¶ 1.本マニュアルについて
Revopoint 計測ソフトウェア ユーザーマニュアルへようこそ! 本マニュアルは Revo Scan 6 ソフトウェアの操作ガイドおよび説明を提供します。ナビゲーションバーのいずれかの見出しをクリックすると、対応する章へ素早く移動できます。
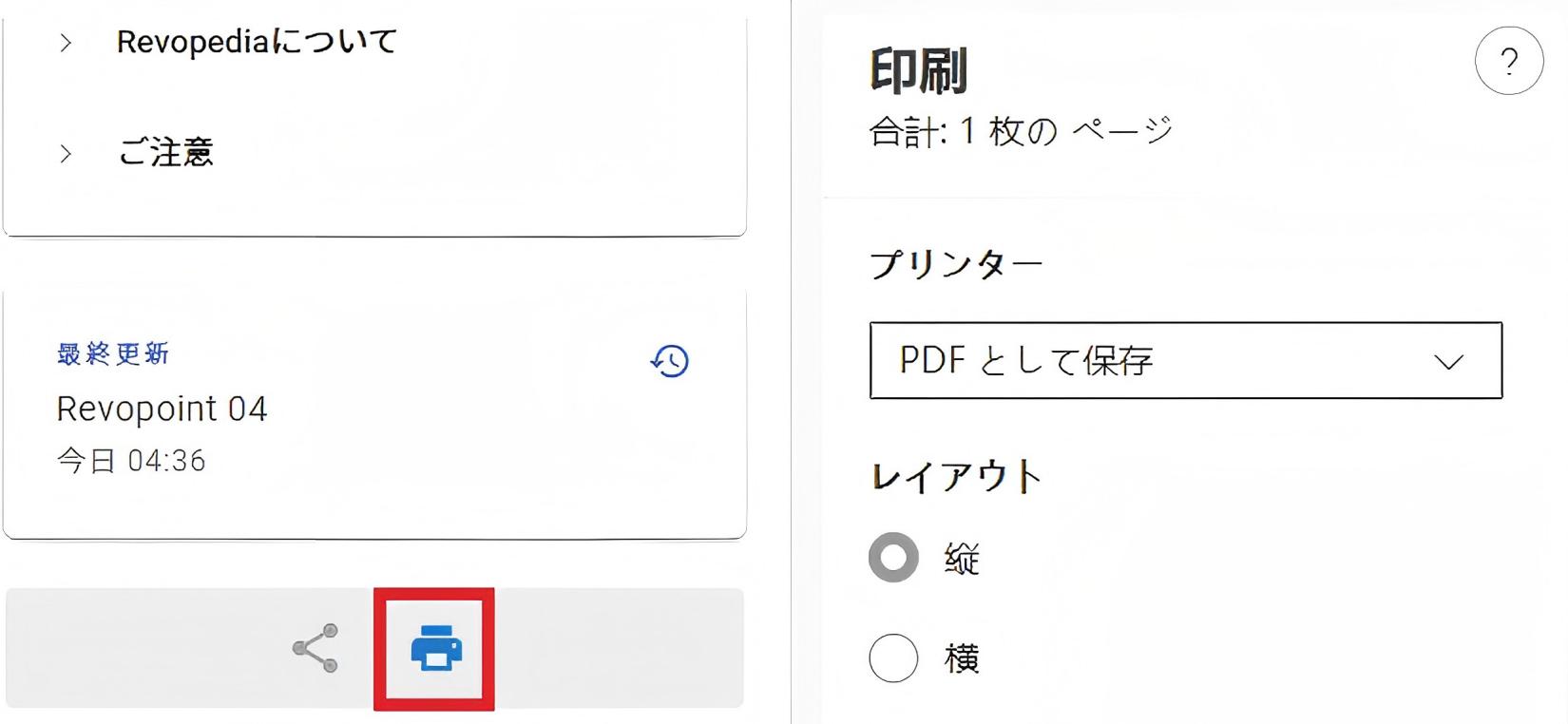
マニュアルのダウンロード:関連ソフトのマニュアル電子版が必要な場合は、マニュアル左側の章ナビゲーション下部にある印刷形式ボタンをクリックし、プリンターに「PDF に保存」を選んで保存してください。これで本マニュアルの PDF 版をダウンロードできます。
ご注意:ソフトウェアは継続的にアップデートされます。本マニュアルの内容および操作手順は参考用です。実際の画面表示を優先してください。
¶ 対応スキャナー機種
| INSPIRE シリーズ | INSPIRE |
| MINI シリーズ | MINI 2 |
| RANGE シリーズ | RANGE 2 |
| POP シリーズ | POP 3、POP 3 Plus、POP 4 |
| MIRACO シリーズ | MIRACO、MIRACO Pro、MIRACO Plus |
¶ ご使用前の注意事項
- 本マニュアルは Windows および Mac 版ユーザー向けです。モバイル版ユーザーは、iOS または Android 版 Revo Scan 6 で該当するソフトウェアユーザーガイドをご確認ください。
- 初めての方は、本マニュアルを閲覧する前に、末尾の用語集をご確認いただくことをおすすめします。
- 最適なスキャン体験を提供するため、本ソフトウェアは継続的に更新されます。ご使用中は、定期的にRevopoint公式サイトから最新バージョンをダウンロードしてください。
- アップデートによりUIが変更される場合があります。可能な限り本マニュアルも適時更新しますが、記載に不備が生じることがあります。ご意見・ご提案をお寄せいただけますと幸いです。
¶ 2. ソフトウェアのインストールと更新
¶ 2.1 Revo Scan 6 の主な変更点(Revo Scan 5 比)
1)「ファイル管理」画面を追加:ファイルのグループ化に対応し、スキャンデータをより効率よく整理・管理できるようになりました。
2)ファイル構成を簡素化:新しい「1回のスキャン=1ファイル」構成を採用。RS5の複雑な「プロジェクト」概念を見直し、ファイル管理をより直感的で分かりやすいものにしました。
3)後処理ワークフローを再設計:
① 点群融合/メッシュ生成の保存方式を強化:1つのファイル内で、点群融合・メッシュ生成の結果を最大5回分保存できます。結果の上書きを防ぎ、バージョンを残したまま比較・試行錯誤が可能です。
