¶ 1. 本マニュアルについて
Revopoint 3Dスキャナーユーザーマニュアルへようこそ! スキャナーを初めて使用する前に、本マニュアルをお読みいただき、正しく安全に使用してください。ナビゲーションバーのいずれかの見出しをクリックすると、対応する章へ素早く移動できます。
マニュアルのダウンロード
関連ソフトウェアマニュアルの電子版が必要な場合は、マニュアル左側の章ナビゲーション最下部にある印刷形式ボタンをクリックし、プリンターに「PDF として保存」を選択して保存すると、本マニュアルの PDF 版をダウンロードできます。
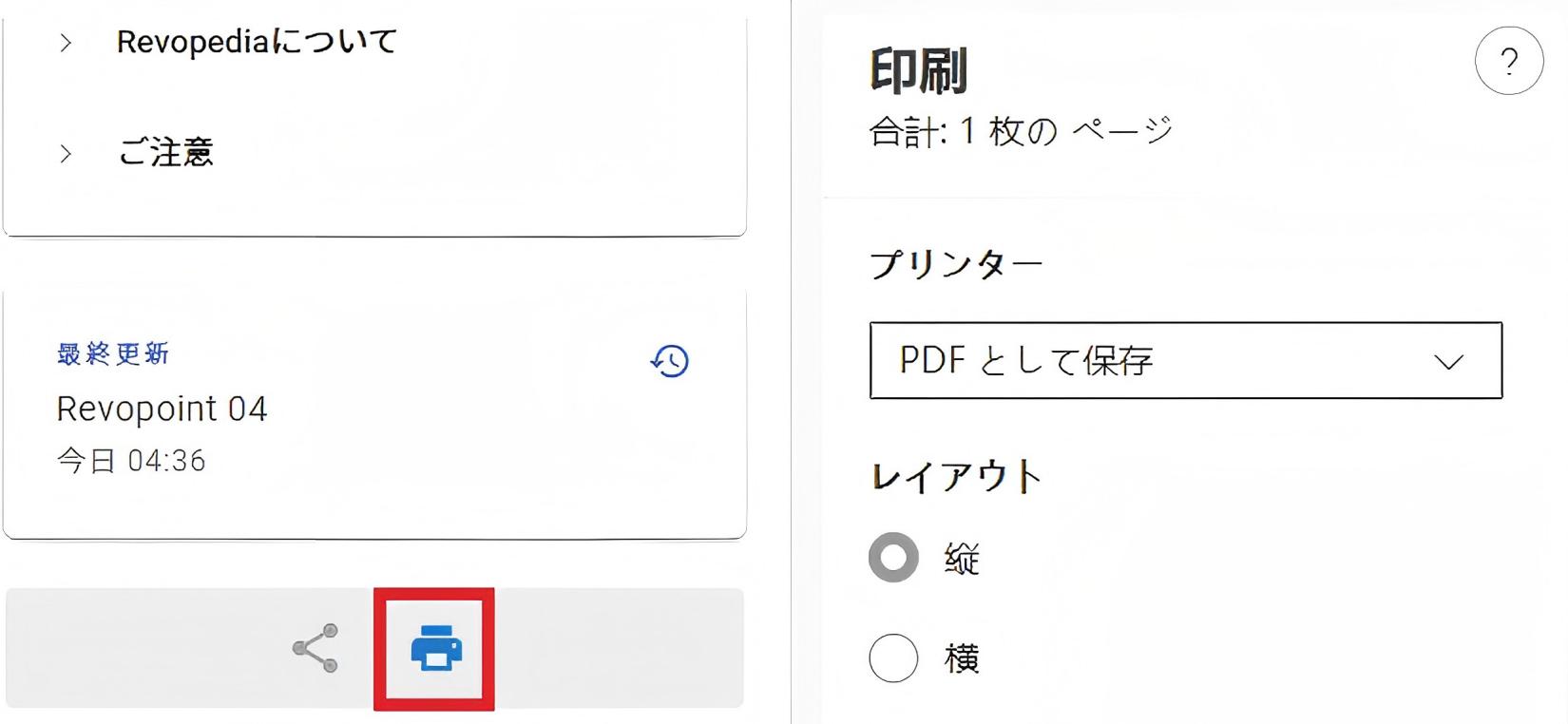
ご注意:ソフトウェアは継続的に更新されます。本マニュアルの内容や具体的な操作は実際のソフトウェア画面を参照してください。
¶ 1.1 ご使用前に
- 本マニュアルの内容は、POP 4 3Dスキャナーのみに適用されます。POP 4 3Dスキャナーのインストールと設定、機器接続、スキャナーの校正、初回スキャン操作などを案内し、ユーザーが本製品を正しく効率的に操作し、そのスキャン性能を十分に発揮できるようにすることを目的としています。
- 製品の最新機能や改良点に対応するため、本マニュアルは随時更新されています。
¶ 1.2 使用上の安全事項
- 本製品はクラス 1 レーザープロジェクターを使用しています。至近距離でレーザーを直接見ないでください。詳細はクラス 1 の安全基準をご参照ください。また、レーザービームの反射を避けるため、鏡やガラスなどの反射面をビームの進行方向に置かないようご注意ください。
- スキャナーを水などの液体に近づけない・浸さないでください。また、スキャナーに強い衝撃を与えないでください。
- 本製品の動作環境温度範囲は0°C~40°C(32°F~104°F)です。この範囲内でご使用ください。
- 製品のいかなる部分も取り外し、分解または改造しないでください。製品を改造すると、安全規格に適合しなくなるおそれがあります。
- 本製品は子どもの手の届かない場所に保管してください。
¶ 1.3 オンラインリソース



¶ 2.POP 4について
¶ 2.1 製品紹介
POP 4 は、ブルーライトと近赤外のデュアルバンドスキャンに対応したポータブル3Dスキャナーです。クロスラインレーザー、シングルラインレーザー、フルフィールド構造化光、VCSEL構造化光、ハイブリッド構造化光など複数のスキャンモードを搭載し、高反射表面、深穴、屋外の強い光などの複雑なシーンに対応できます。
本機を Revo Scan 6 と組み合わせることで、AIオブジェクトセグメンテーション機能を利用して対象点群をワンクリックで抽出でき、3DGSと等倍率の3Dモデル出力にも対応します。WiFi でPCやスマートフォンに接続でき、バッテリーグリップと組み合わせることで、モバイル環境でもより便利に使用できます。付属の Revo Scan 6 ソフトウェアによりデータ処理を行えるほか、Revo Measure や Revo Design と連携して測定やリバースエンジニアリングも行えます。また、PCとスマートフォン間の画面共有やクロスデバイス操作にも対応しています。
¶ 2.2 パッケージ内容
ご使用の前に、同梱の部品リストを参照してすべての部品を点検し、欠品や破損がないかご確認ください。


