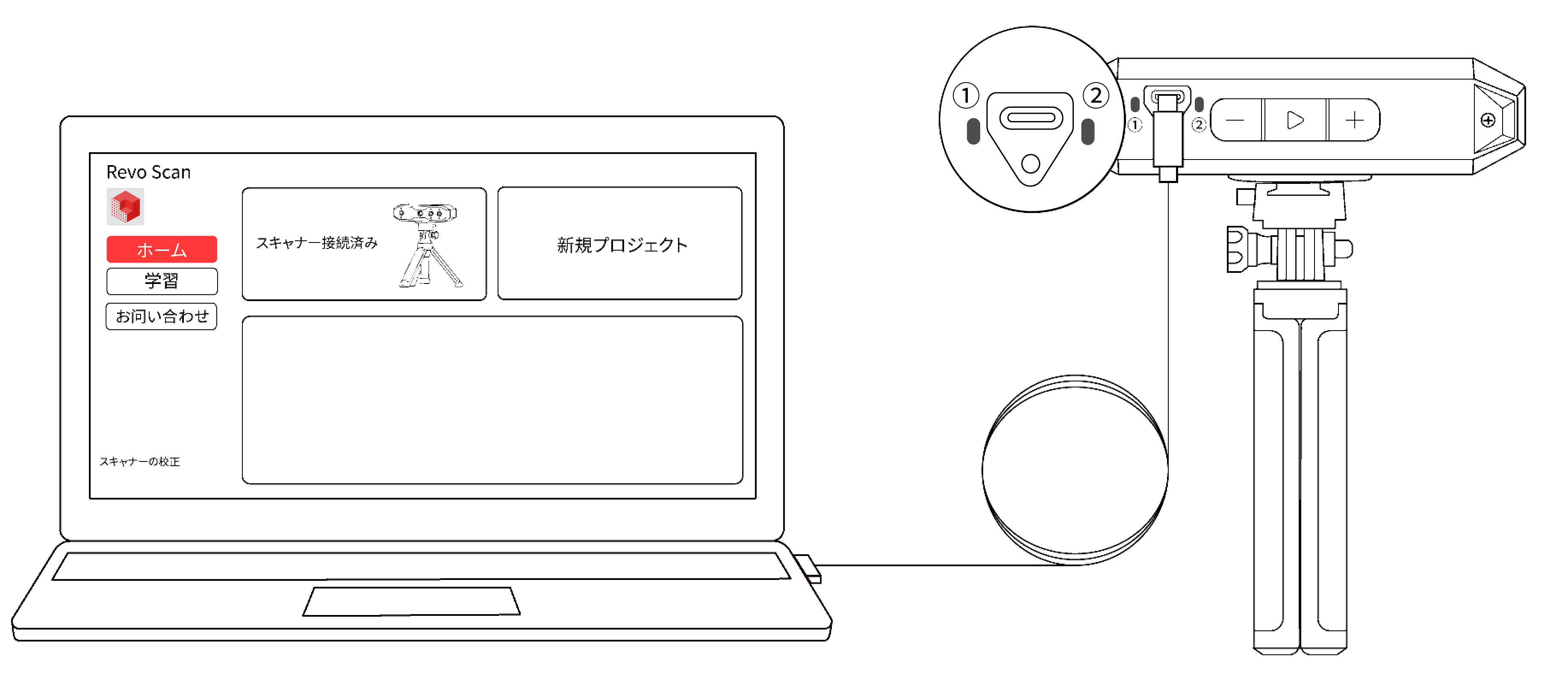
1. USB Type-A to Type-C ケーブルでスキャナを PC に接続します。USB Type-C の端子をスキャナーの背面に差し込み、ネジを締めます。USB Type-A 端( または USB Type-C to Type-A 変換アダプター )をPCに接続します。
2. PC で Revo Scan 5 を開き、スキャナーが表示されるのを待ちます。
¶ 5.1.2 スキャン準備
1. 作業場の散らかりや不要なものを取り除きます。
2. ミニターンテーブルを PC のプラグまたは USB ポートに接続し、電源を入れます。
3. 彫像をターンテーブルの中央に置き、彫像に均等に光が当たるようにしますが、直射日光が当たらないようにしてください。
4. 適切な高さと角度を設定し、スキャナーが対象物を狙うように調整します。
¶ 5.2 スキャンプロセス
¶ 5.2.1 新規プロジェクトの作成
1. 新規プロジェクトをクリックします。
2. プロジェクトに名前を付け、ファイルの保存先を選択し、プロジェクトインターフェイスに入ります。