② 後処理操作を簡略化:編集のクイック操作を導入。アイコンをクリックするとプリセット(既定)パラメータでワンクリック実行でき、またドロップダウンからパラメータをカスタマイズして実行することも可能です。処理効率と操作性が大幅に向上しました。
4)UIデザインを変更:メインカラーをブラック×レッドからブラック×ブルーへ変更し、落ち着いて作業に集中できるデザインに刷新しました。
5)ビュー関連機能の配置を最適化:3D視点、モデル表示、補助ツールなどの設定をメイン操作エリアに集約し、必要な機能へ素早くアクセスできるようにしました。
¶ 2.2 システム要件
| 対応OS | 最小要件 | 推奨要件 |
 |
RAM:≥ 16GB CPU:Intel i7 第13世代または AMD Ryzen 7 5800 GPU(オプション):NVIDIA GeForce RTX3060(8GB) |
メモリ:≥ 32 GB CPU:Intel i9 第12世代以降 GPU(オプション):NVIDIA RTX 4060 (8 GB) 以上 |
 |
macOS システム要件:macOS 11.0以降 CPU:M1 Pro/Max/Ultra メモリ ≥ 16 GB |
macOS システム要件:macOS 11.0以降 CPU:M3 Pro/Max/Ultra以上 メモリ ≥ 24 GB |
¶ 2.3 ソフトウェアのダウンロード
Revopoint 公式サイトの サポート - ダウンロードページ から Revo Scan 6をダウンロードしてください。
- Windows
ダウンロードした Revo Scan 6 ソフトウェアのインストーラーパッケージをダブルクリックし、インストールウィザードに従ってインストールを完了してください。完了後、Revo Scan 6 アイコンをダブルクリックしてソフトウェアを起動します。
- macOS
MacのFinderでダウンロード済みの Revo Scan 6 インストールファイルを見つけ、そのファイルを右クリックして「このアプリケーションで開く」を選択し、その後「インストーラ」をクリックしてください。インストールウィザードに従ってインストールを完了してください。完了後、デスクトップまたはアプリケーションフォルダ内の Revo Scan 6 アイコンをダブルクリックすると、ソフトウェアを起動できます。
注:Mac では App Store 以外のアプリケーションのインストールを許可する必要がある場合があります。Appleメニュー > システム設定を開き、サイドバーで「プライバシーとセキュリティ」をクリックし、右側の「セキュリティ」を探してください(下にスクロールが必要な場合があります)。セキュリティ設定を「App Storeと確認済みの開発元」に変更すると、正常にインストールできます。ソフトウェアのバージョンは継続的に更新されるため、最新バージョンは公式サイトの表示をご確認ください。