¶ 2.3 製品外観

¶ 3. ソフトウェア要件&機能互換性
¶ 3.1 ダウンロードとシステム要件
POP 4はRevo Scan 6 (PC)またはRevo Scan 6(モバイル版)と組み合わせて使用します。使用前に、対応ソフトウェアをダウンロードしてインストールしてください。
|
ソフトウェア名 |
Revo Scan 6 (PC) |
Revo Scan 6(モバイル版) |
|
ダウンロード先 |
またはスマートフォンのアプリストア |
|
|
システム要件 |
最小PC要件: Windows:Win10/11(64ビット) RAM:≥16 GB CPU:Intel i7 13th GenまたはAMD Ryzen 7 5800 GPU:NVIDIA GeForce RTX 3060(8 GB) macOS:macOS 11.0またはそれ以降 RAM:≥ 16 GB CPU:M1 Pro/Max/Ultra 推奨PC要件: Windows:Win10/11(64ビット) RAM:≥32 GB CPU:Intel i9 12th Gen 以上 GPU:NVIDIA RTX 4060 (8 GB)以上 macOS:macOS 11.0またはそれ以降 RAM:≥ 24 GB CPU:M3 Pro/Max/Ultra以上 |
モバイル端末要件:(iOS版Revo Scan 6は近日公開予定) Android:CPU:Snapdragon 8 Gen1、Dimensity 9000、Kirin 9000Sと同等性能以上 メモリ:12 GB以上 OSバージョン:Android 11以降 ストレージ:≥128 GB iPhone:iPhone X以降 iOS 14.0またはそれ以降 RAM:>4 GB ストレージ:≥64 GB iPad:第10世代またはそれ以降 |
¶ 3.2 プラットフォームおよび機能互換性
| プラットフォーム&OS | ソフトウェア対応有無 | ラインレーザー GPU アクセラレーション | AI インテリジェントセグメンテーション | 3DGS |
|---|---|---|---|---|
| Windows-NVIDIA | ✓ | ✓ | ✓ | ✓ |
| Windows-AMD | ✓ | ✓ | ✕ | ✕ |
| macOS - ARM64 | ✓ | ✓ | ✓ | ✓ |
| Android | ✓ | ✕ | ✕ | ✓① |
| iOS / iPadOS | ✓ | ✕ | ✕ | ✓① |
|
備考: ① モバイルデバイスはデータ取得に使用でき、PC に転送して 3DGS 計算を行えます。 ② macOS - x86_64 および LINUX プラットフォームには対応していません。 |
||||
ソフトウェアの各機能および操作方法の詳細については、Revo Scan 6 ソフトウェアユーザーマニュアルをご参照ください。
¶ 4. スキャナーの接続
スキャン品質を確保するため、スキャナーはPCに直接接続し、ドッキングステーションの使用は避けてください。
¶ 5. スキャナーのキャリブレーション
Revo Scan 6 では、最適な精度を得るために POP 4 を再校正できます。ソフトウェアの校正機能で現在の精度を先に確認し、結果が不合格の場合は、画面の案内に従って校正を完了してください。