3. Depth カメラのプレビューウィンドウでバストを中央に配置します。
4. Revo Scan 5 のスキャン距離インジケータが適切な距離を示すまで、スキャナと対象物の距離を調整します。
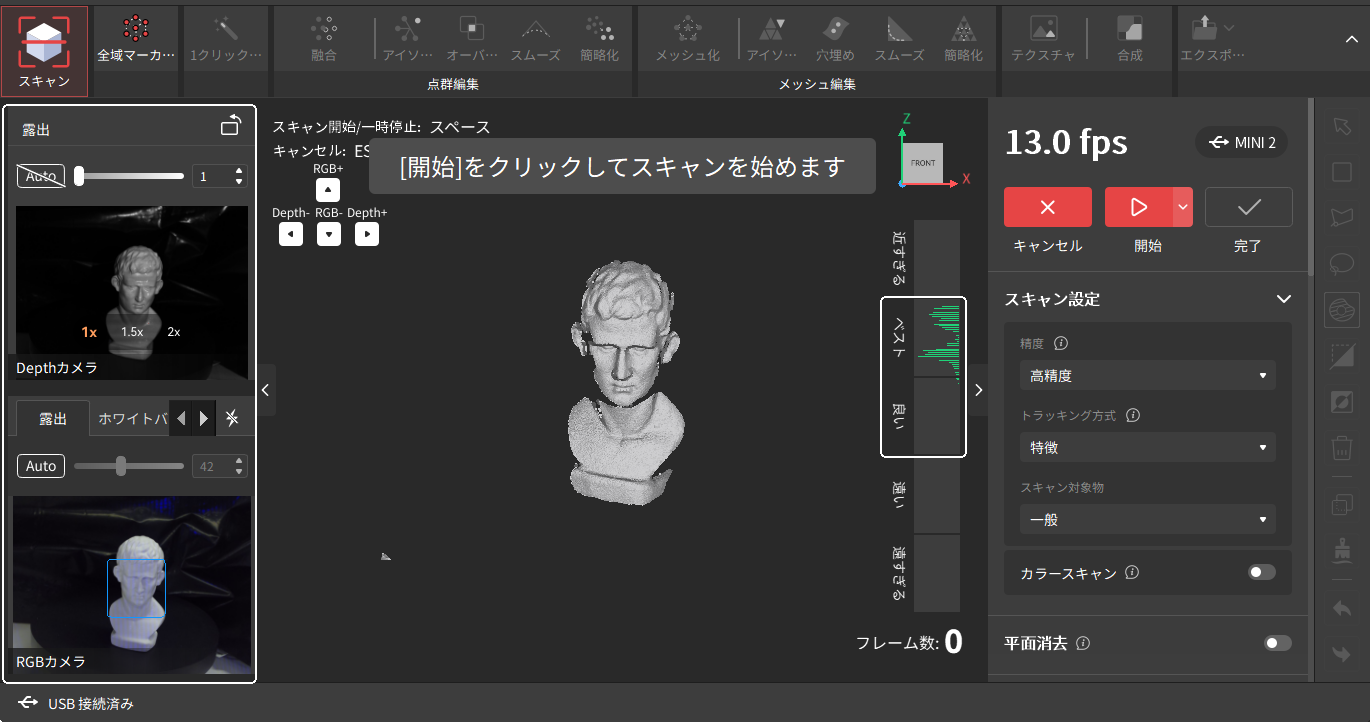
¶ 5.2.2 スキャン設定の選択
1. スキャン設定で「高精度」、「特徴」、「一般」を選択し、「カラー」をオフに切り替えます。
2. Depth カメラの露出を調整するか、オートに設定します。
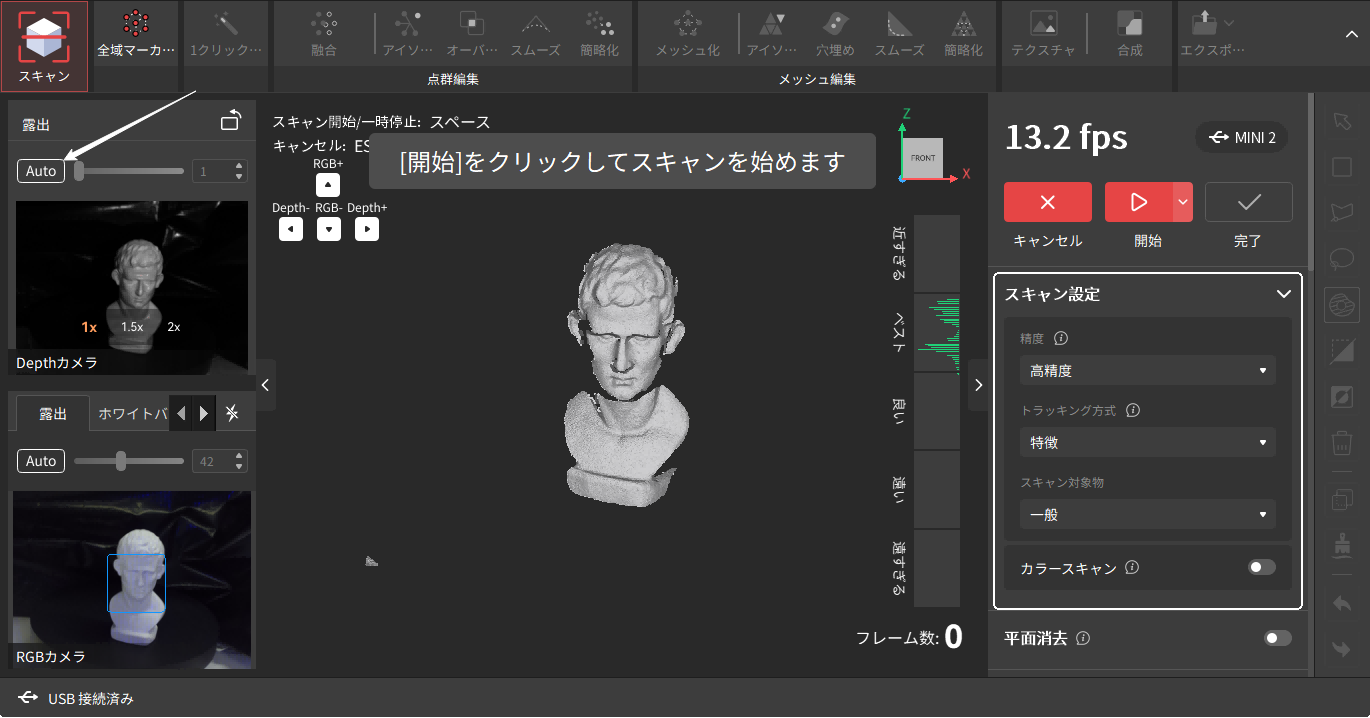
¶ 5.2.3 スキャンを開始する

1. 「開始」ボタンをクリックしてスキャンを開始します。
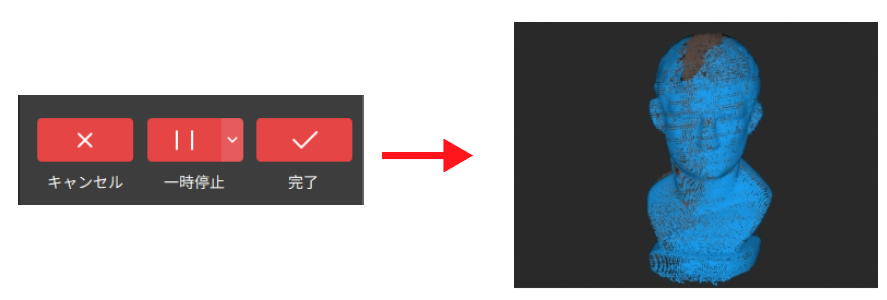
2. ターンテーブルが 1 回転スキャンしたら、一時停止してモデルをチェックしてください。モデルが不完全な場合は、「開始」ボタンをクリックしてスキャンを続行します。
¶ 5.3 スキャンを終了する