¶ 2.4 ソフトウェア更新について
ソフトウェア更新情報および更新内容の詳細については、Revopoint公式サイトのPC更新履歴をご確認ください。

¶ 3.スキャナー接続
本章の接続図は参考です。実際の接続方法に従ってください。
¶ 3.1 USB接続
MIRACO はオールインワン型スキャナーのため、外部機器なしで使用できます。通常は製品を手持ちでスキャンすることを推奨します。
より繊細なスキャン設定と後処理が必要な場合は、MIRACO を Revo Scan 6(PC)に接続してスキャンすることもできます。接続手順は以下のとおりです。
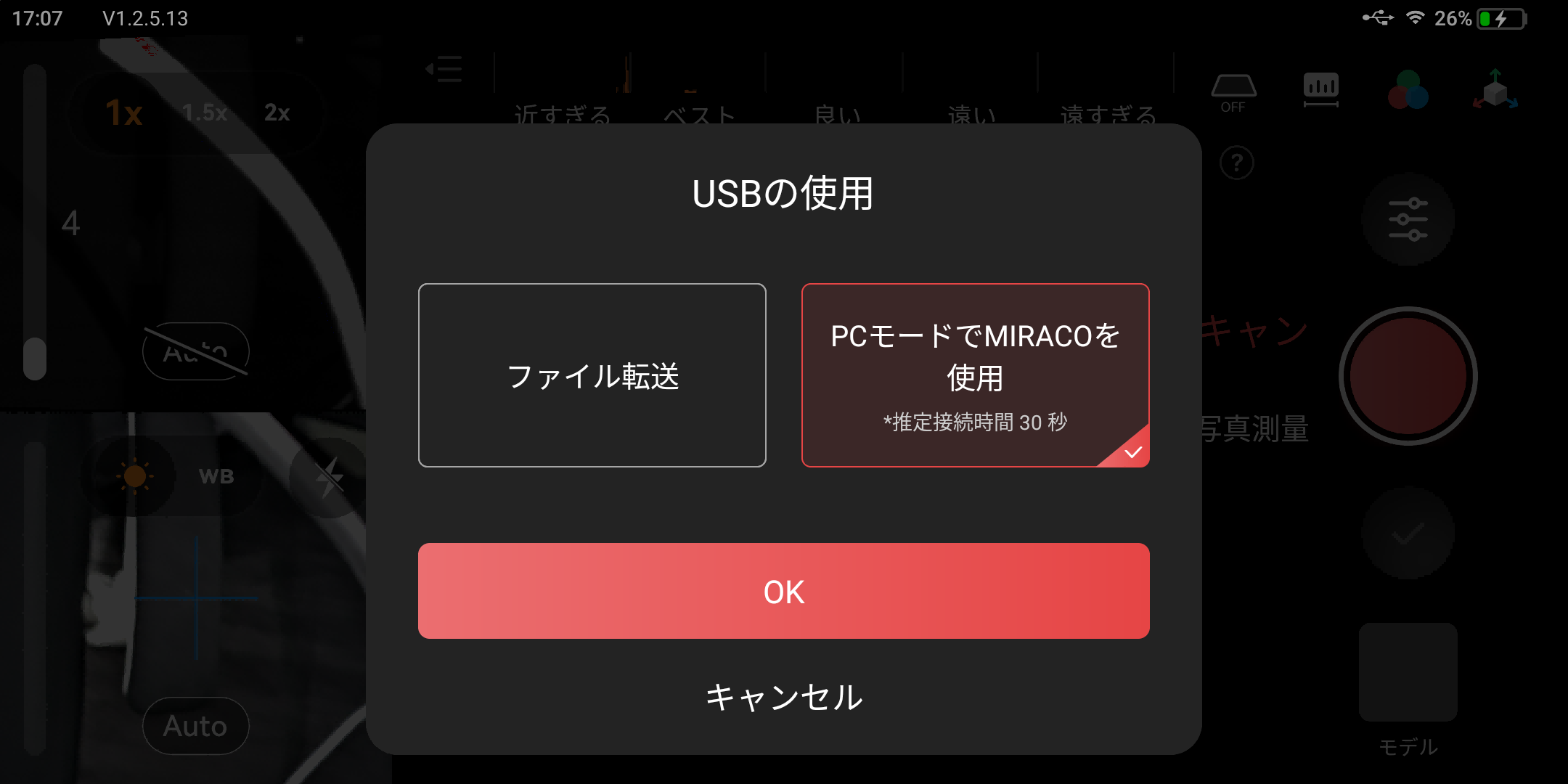
手順 1:付属の MIRACO USB Type‑C ケーブルでPCに接続し、PC版 Revo Scan 6 を起動します。MIRACO にポップアップが表示されたら、「PCモードでMIRACOを使用」を選択してください。
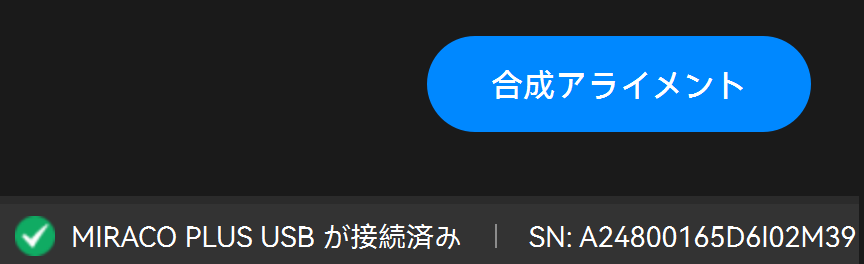
手順 2:スキャナー接続ステータスバーに「スキャナー接続済み」と表示されたら、接続完了です。
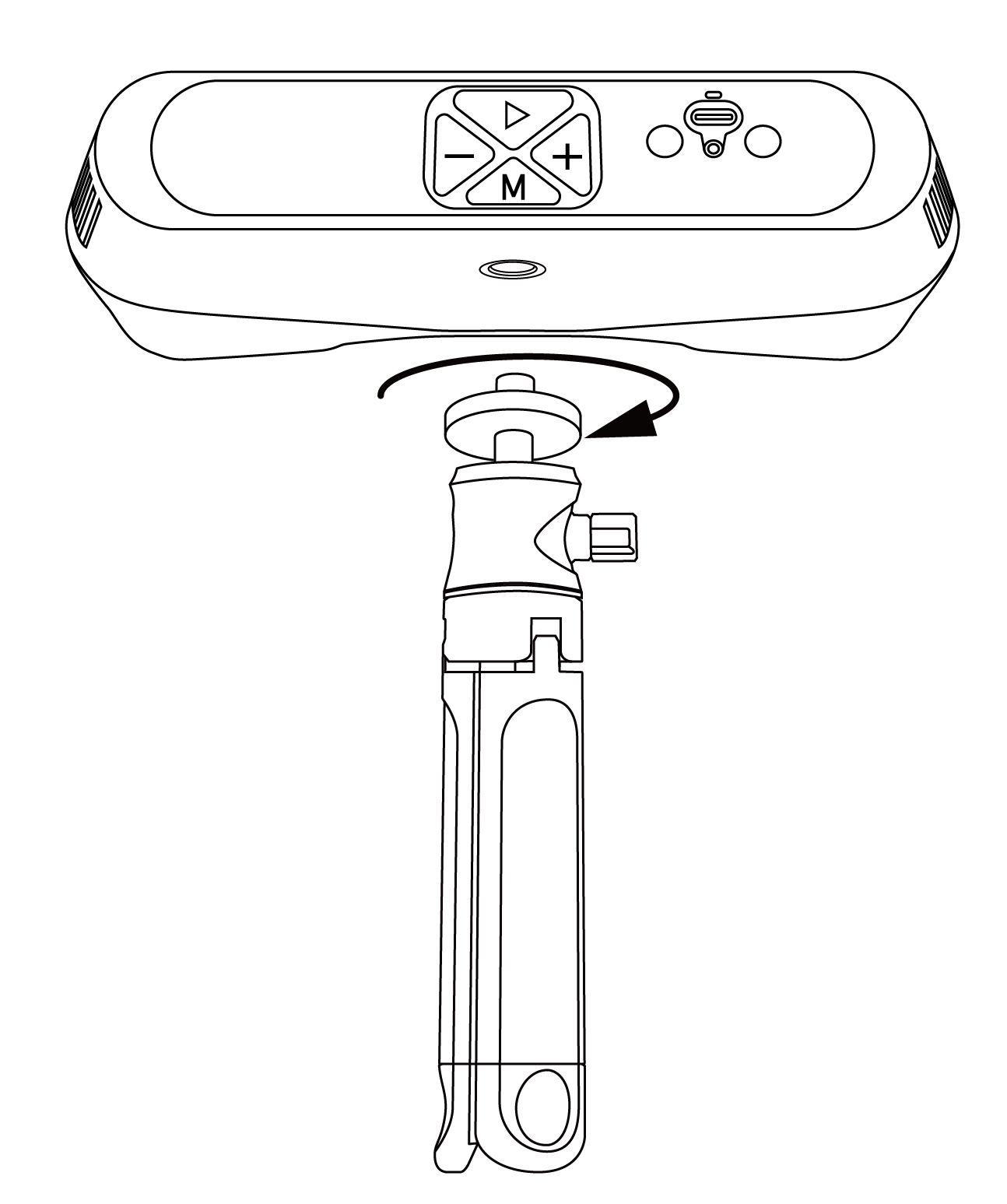
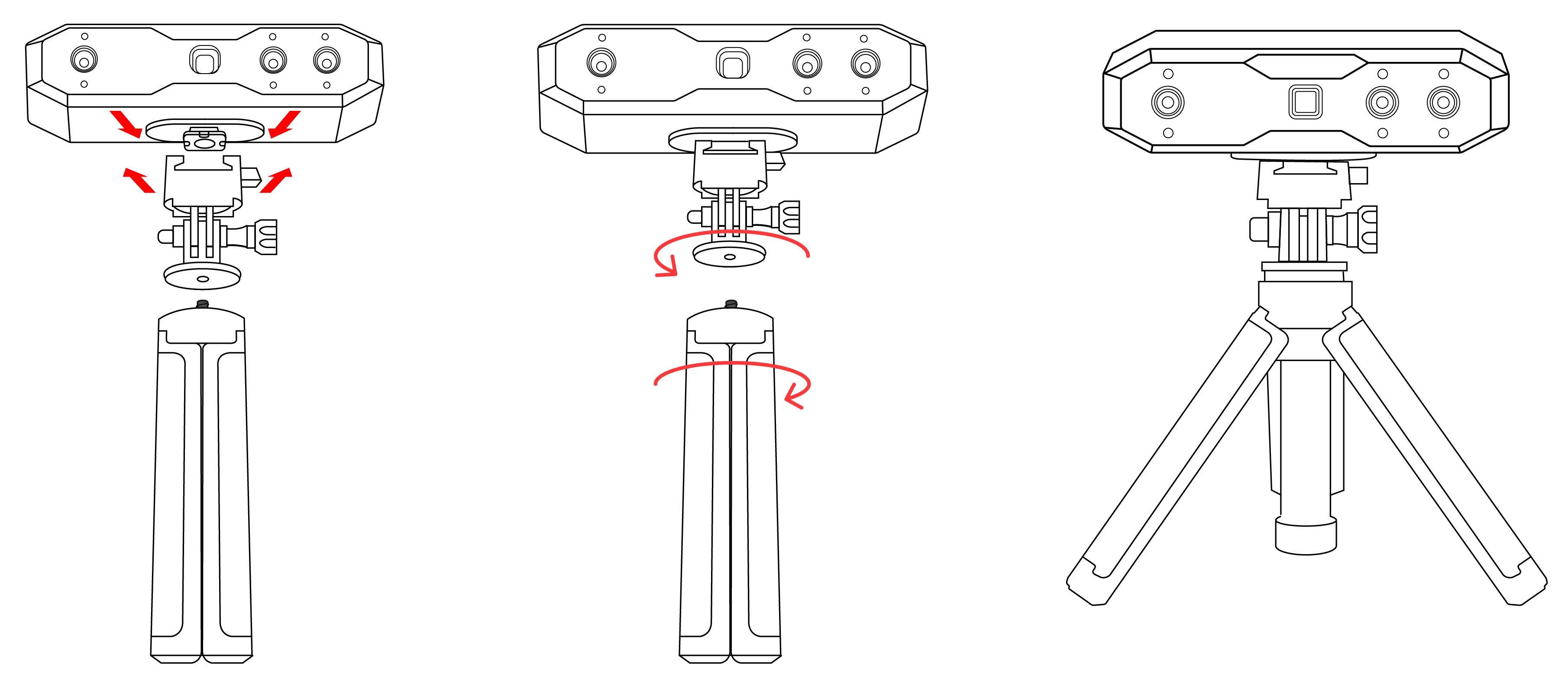
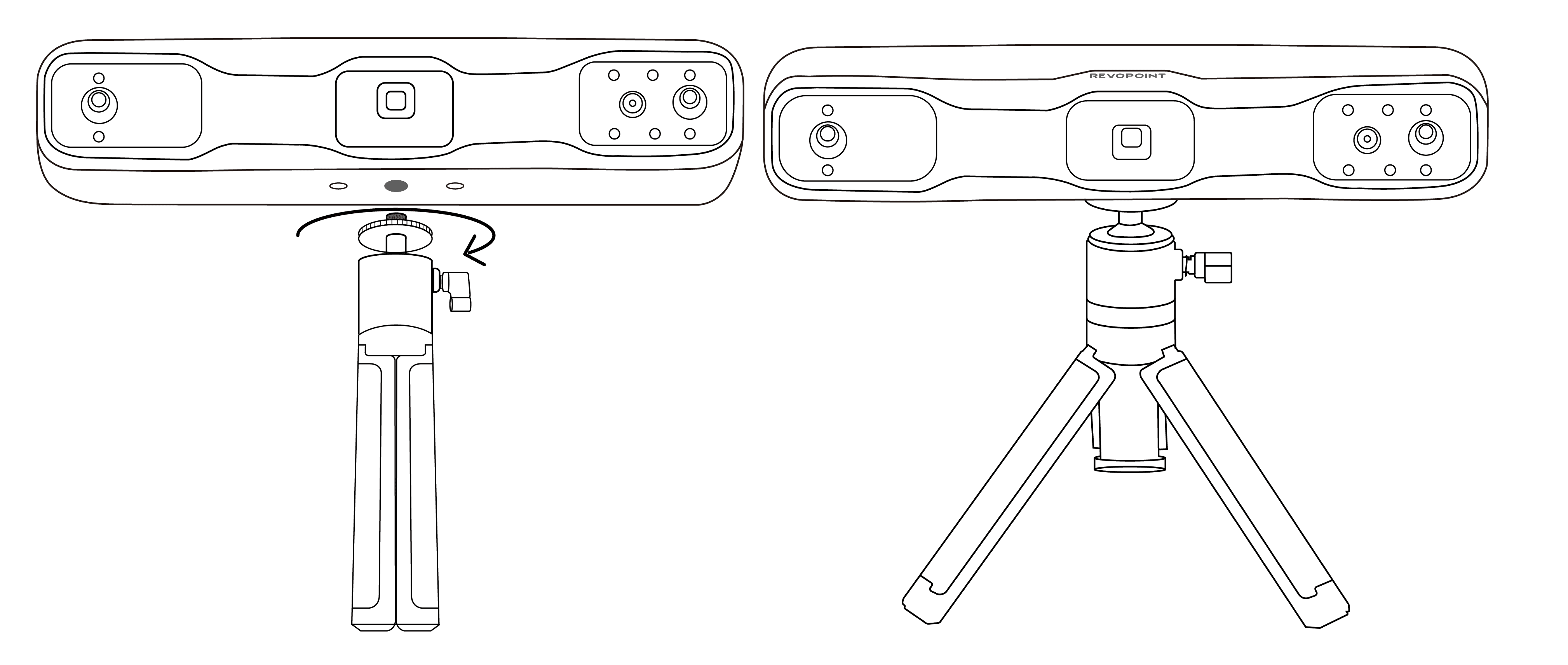
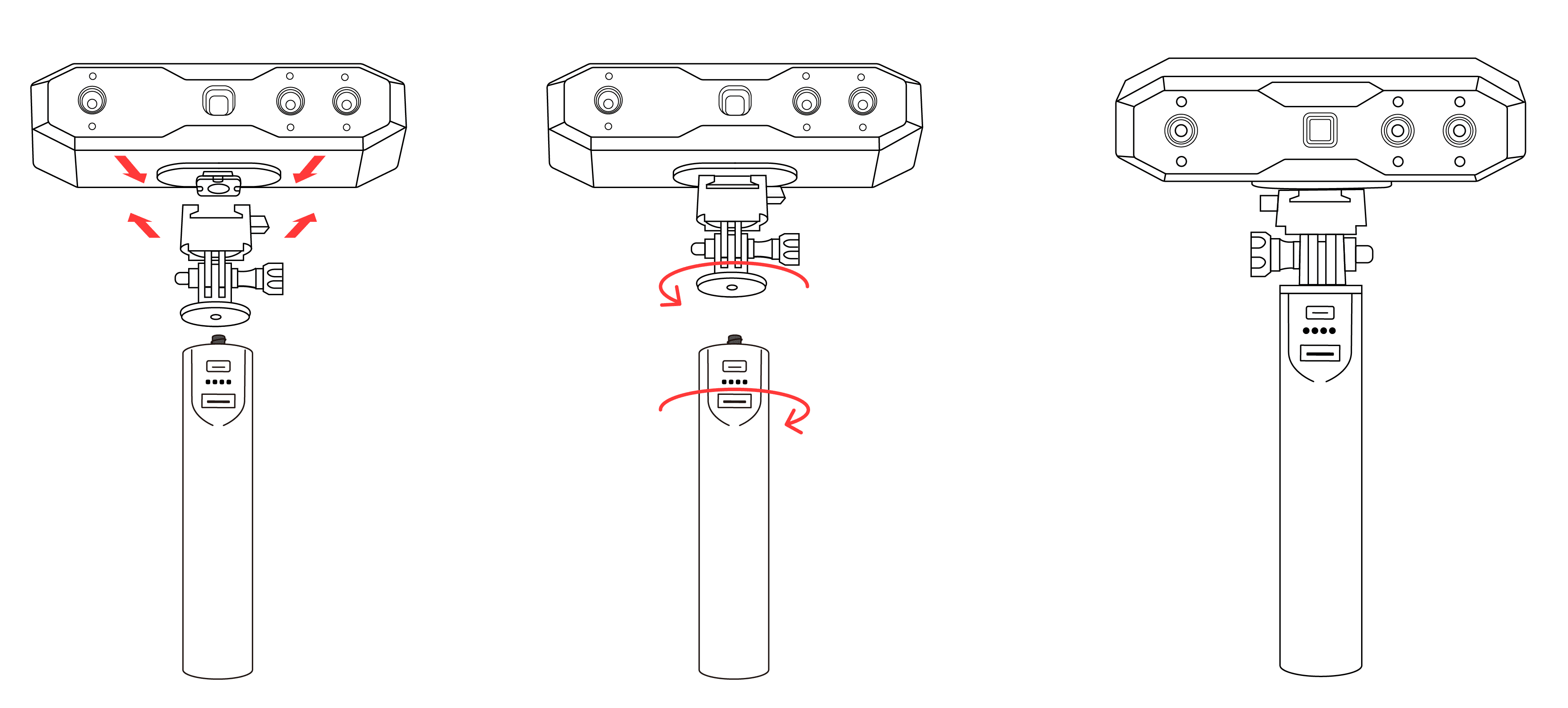
手順1:三脚をPOP 4に取り付けます。
ご注意:三脚の高さを調整するとき、不安定さを避けるため、各脚を均等に伸ばしてロック位置で固定してください。
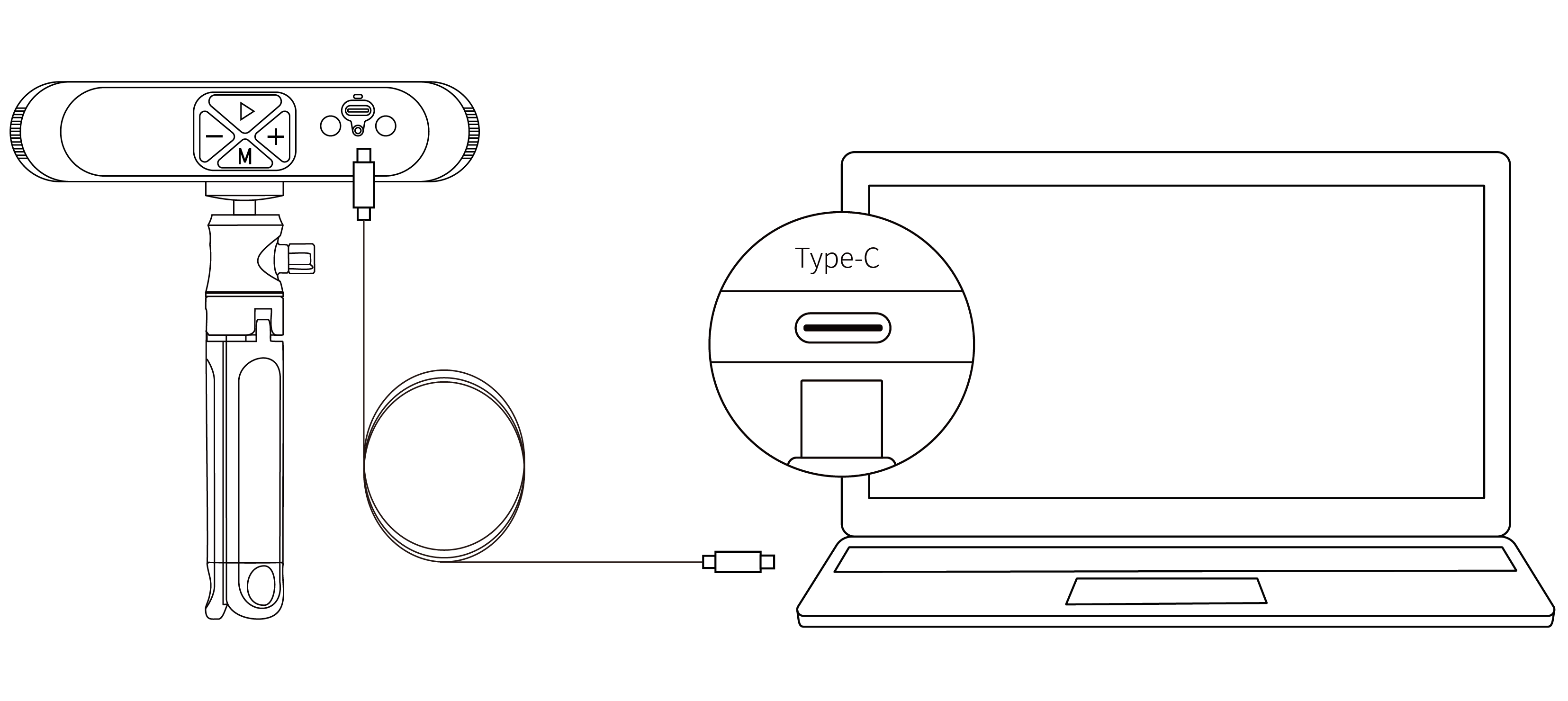
手順2:USB Type-C to Type-Cケーブルを使用してスキャナーをPCに接続します。電源が入ると、スキャナー背面のインジケーターが緑色に点灯します。
注:POP 3 Plusは付属のUSB Type-A to Type-Cデータケーブルを使用する必要があります。スキャナーとPCを接続する際は、USB 3.0以上のポートを使用してください。
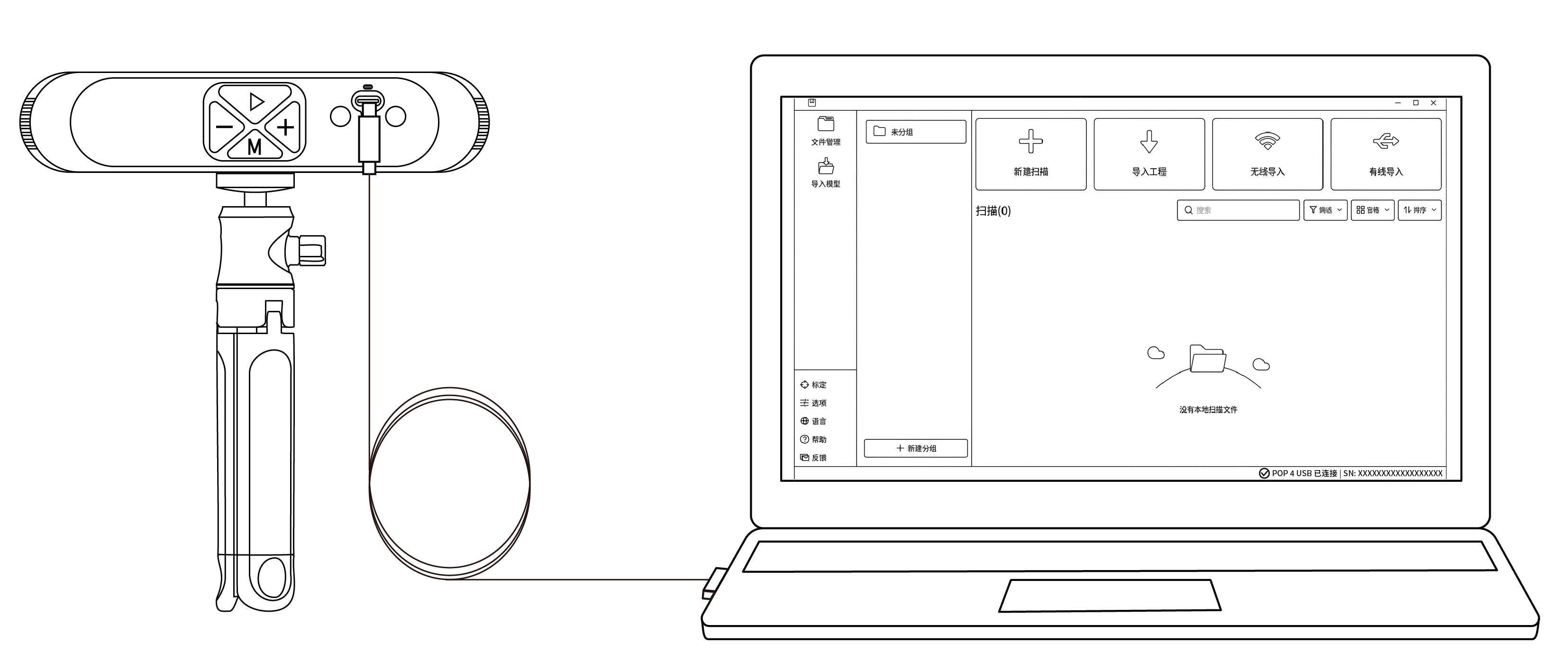
手順3:Revo Scan 6ソフトウェアを起動し、画面右下にスキャナーが接続済みと表示されたら、スキャンを開始できます。
手順1:スキャナー、クイックリリース部品、三脚を組み立てます。
手順2:USB Type‑A to Type‑C ケーブルでスキャナーとPCを接続し、インジケーター②が緑の常時点灯に変わるまで待ちます。点灯したら給電完了です。