¶ 5.1 キャリブレーション前の準備
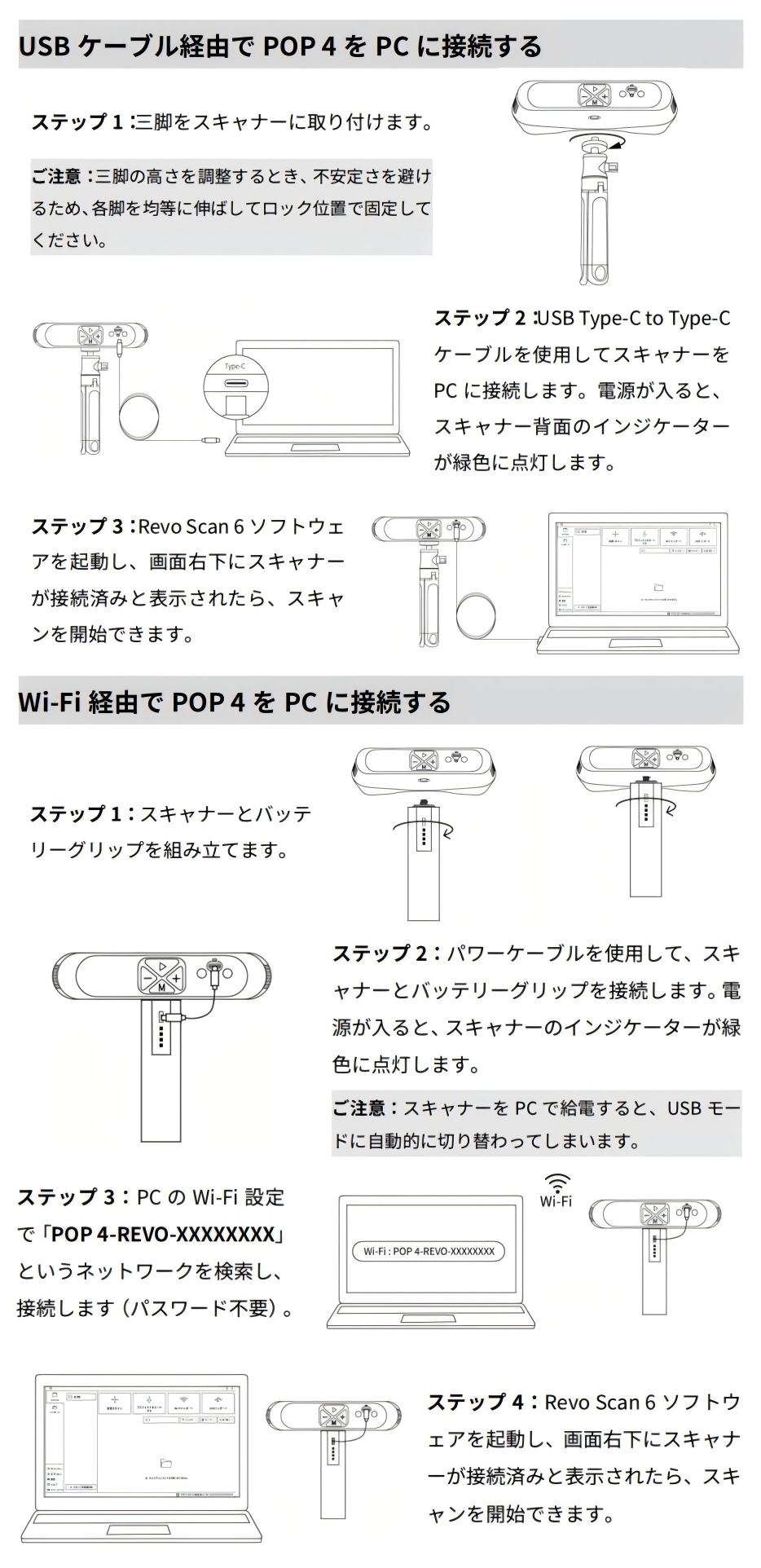
① USB Type-C - Type-CデータケーブルでスキャナーをPCに接続し、PC版Revo Scan 6を起動します。
ご注意: スキャナーをキャリブレーションする前に、最適な精度を確保するため、10分間のウォームアップが必要です。
② キャリブレーションボードを設置し、ソフトウェアのホーム画面左下にある「キャリブレーション」をクリックして、キャリブレーション手順に入ります。
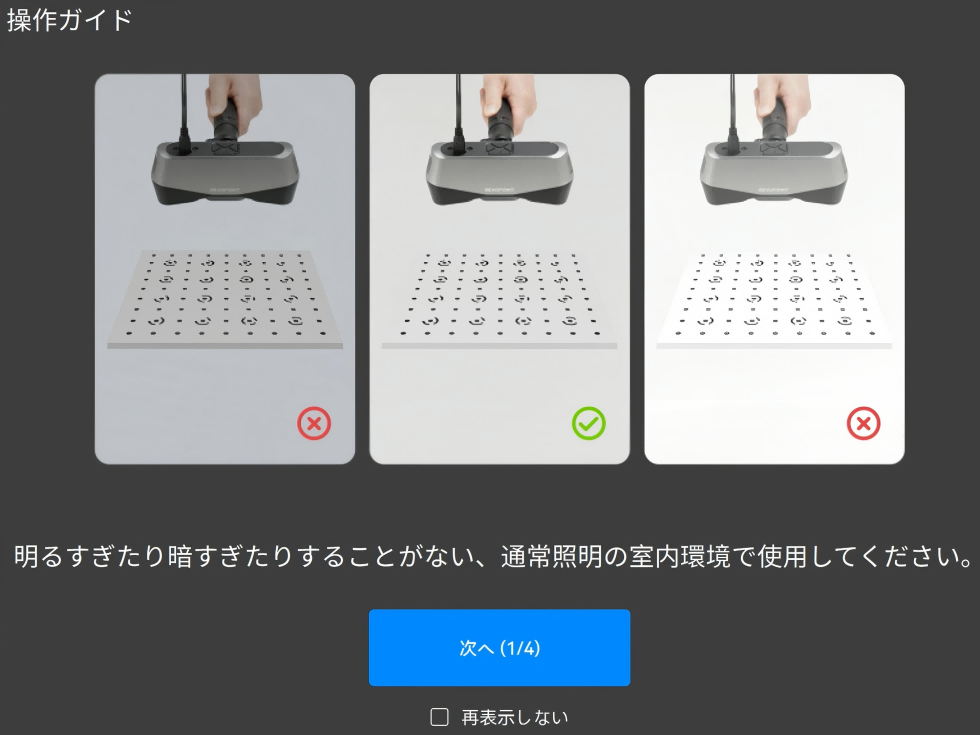
③ 周囲の照明を調整し、暗すぎる環境や明るすぎる環境を避けてください。
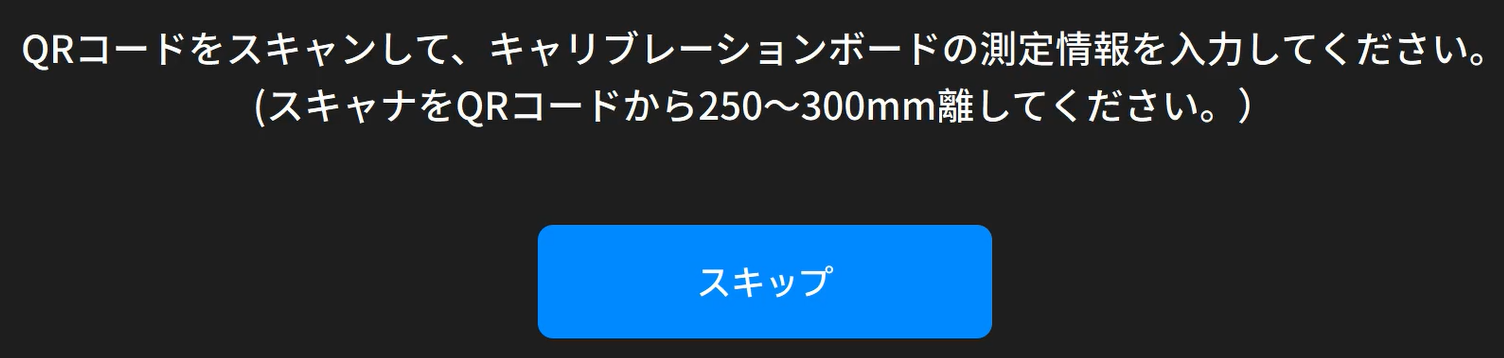
④ スキャナーでキャリブレーションボード裏面のQRコードをスキャンし、キャリブレーションボードの計量情報を読み込みます。
⑤ キャリブレーションボードを設置し、操作ガイド図に従ってキャリブレーションの練習を行います。
⑥ 練習完了後、スキャナー精度検査ページに進み、検査結果に応じてキャリブレーションを続行するかどうかを選択します。
¶ 5.2 キャリブレーション
① 左側のガイド図および対応するスライダーに従って、カメラの傾斜角、俯仰角、高さを調整します。
② 上部の進行バーに従い、水平、左側、右側、前側、後側の5つの角度で順にデータ収集を完了します。
③ キャリブレーション精度が合格したら、キャリブレーション結果を保存します。
④ 「完了」をクリックして起動画面に戻ります。カメラは自動的に再起動し、キャリブレーションが完了します。
¶ 6. トラキングモード & スキャンモード
POP 4 が対応する 4 種類のトラッキング方式と 4 種類のスキャンモードでは、トラッキング方式が各フレームのスキャンデータをどのようにアライメント・トラッキングするかを決定し、スキャンモードがスキャンデータの取得方法を決定します。対象物の特徴、必要なディテール、使用シーンに応じて適切なモードを選択できます。
¶ トラッキング方式
| トラッキング方式 | 適用シーン | 代表的な対象物 |
|---|---|---|
 |
表面の幾何学的特徴が明確で、起伏の豊かな形状の対象物に適しています。対象物自体の構造特徴に基づいてアライメント・トラッキングを行えます。 | 人体、頭部、彫像、フィギュア、ぬいぐるみ、靴、石膏像、工芸装飾品など |
 |
表面が比較的平坦で、幾何学的特徴が目立たない、または形状が規則的で対称な対象物に適しています。マーカーを認識してアライメント・トラッキングを行います。 | 立方体、円柱、球体、規則的な箱形、平板、配管、タンク、滑らかな外装など |
 |
サイズが大きく、幾何学的特徴が目立たない対象物に適しています。全域マーカーにより、広範囲スキャン時のトラッキング安定性を向上させます。 | 自動車部品、大型彫刻、家具、大型金型、大型筐体、機器の外装、ドアパネル、板金部品など |
 |
表面に明確な色のテクスチャ、パターン、印刷情報、または天然の模様がある対象物に適しています。このモードは対象物の色とテクスチャ特徴に基づいてアライメント・トラッキングを行うため、形状特徴は目立たないものの、表面の模様、パターン、色差、文字情報が豊富なスキャン対象に適しています。 | カラーモデル、プリントカーペット、ラベル付きパッケージ箱、書籍の表紙、木目のある対象物、石目のある対象物、文字表示付き製品、装飾画類の対象物など |