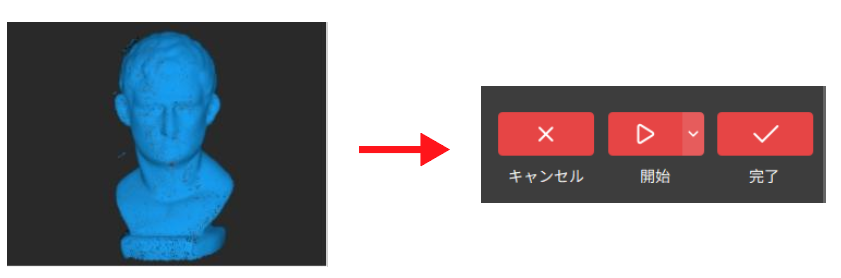
モデルを確認し、問題がなければ「完了」ボタンをクリックします。
¶ 5.4 モデルの編集
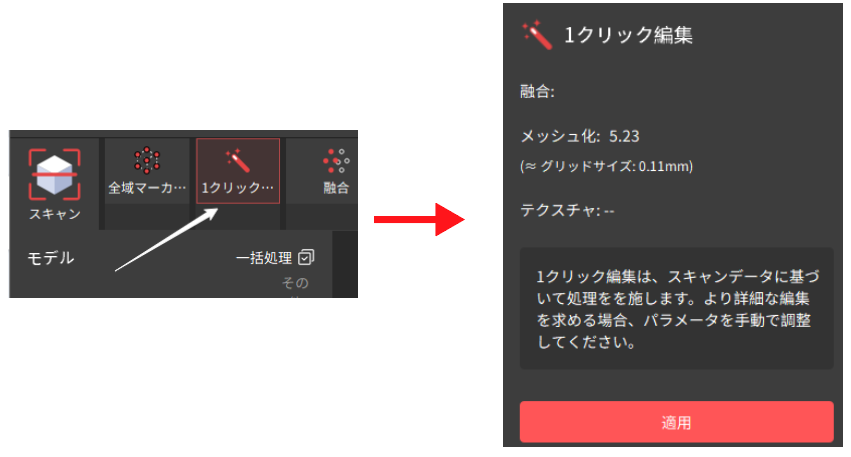
「1クリック編集」ボタンをクリックして、点群を処理します。
¶ 5.5 モデルのエクスポート
エクスポートボタンをクリックし、状態を選択 > ファイルの保存先と形式を選択します。
¶ 6. ヘルプとフィードバック
¶ 6.1 スキャンのコツ
¶ 6.2 アクセサリーの使用
2軸ターンテーブルやハンドヘルドスタビライザーなど、Revopoint のアクセサリーの一部は、 Revo Scan 5 に Bluetooth で接続し、コントロールすることができます。
• Revo Scan 5 を開き、プロジェクトインターフェイスを選びます。
• メニューから「アクセサリー」を選択し、アクセサリーを探して「接続」をクリックします。
• Bluetooth リストでアクセサリーを見つけ、接続してください。
より詳細な手順については、以下をご覧ください。サポート-ダウンロード にアクセスし、「ドキュメント」セクションまでスクロールダウンして、アクセサリーのクイックスタートガイドを入手してください。
¶ 6.3 フィードバック
ソフトウェアを使用中にご不明な点がございましたら、メニューバーの「ヘルプ」から「フィードバック」を選択してご連絡ください。
¶ 6.4 ソフトウェアのアップデート
Revo Scan 5 は常に新しい機能を追加しています。最高のスキャン体験のために、Revo Scan 5 を最新の状態にしてください。アップデートは Revo Scan 5 のポップアップ通知にあるアップデートボタンをクリックすることで自動的にダウンロードされます。
¶ 6.5 カスタマーサービス
本製品に何かご不明な点等がございましたら、お気軽にご連絡ください。メールアドレス: [email protected]電話番号: +1 (888) 807-3339ウェブサイト: revopoint3d.jp
¶ 7. 付録
¶ 7.1 よくある質問
¶ 7.2 用語集
¶ 7.3 ファイル形式
¶ 7.4 キーボードショートカット