ご注意:PCにType‑A ポートがない場合は、USB Type‑C to Type‑A アダプターをご使用ください。
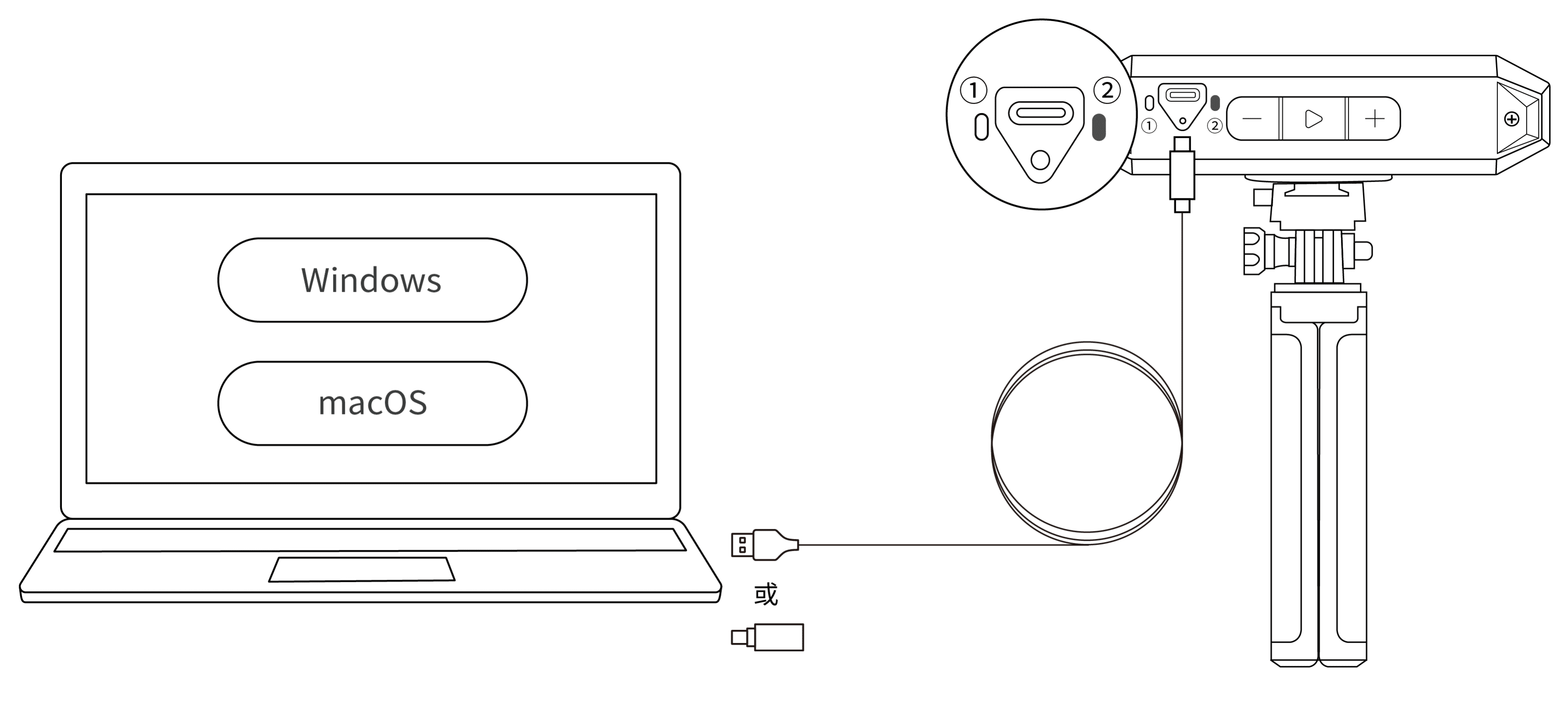
手順3:Revo Scan 6 ソフトウェアを起動し、画面に「スキャナー接続済み」と表示され、インジケーター①が青の常時点灯になったら、スキャンを開始できます。
手順1:スキャナーと三脚を組み立てます。
手順2:USB Type‑A to Type‑C ケーブルでスキャナーとPCを接続します。インジケーター②が緑の常時点灯に変わったら、給電完了です。
ご注意 : PCにType‑Aポートがない場合は、USB Type‑C to Type‑A アダプターをご使用ください。
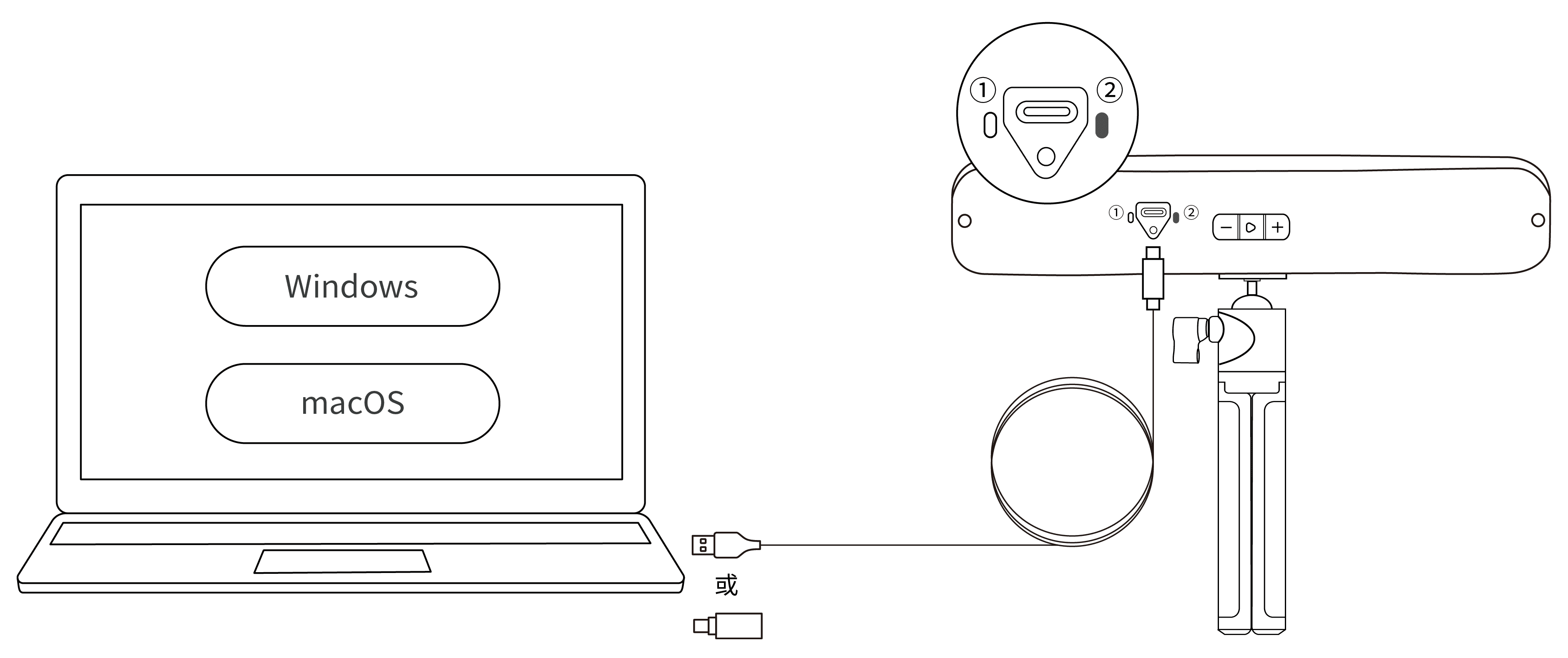
手順3:Revo Scan 6 ソフトウェアを起動し、画面に「スキャナー接続済み」と表示され、インジケーター①が青の常時点灯になったら、スキャンを開始できます。
¶ 3.2 Wi‑Fi接続
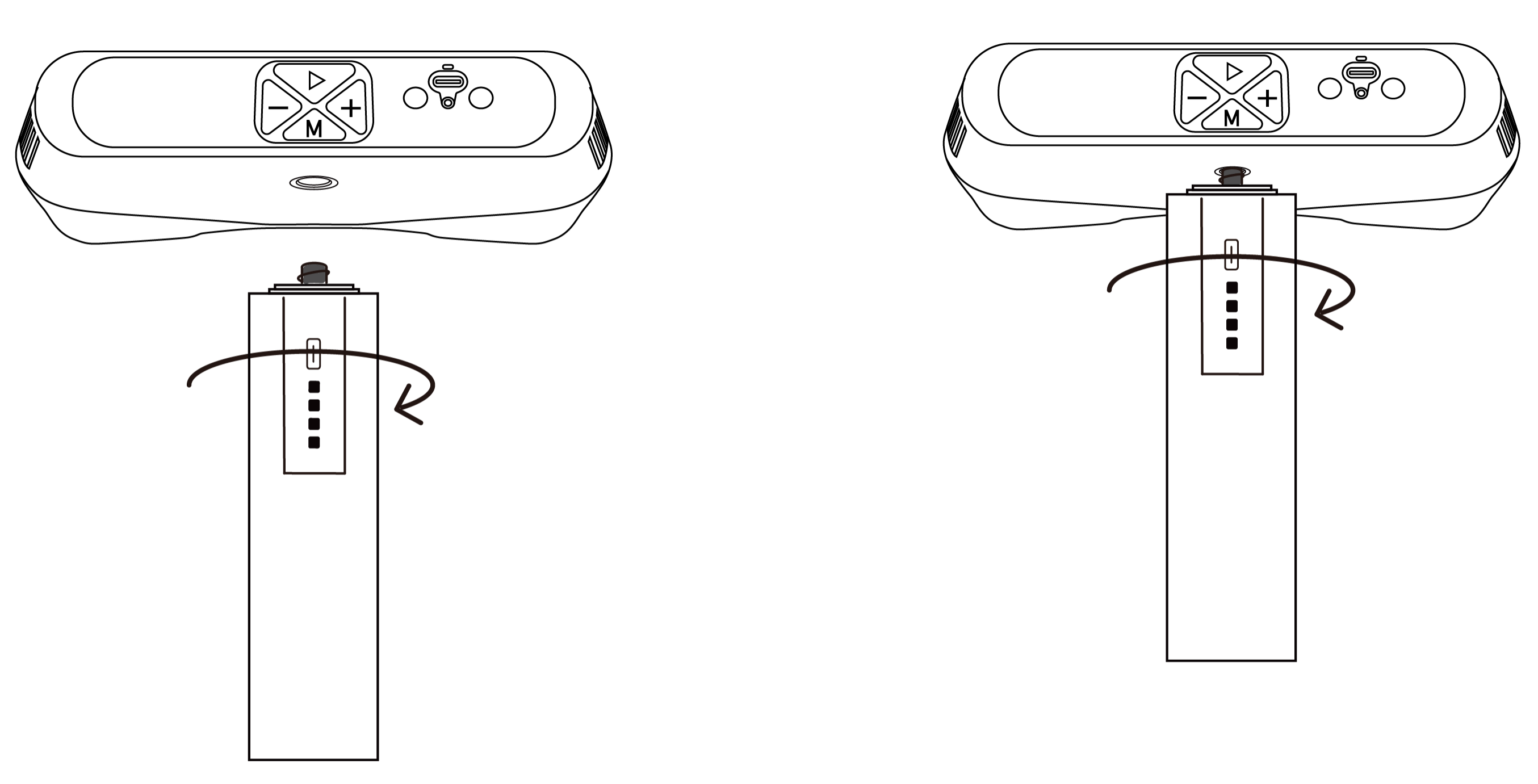
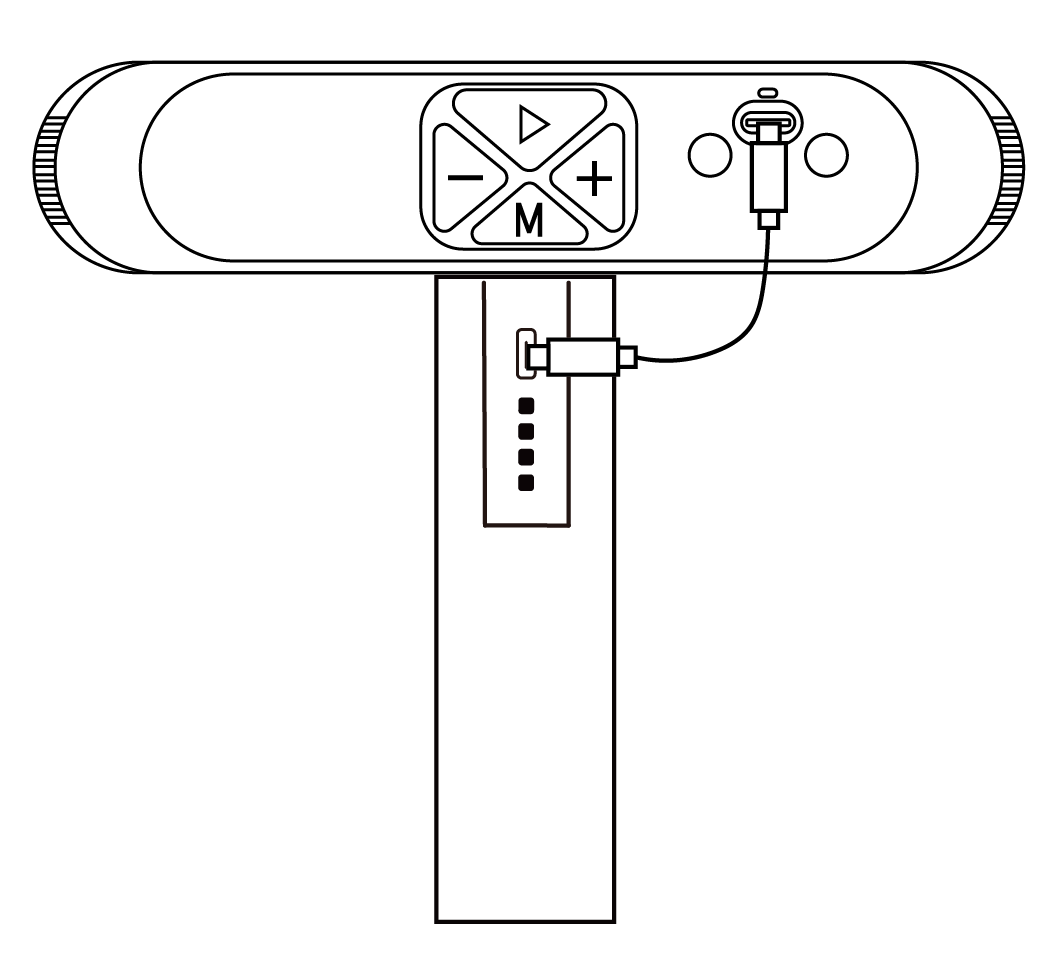
手順1:スキャナーとバッテリーグリップを組み立てます。
手順2:パワーケーブルを使用して、スキャナーとバッテリーグリップを接続します。電源が入ると、スキャナーのインジケーターが緑色に点灯します。
ご注意:スキャナーをPCで給電すると、USB モードに自動的に切り替わってしまいます。
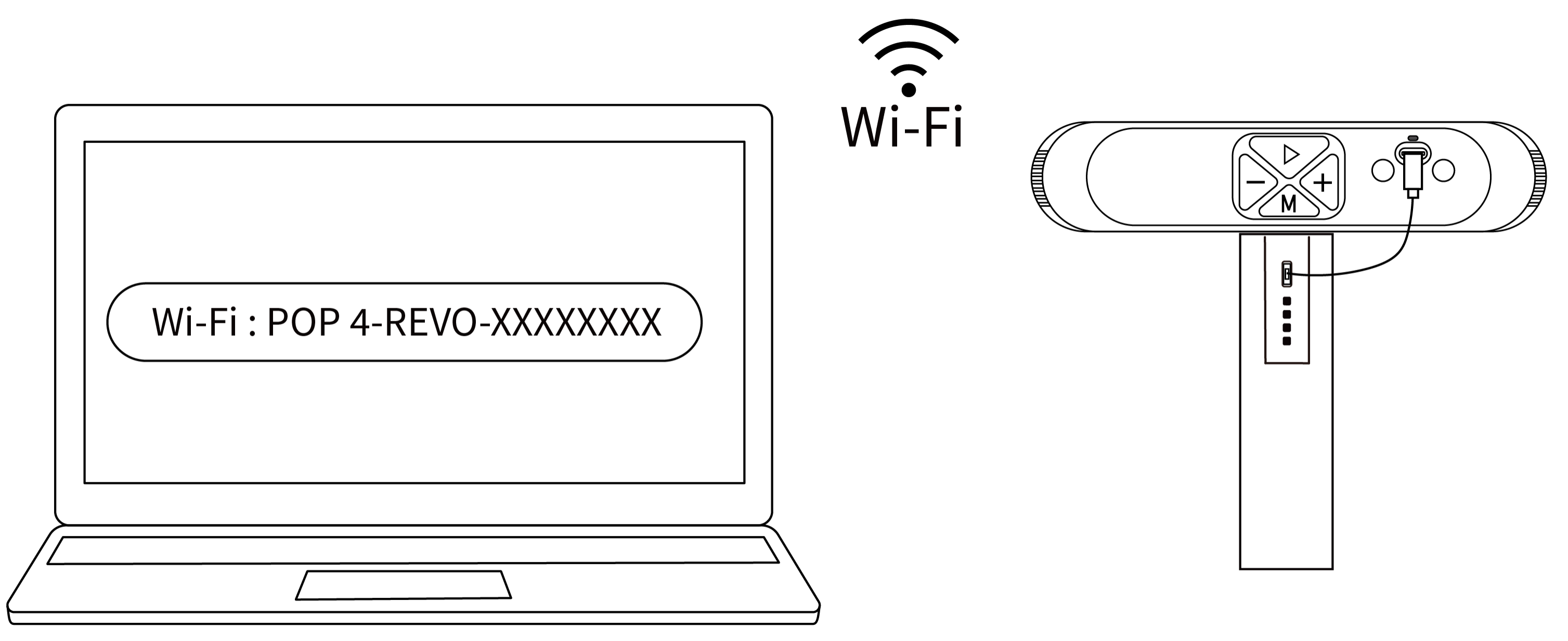
手順3:PCのWi-Fi設定で「POP 4-REVO-XXXXXXXX」というネットワークを検索し、接続します(パスワード不要)。
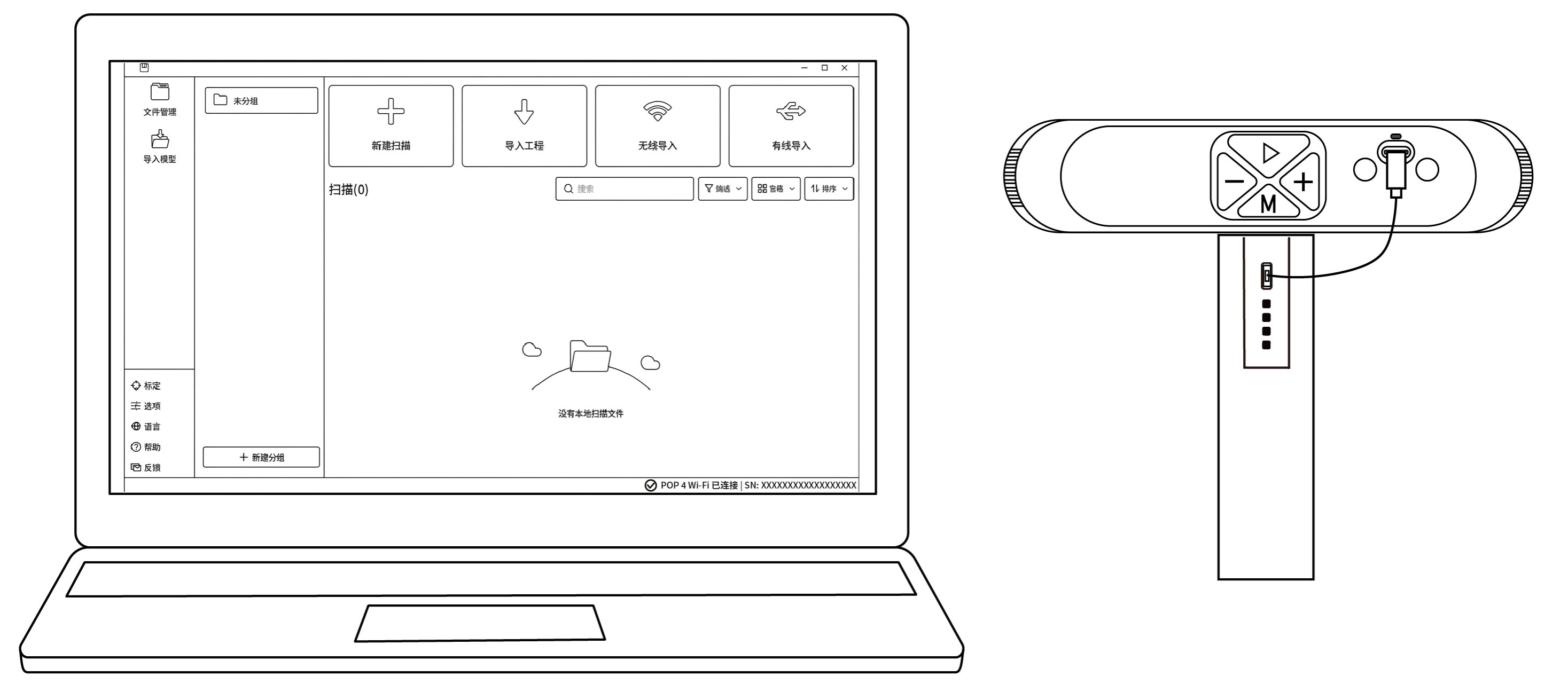
手順4:Revo Scan 6ソフトウェアを起動し、画面右下にスキャナーが接続済みと表示されたら、スキャンを開始できます。
手順1:スキャナー、クイックリリース部品、モバイルバッテリーを組み立てます。
ご注意: モバイルバッテリーは Revopoint 公式ストアで購入できます。
手順2:USB Type‑A to Type‑C ケーブルでスキャナーとモバイルバッテリーを接続し、インジケーター②が緑の常時点灯に変わったら、給電完了です。
ご注意 : PCにType‑Aポートがない場合は、USB Type‑C to Type‑A アダプターをご使用ください。
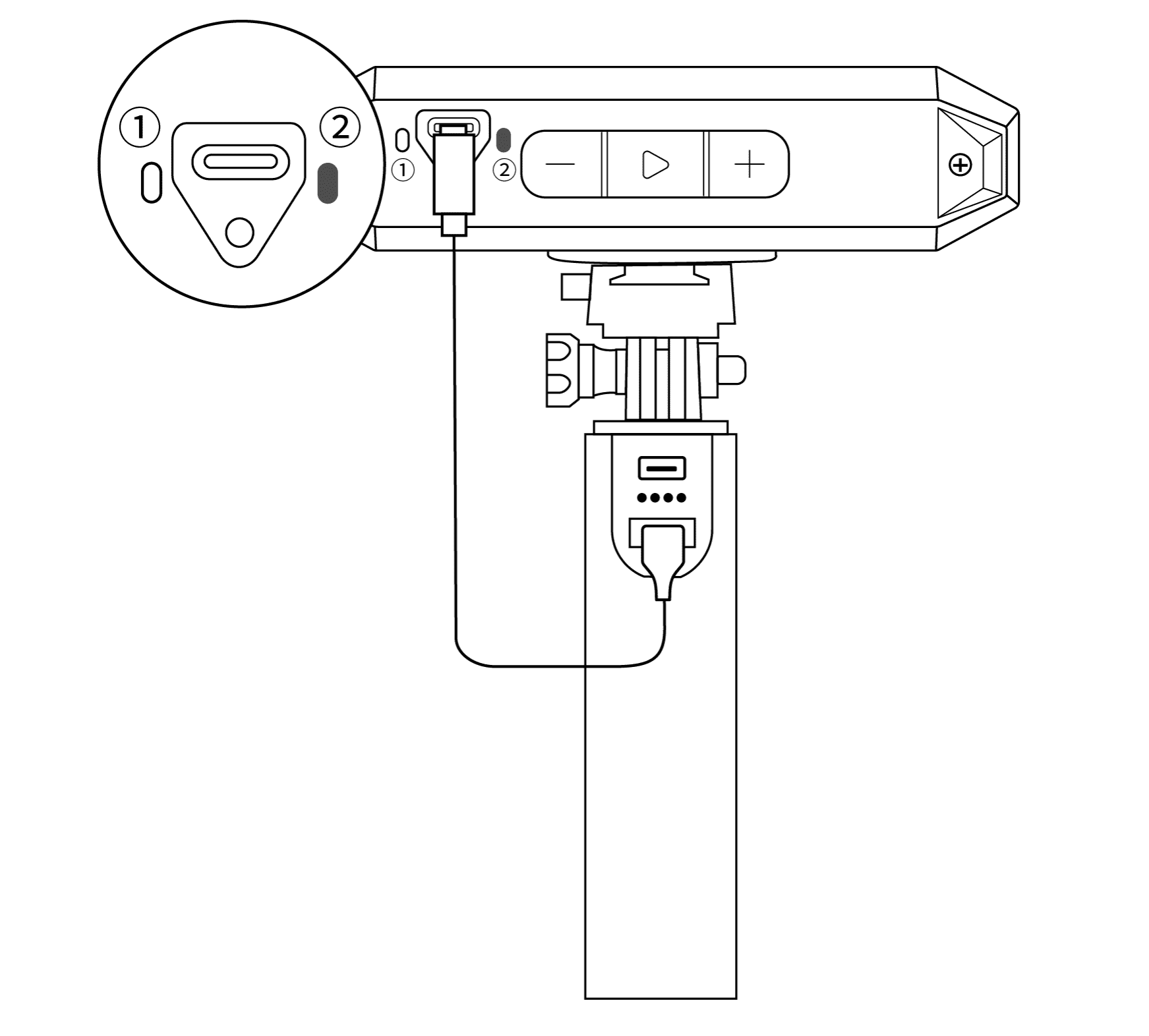
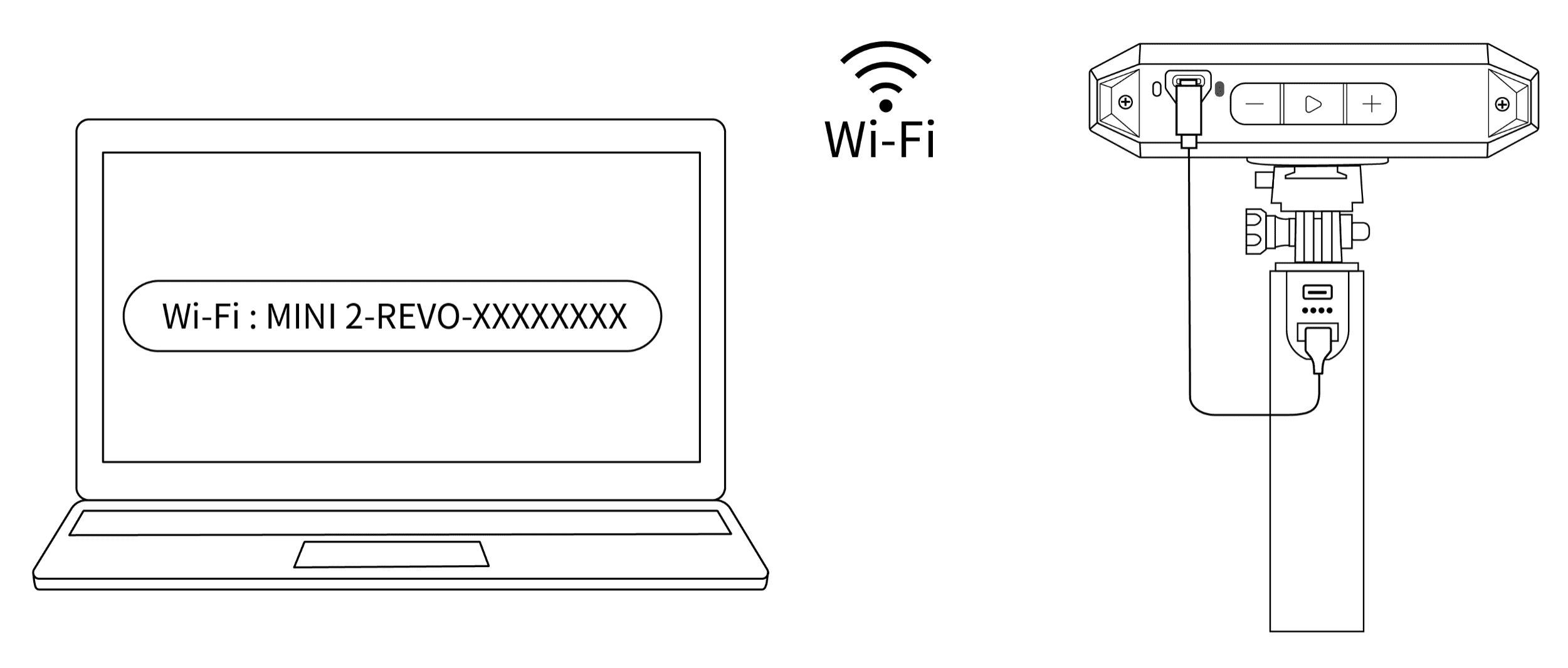