¶ スキャンモード
| トラッキング方式 | 特徴、マーカー、全域マーカー、カラー |
| 適用シーン | 幾何学的特徴を持つ対象物のマーカーレス自由アライメント、または特徴のない対象物のマーカーアライメントに適しています。精細な点群モデリングや高精度のディテール取得に適しています。 |
| 屋外スキャン対応 | × |
| スマホスキャン対応 | √ |
| トラッキング方式 | 特徴、カラー |
| 適用シーン | マーカーレス高速スキャンに対応し、データ取得がよりスムーズかつ高速です。 |
| 屋外スキャン対応 | √ |
| スマホスキャン対応 | √ |
| トラッキング方式 | 特徴、彩色拼接 |
| 適用シーン | 速度と精度を両立し、高速移動中でも高精度な点群を取得できます。対象物表面の高速・高品質なモデリングに適しています。 |
| 屋外スキャン対応 | × |
| スマホスキャン対応 | √ |
| トラッキング方式 | マーカー、全域マーカー |
| 適用シーン | 高反射の金属表面や黒い対象物にも的確に対応できます。耐干渉性が高く、複雑な表面のスキャンに適しています。 |
| 屋外スキャン対応 | √ |
| スマホスキャン対応 | × |
| トラッキング方式 | マーカー、全域マーカー |
| 適用シーン | 局所的な深穴や深溝など、狭い部位の3Dデータを高精度に取得できます。 |
| 屋外スキャン対応 | √ |
| スマホスキャン対応 | × |
¶ 📖 モード選択ガイド
表面に明確な幾何学的特徴がある(例:彫像/人体/フィギュア/靴/石膏像/工芸装飾品など)
一般的な高速モデリング用途(精度/ディテール優先)
1. フルフィールドHD
2. ハイブリッドHD
スキャン対象が暗色または大型の対象物
規則的・対称形状/広い平面を持つ対象物(例:立方体/円柱/球体/平板/配管/滑らかな外装など)
一般的な高速モデリング用途
高反射金属/純黒の対象物/深穴・深溝構造をスキャンする
サイズが大きく、幾何学的特徴が目立たない(例:自動車部品/大型彫刻/家具/大型箱体/ドアパネル/板金部品など)
一般的な高速モデリング用途
高反射金属/純黒の対象物/深穴・深溝構造をスキャンする
表面に明確な色彩/テクスチャ/パターンがある(例:彩色モデル/プリントカーペット/書籍の表紙/木目・石目の部品/表示付きパッケージ/装飾画など)
一般的な高速モデリング用途(精度/ディテール優先)
1. フルフィールドHD
2. ハイブリッドHD
3. VCSEL高速
スキャン対象が暗色または大型の対象物
¶ 7. 初めてのスキャン
¶ 7.1 フルフィールドHD
今回のスキャンでは、アグリッパの小型彫像を例に、フルフィールドHDスキャンの操作手順を紹介します。
¶ 7.1.1 スキャン開始
¶ 新規スキャン
ファイル管理ページで「新規スキャン」をクリックします。
① トラッキング方式で「特徴」を選択し、スキャンモードで「フルフィールドHD」を選択します。
② スキャンファイル名を入力し、「確認」をクリックするとスキャン画面に入ります。
¶ スキャン設定&操作
① スキャン精度はデフォルトで「高精度」に設定されており、スキャン対象物は「一般」を選択します。
② 左側のカメラプレビューウィンドウでモデル位置を確認し、モデルがカメラの視野内にあることを確認します。
③ スキャナーとモデルの距離を調整し、距離ヒストグラムのカラーバーが緑色になるようにしてください。
④ Depthカメラの露出を調整し、Depthカメラのプレビューウィンドウで対象物表面の赤色または青色ができるだけ少なくなるようにします。灰色が最適です。
⑤ カラーモデルが必要な場合は、カラースキャンを有効にしてください。
⑥ 上記のパラメーターを設定したら、「スキャン」ボタンをクリックしてスキャンを開始します。
⑦ スキャン中は、一時停止してモデル表示エリアで進行状況をリアルタイムに確認できます。スキャンが不完全な場合は、「スキャン」ボタンをクリックしてスキャンを続行します。
¶ 7.1.2 スキャン完了
以下の基準を参考に、スキャンを終了できるかどうかを判断できます。
1) スキャンプレビューエリアのモデルが完全に表示されているか
画面上のリアルタイムモデルプレビューが、スキャン対象物のすべての表面をカバーしていることを確認してください。特に、見落としやすい底面、背面、隙間などの領域に注意してください。スキャン中は一時停止して、点群またはプレビューモデル内に大きな空白領域や未取得の構造がないか確認できます(小さな穴や欠損部分は後処理で手動穴埋めが可能です)。
スキャンが完了したら、「完了」ボタンをクリックしてスキャンを終了します。引き続きモデルをスキャンする必要がある場合は、「スキャン」ボタンをクリックしてスキャンを続行できます。
¶ 7.2 VCSEL高速
今回のスキャンでは、大型鹿彫像を例に、VCSEL高速スキャンの操作手順を紹介します。
¶ 7.2.1 スキャン開始
¶ 新規スキャン
ファイル管理ページで「新規スキャン」をクリックします。
① トラッキング方式で「特徴」を選択し、スキャンモードで「VCSEL高速」を選択します。
② スキャンファイル名を入力し、「確認」をクリックするとスキャン画面に入ります。
¶ スキャン設定&操作
① スキャン精度はデフォルトで「高精度」に設定されており、スキャン対象物は「一般」を選択します。
② 左側のカメラプレビューウィンドウでモデル位置を確認し、モデルがカメラの視野内にあることを確認します。
③ スキャナーとモデルの距離を調整し、距離ヒストグラムのカラーバーが緑色になるようにしてください。
④ Depthカメラの露出を調整し、Depthカメラのプレビューウィンドウで対象物表面の赤色または青色ができるだけ少なくなるようにします。灰色が最適です。
⑤ カラーモデルが必要な場合は、カラースキャンを有効にしてください。
⑥ 上記のパラメーターを設定したら、「スキャン」ボタンをクリックしてスキャンを開始します。
⑦ スキャン中は、一時停止してモデル表示エリアで進行状況をリアルタイムに確認できます。スキャンが不完全な場合は、「スキャン」ボタンをクリックしてスキャンを続行します。
¶ 7.2.2 スキャン完了
以下の基準を参考に、スキャンを終了できるかどうかを判断できます。
1) スキャンプレビューエリアのモデルが完全に表示されているか