手順3:PCのWi‑Fi一覧で「MINI 2-REVO-XXXXXXXX」というネットワークを見つけて接続します(パスワード不要)。
手順4:Revo Scan 6 ソフトウェアを起動し、画面に「スキャナー接続済み」と表示され、インジケーター①が青の常時点灯になったら、スキャンを開始できます。
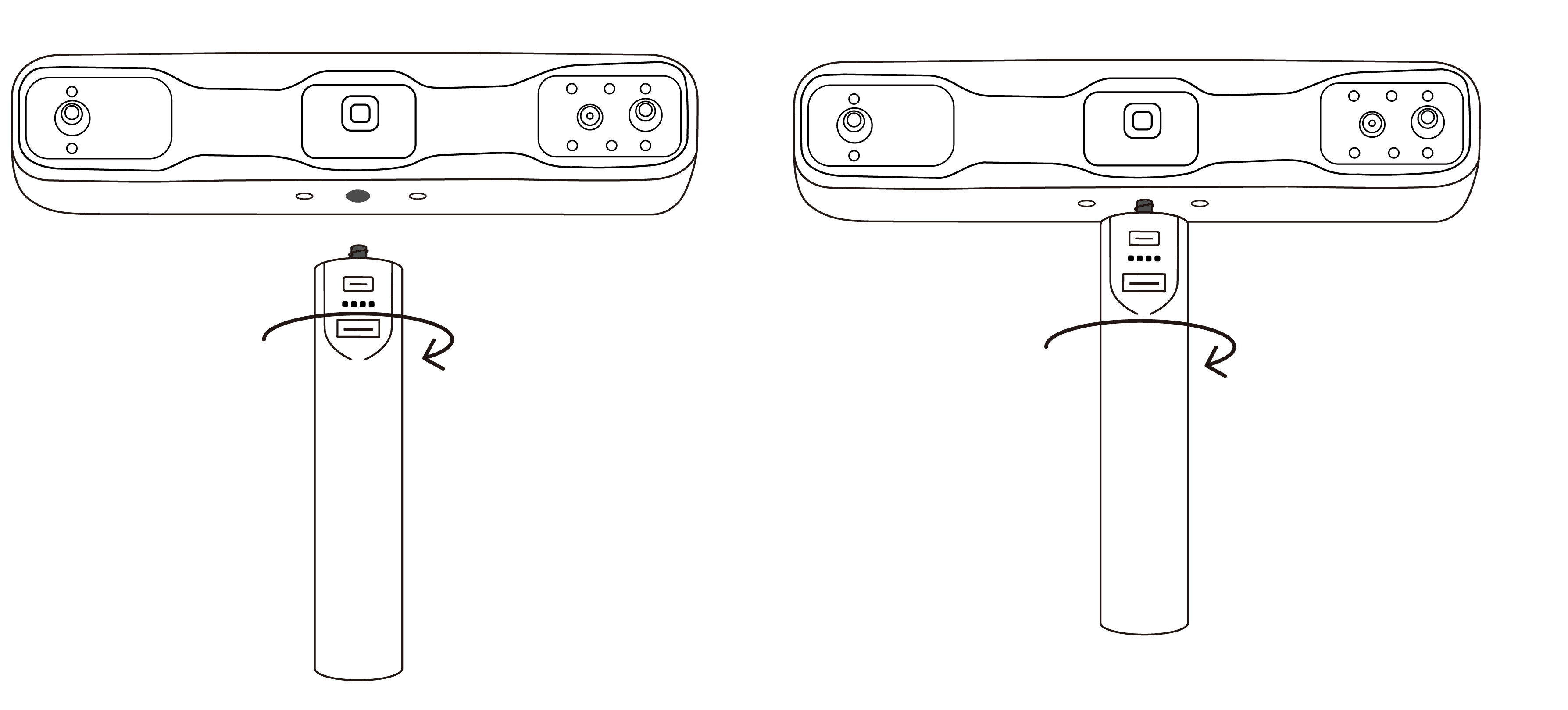
手順1:スキャナーと充電グリップを組み立てます。
手順2:USB Type‑A to Type‑C ケーブルでスキャナーと充電グリップを接続します。インジケーター②が緑の常時点灯に変わったら、給電完了です。
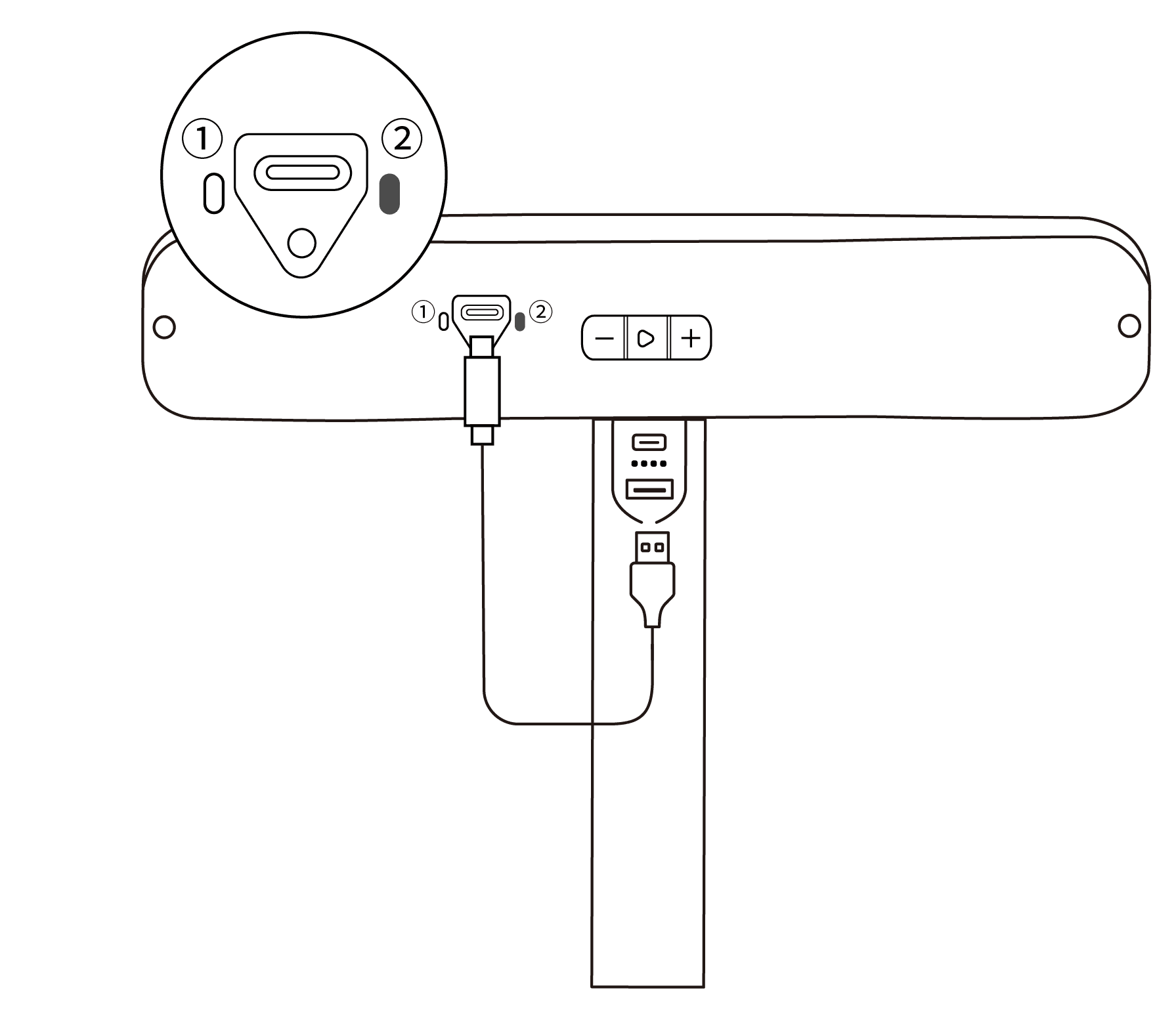
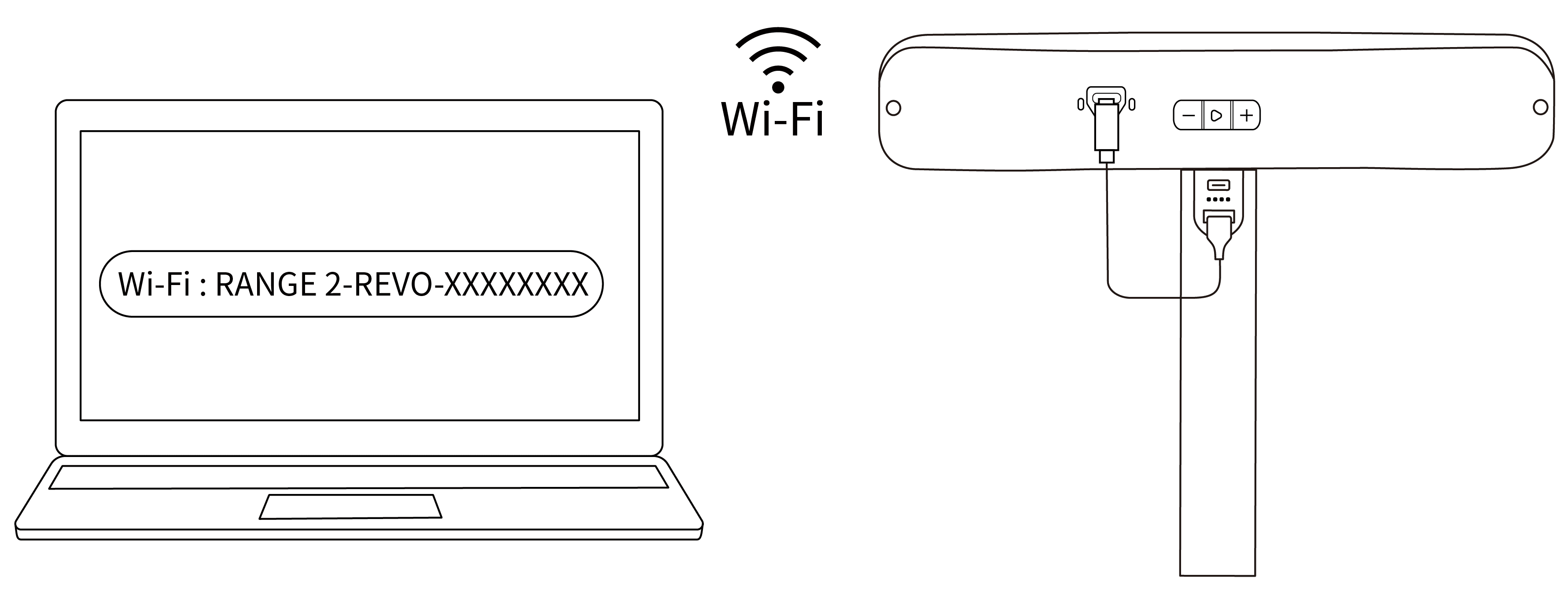
手順3:PCのWi‑Fi一覧で「RANGE 2-REVO-XXXXXXXX」というネットワークを見つけて接続します(パスワード不要)。
手順4:Revo Scan 6 ソフトウェアを起動し、画面に「スキャナー接続済み」と表示され、インジケーター①が青の常時点灯になったら、スキャンを開始できます。
¶ 3.3 接続トラブルシューティング
POP 3 / POP 3 Plus / MINI 2 / RANGE 2
¶ 4. スキャン設定
¶ 4.1 トラッキング方式
ファイル管理画面で「新規スキャン」をクリックし、ニーズに応じて適切なトラッキングモードを選択してください。
|
接続画面(非POP 4) |

POP 4接続画面 |
¶ 4.1.1 トラキングモード
ファイル管理ページの「新規スキャン」をクリックし、要件に応じて対応するトラキングモードを選択します。
• 特徴:表面に明確な幾何学的特徴がある対象に適しています(例:彫像や人体)。
• マーカー:大きな平面があり、幾何学的特徴が少ない対象(立方体や円柱などの対称形状)に適しています。
• 全域マーカー:幾何学的特徴が目立たない大型の対象に適しています。本モードでは2段階で操作します。まずマーカーをスキャンして全域マーカーファイルを作成し、そのファイルに基づいて点群をスキャンします。
• カラー(POP 4のみ対応):表面に明確な模様などのカラーテクスチャのディテールがある対象物に適しています。画像のテクスチャ特徴によってアライメントを行うため、表面のテクスチャディテールが豊富な対象物に適しています。
注: カラートラッキングで小さな対象物(≲12 cm × 6 cm)をスキャンする場合は、ターンテーブルスキャンでもハンドヘルドスキャンでも、対象物の周囲にテクスチャ特徴のある補助物を配置し、少なくとも 1.5 周囲を回るようにスキャンすることを推奨します。これにより、トラッキングの安定性と精度を向上できます。