画面上のリアルタイムモデルプレビューが、スキャン対象物のすべての表面をカバーしていることを確認してください。特に、見落としやすい底面、背面、隙間などの領域に注意してください。スキャン中は一時停止して、点群またはプレビューモデル内に大きな空白領域や未取得の構造がないか確認できます(小さな穴や欠損部分は後処理で手動穴埋めが可能です)。
スキャンが完了したら、「完了」ボタンをクリックしてスキャンを終了します。引き続きモデルをスキャンする必要がある場合は、「スキャン」ボタンをクリックしてスキャンを続行できます。
¶ 7.3 ハイブリッドHD
今回のスキャンでは、カラーの鳥の工芸品を例に、ハイブリッドHDスキャンモードの操作手順を紹介します。
¶ 7.3.1 スキャン開始
¶ 新規スキャン
ファイル管理ページで「新規スキャン」をクリックします。
① トラッキング方式で「カラー」を選択し、スキャンモードで「ハイブリッドHD」を選択します。
② スキャンファイル名を入力し、「確認」をクリックするとスキャン画面に入ります。
¶ スキャン設定&操作
① スキャン精度はデフォルトで「高精度」に設定されており、スキャン対象物は「一般」を選択します。
② 左側のカメラプレビューウィンドウでモデル位置を確認し、モデルがカメラの視野内にあることを確認します。
③ スキャナーとモデルの距離を調整し、距離ヒストグラムのカラーバーが緑色になるようにしてください。
④ Depthカメラの露出を調整し、Depthカメラのプレビューウィンドウで対象物表面の赤色または青色ができるだけ少なくなるようにします。灰色が最適です。
⑤ カラートラッキングモードでは、トラッキングの過程で色情報も同時に取得されるため、カラースキャンを個別に有効にする設定はありません。
⑥ 上記のパラメーターを設定したら、「スキャン」ボタンをクリックしてスキャンを開始します。
⑦ スキャン中は、一時停止してモデル表示エリアで進行状況をリアルタイムに確認できます。スキャンが不完全な場合は、「スキャン」ボタンをクリックしてスキャンを続行します。
¶ 7.3.2 スキャン完了
以下の基準を参考に、スキャンを終了できるかどうかを判断できます。
1) スキャンプレビューエリアのモデルが完全に表示されているか
画面上のリアルタイムモデルプレビューが、スキャン対象物のすべての表面をカバーしていることを確認してください。特に、見落としやすい底面、背面、隙間などの領域に注意してください。スキャン中は一時停止して、点群またはプレビューモデル内に大きな空白領域や未取得の構造がないか確認できます(小さな穴や欠損部分は後処理で手動穴埋めが可能です)。
スキャンが完了したら、「完了」ボタンをクリックしてスキャンを終了します。引き続きモデルをスキャンする必要がある場合は、「スキャン」ボタンをクリックしてスキャンを続行できます。
¶ 7.4 レーザーラインスキャン
¶ 7.4.1 スキャン前の準備
対象物の処理
- レーザーラインモードを使用する場合は、マーカーを併用する必要があります。
マーカーを配置しすぎないようにしてください。ただし、スキャナーの1フレーム内で少なくとも 5 個の不規則に配置されたマーカーが認識できる必要があります。
理想的な精度を得るため、マーカーは局所的に平らな面に貼り、曲面には貼らないでください。また、マーカー付きの柔らかいマットや布は使用しないでください。
マーカーブロックキットを使って、より理想的で完全なスキャン環境を構築することもできます。

- スキャン用スプレーを使用する
ご注意: マーカーブロックキットおよびスキャン用スプレーは、Revopoint 公式ストアで購入できます。
対象物処理の詳細についてはスキャンのコツ--対象物の処理をご参照ください
¶ 7.4.2 スキャン開始
¶ 新規スキャン
ファイル管理ページで「新規スキャン」をクリックします。
① 「マーカー」または「全域マーカー」を選択します。スキャンモードでは「レーザーライン」を選択します。モード選択の詳細については、第 6 章 トラキングモードとスキャンモードをご参照ください
② スキャンファイル名を入力し、「確認」をクリックしてスキャン画面に入ります。
¶ スキャン設定&スキャン操作
① スキャンページに入ります。レーザーの種類を選択します:シングルライン/交差線
② スキャン精度とスキャン対象物タイプを選択します。
③ 目標点間距離を設定します。目標点間距離が大きいほどスキャン速度は速くなります。目標点間距離が小さいほどモデルは精細になりますが、スキャン速度は相対的に遅くなります。
④ スキャナーと対象物の距離を調整し、距離ヒストグラム上のカラーバーが緑色で表示されるようにしてください。
⑤ Depthカメラの露出を調整し、Depthカメラのプレビューウィンドウでレーザーラインがはっきり見えるようにしてください。
⑥ 以上のパラメーターを設定したら、「開始」ボタンをクリックしてスキャンを開始します。
⑦ スキャン中は、一時停止してモデル表示エリアでスキャンの進行状況をリアルタイムで確認できます。スキャンが不完全な場合は、「開始」ボタンをクリックしてスキャンを続行します。
¶ 7.4.3 スキャン完了
以下の基準を参考に、スキャンを終了できるかどうかを判断できます。
スキャンプレビューエリアのモデルが完全に表示されているか
→ 画面上のリアルタイムモデルプレビューが、スキャン対象物のすべての表面をカバーしていることを確認してください。特に、見落としやすい底面、背面、隙間などの領域に注意してください。スキャン中は一時停止して、点群またはプレビューモデル内に大きな空白領域や未取得の構造がないか確認できます(小さな穴や欠損部分は後処理で手動穴埋めが可能です)。
-incomplete.png)
スキャンが完了したら、「完了」ボタンをクリックしてスキャンを終了します。引き続きモデルをスキャンする必要がある場合は、「再開」ボタンをクリックしてスキャンを続行できます。
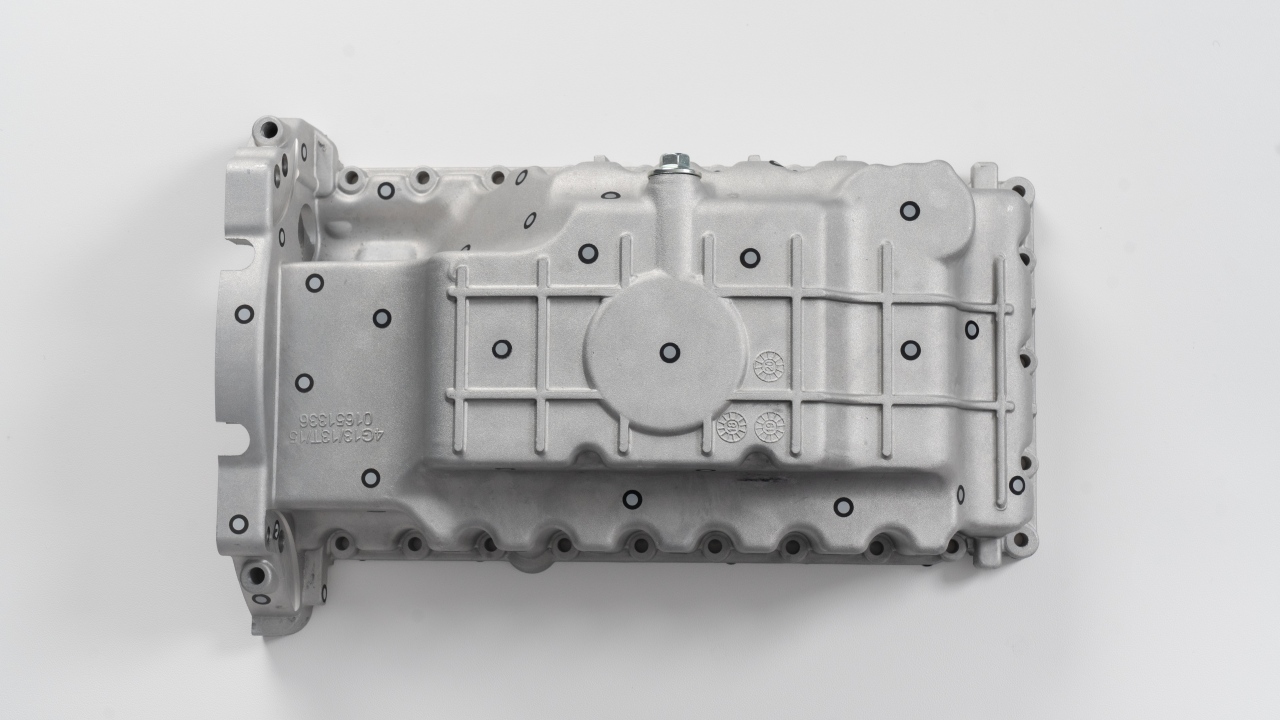
¶ 7.5 屋外スキャン
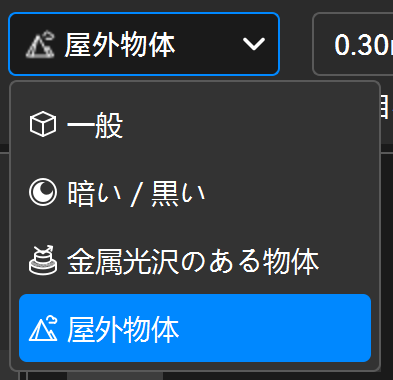
レーザーラインおよびVCSEL高速モードは屋外スキャンに対応しています。
屋外スキャンを行う必要がある場合は、スキャン設定内の「スキャン対象物」で「屋外物体」を選択してください。
- 強い日差しの下でレーザーラインモードを使用して屋外スキャンを行う場合は、屋外用ブルーライトフィルターの使用をおすすめします。これによりスキャン効果を最適化できます。
- 屋外用ブルーライトレンズフィルターは、フルフィールドHDスキャン、ハイブリッドHDスキャン、およびVCSEL高速スキャンモードには対応していません。