¶ 4.1.2 スキャンモード(POP 4のみ対応)
• フルフィールドHDスキャン:フルフィールドに高精細な構造化光パターンを投影します。幾何特徴のある対象物ではマーカー不要の自由トラッキングに適しており、特徴のない対象物ではマーカートラッキングに対応します。高精細な点群モデリングに適しています。
• VCSEL高速スキャン:高密度のドットマトリクスパターンを投影し、特徴トラッキングモードでマーカー不要の高速スキャンを実現します。データ取得がよりスムーズかつ高速になります。
ご注意: このモードで屋外の対象物をスキャンする場合は、屋外用ブルーライトフィルターを取り付けないでください。スキャン結果に影響するおそれがあります。
• ハイブリッドHDスキャン:2つのプロジェクターが連携して動作し、素早い動きの中でも高精度な点群を取得できます。対象物表面の高速かつ高品質なモデリングに適しています。
• ラインレーザースキャン:
① 30本クロスラインレーザースキャン:30本の交差する青色レーザーラインを投影し、マーカートラッキングモードで高反射の金属表面や黒色対象物のスキャンに優れた性能を発揮します。
② シングルライン深穴スキャン:高品質な単一の青色レーザーラインを投影し、マーカートラッキングモードで局所的な深穴や深溝など狭い部位の3Dデータを正確に取得します。
¶ 4.2 スキャンパラメータ設定
¶ 4.2.1 スキャン精度
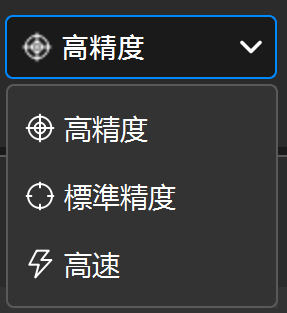
高精度:表面構造が複雑な対象のスキャンに適しています(標準精度に比べてスキャンはやや遅くなります)。
標準精度:高速スキャンモードで、表面構造が比較的単純な対象に適しています。
高速:フレームレートが高く、より滑らかなトラッキングが可能です。大型の対象物や人体を素早くスキャンする用途に適しています。
ご注意:スキャン精度の選択肢は、スキャナーの実際の機種(モデル)により異なります。
¶ 4.2.2 スキャン対象
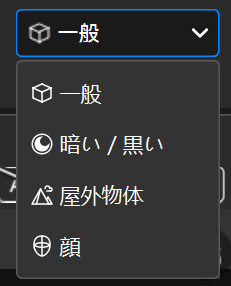
一般:日常の多くの対象(幾何学的特徴が明瞭なもの)に適しています。以下のいずれにも当てはまらない場合は本モードをご使用ください。
暗い/黒い:黒色や暗い表面の対象(例:黒/ダークグレーの衣類・靴など)に適しています。黒革などの一部の濃色素材や金属等の高反射面は光を吸収・反射するため、現像スプレー等で表面処理を行ってください。
屋外オブジェクト(POP 4のみ対応):屋外環境で対象物をスキャンする場合に使用します。
ご注意:屋外でスキャンする際は、直射日光を避け、反射による干渉を軽減してください。雨天や強風時のスキャンは避けてください。機器への浸水による故障や、対象物表面の湿り気によるデータ精度への影響を防ぐためです。
照明環境の要件:マルチラインレーザー<50,000 lux、VCSEL構造化光<100,000 lux (マルチラインレーザーモードで屋外フィルターを併用する場合は、100,000 lxの照明環境下でスキャンできます)。顔:人の顔のスキャンに適しています(MINI シリーズをご使用の場合は、プロジェクターを至近距離で長時間直視しないでください)。
人体: 人体のスキャンに使用します。
大型物体: 大きな対象物を比較的高速でスキャンする場合に使用します(高速スキャンモード時の一部スキャナーのみ対応)。
ご注意:対応する対象のタイプやサイズはスキャナーの機種によって異なります。
¶ 4.2.3 目標点間距離
ラインレーザーモードでスキャンする際は、目標点間距離を手動で調整できます。目標点間距離とは、スキャン中の隣接する点群間の距離を指します。設定した点間距離が小さいほど、スキャン時間は長くなります。
ご注意:デフォルトの点間距離パラメーターを使用することを推奨します。スキャンモードを切り替えても、目標点間距離はデフォルトで変更されません。
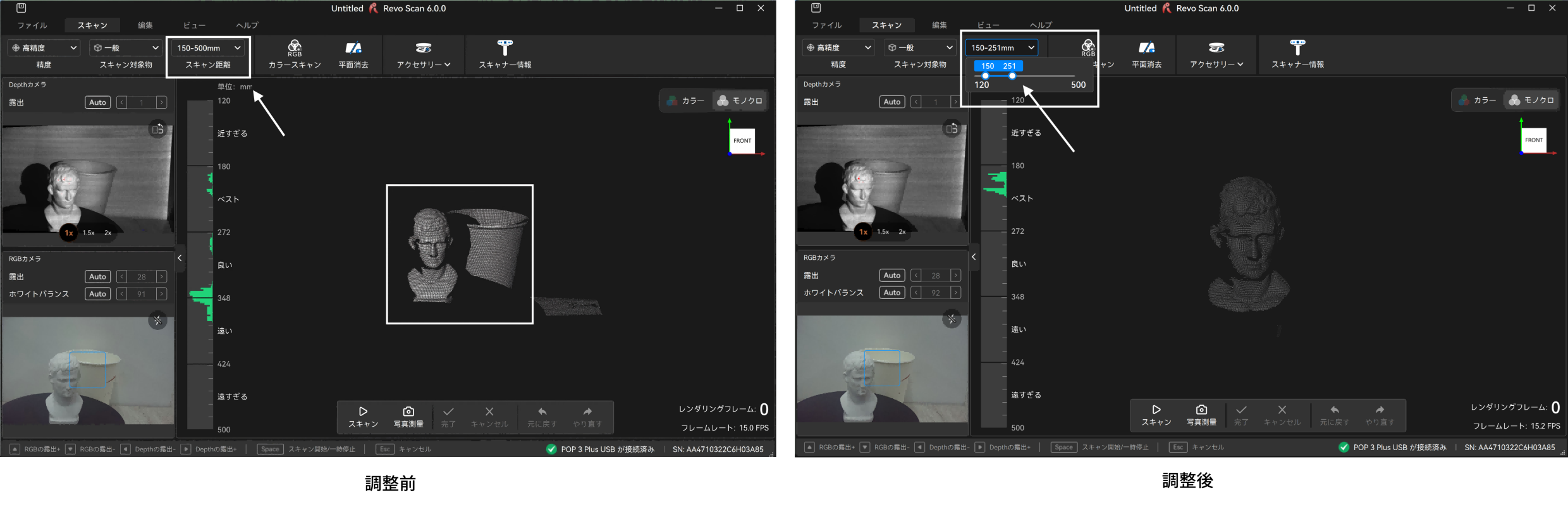
¶ 4.2.4 スキャン距離
Depthカメラの動作距離を調整し、データ取得の距離範囲を設定して、不要な背景を除去し、対象物を強調します。
¶ 4.2.5 カラースキャン

対象の色情報を取得するには、本ボタンをオンにしてカラースキャンを有効にします。カラースキャン時は、対象表面に十分で均一な照明を確保し、より良いカラーモデルを得てください
ご注意:テクスチャ機能は、カラースキャンを有効にしている場合のみ使用できます。
¶ 4.3 平面消去
平面消去:不要な平面データ(テーブルや床など)を検出して削除します。スキャン対象物自体に平面の特徴が多い場合は、対象物のモデルデータ自体が削除されるのを防ぐため、この機能をオフにしてください。
¶ 4.4 オブジェクトセグメンテーション
オブジェクトセグメンテーション:スキャン対象を手動で選択します(マウス左ボタンで追加、右ボタンで削除/長押しして塗りつぶし)。システムはその領域を自動でトラッキングし、継続的にスキャンします。処理中も選択範囲の追加・削除を随時行えます。背景が複雑で、対象物の色が比較的均一なシーンに適しています。
ご注意:オブジェクトセグメンテーション機能は、macOS/Windows システムに対応しており、PC性能に一定の要件があります。Windows システムでは、この機能の使用に NVIDIA GPU が必要です。以下のGPUモデルは互換性テストに合格しています。