- 雨天や強風時のスキャンは避けてください。機器の浸水による故障や、対象物表面の湿気によるデータ精度低下を防ぐためです。
¶ 7.6 その他の内容
より良いスキャン結果を得るために、スキャン開始前に適切なパラメーターを理解し、設定することをおすすめします。パラメーター設定は、モデルの完全性、鮮明さ、後処理効率に直接影響します。Revo Scan 6 ソフトウェアマニュアルのスキャン設定をクリックすると、スキャンパラメーター設定やカメラ設定などについてさらに詳しく確認できます。
¶ 8. モデル処理とアドバンス機能
¶ 8.1 1クリック編集
¶ 8.2 手動処理
手動処理モードは、より高い柔軟性を提供し、モデル品質に対してより高い要求を持つユーザーに適しています。機能には点群、メッシュ、テクスチャ、合成アライメント、およびキーフレーム編集などが含まれます。リンクをクリックすると詳細を確認できます。
¶ 8.3 AIオブジェクトセグメンテーションとトラッキング機能
¶ オブジェクトセグメンテーション
オブジェクトセグメンテーション:AIによる対象認識およびトラッキング技術を採用しています。対象物の領域を選択すると、システムはスキャン中にその領域を継続的にトラッキングし、無関係な環境点群を自動的に除去して、独立した対象物の点群データを出力します。詳細はRevo Scan 6ソフトウェアマニュアル - オブジェクトセグメンテーションをご覧ください。
¶ 背景除去
背景除去:AIによる背景認識およびフィルタリング技術を採用しています。除去したい背景領域を選択すると、システムはスキャン中にその領域を継続的に無視し、対象物の点群を自動的に保持します。詳細はRevo Scan 6ソフトウェアマニュアル - 背景除去をご覧ください。
¶ 8.4 3DGSリアルモデリング機能
3DGS:ガウシアンスプラッティングによる3D再構成技術を採用しています。システムは点群および RGB スキャンデータに基づいてガウスモデルを生成し、モデル表面のディテール表現を向上させます。この機能は、メッシュ化完了後に使用する必要があります。
¶ 8.5 ミラーリング
POP 4は、Revo Mirrorソフトウェアを使用してPCのスキャン画面をスマートフォンにワイヤレスでミラーリングし、操作することにも対応しています。
① Revopoint公式サイトの「サポート」>「ダウンロード」にアクセスし、Revo MirrorのPC版とモバイル版をダウンロードしてインストールします。
② バッテリーグリップをスキャナーに取り付けて固定し、パワーケーブルでバッテリーグリップとスキャナーを接続して給電します。
③ PCとスマートフォンの両方を「POP 4 - REVO - XXXXXXXX」という名前のネットワークに接続し、PCでRevo Scan 6を起動します。スキャナーが正常に接続されてスキャン画面に入るまで待ち、ミラーリングボタンをクリックします。
④ モバイル版Revo Mirrorで検出されたミラーリング対象デバイスをタップします。
⑤ 案内に従ってPC側でPINコードを入力し、初回ペアリングを完了します。「ミラーリングモードに入る」をクリックすると、スマートフォンからスキャンを操作できます。
ソフトウェアおよび画面ミラーリングの詳しい操作については、こちらの『Revo Mirror ユーザーマニュアル』をご参照ください。