RTX2060 Super、RTX 3070、RTX 4070、RTX 5070Ti、RTX5090、RTX2070 Super、RTX 3070 Ti、RTX4070 Ti、RTX5080、RTX A3000、RTX 2080 Super、RTX3500 ADA、RTX3080、RTX3080 Ti、RTX 4080、RTX4090、RTXA4500、RTXA5000、RTX 3050、RTX3090、RTX5060、RTXA6000、RTX3060、RTX3060Ti、RTX 4060、RTX4060 Ti、RTX5060 Ti、RTX5070
¶ 4.5 背景除去
背景除去:除去したい背景領域を手動で選択できます(マウス左ボタンで追加、右ボタンで削除/長押しして塗りつぶし)。システムは背景を自動的に無視し、対象物のスキャンを継続します。処理中も除外する背景の追加・削除を随時行えます。背景がシンプルで、対象物の色が比較的豊富なシーンに適しています。
ご注意:背景除去機能は、macOS/Windows システムに対応しており、PC性能に一定の要件があります。Windows システムでは、この機能の使用に NVIDIA GPU が必要です。以下のGPUモデルは互換性テストに合格しています。
RTX2060 Super、RTX 3070、RTX 4070、RTX 5070Ti、RTX5090、RTX2070 Super、RTX 3070 Ti、RTX4070 Ti、RTX5080、RTX A3000、RTX 2080 Super、RTX3500 ADA、RTX3080、RTX3080 Ti、RTX 4080、RTX4090、RTXA4500、RTXA5000、RTX 3050、RTX3090、RTX5060、RTXA6000、RTX3060、RTX3060Ti、RTX 4060、RTX4060 Ti、RTX5060 Ti、RTX5070
¶ 4.6 アクセサリー接続
¶ 4.6.1 2軸ターンテーブル
2軸ターンテーブルを選択し、Bluetoothで Revo Scan 6 に接続します。必要に応じて、回転速度、間隔角度、回転方向などを設定します。
- 回転速度(35~90秒/回転):プラッタが水平軸の周りを連続回転して1周に要する時間。例:30 s/r は1回転に30秒です。
- 傾斜角度(± 30°):2軸ターンテーブルの天板の傾き角度です。
- 間隔角度(自動モード時に設定可能):隣接する撮影位置間の回転角度。例:間隔角度を30°に設定すると、ターンテーブルは30°ごとに停止して撮影し、撮影後さらに30°回転します。
2軸ターンテーブルの詳細は、『2軸ターンテーブル クイックスタートガイド』をご覧ください。
¶ 4.6.2 ハンドヘルドスタビライザー
ハンドヘルドスタビライザーを使用すると、スキャン時の安定性が向上し、手ブレによる点群精度の低下やトラッキングロストなどの問題を効果的に改善できます。
詳細は『ハンドヘルドスタビライザー ユーザーマニュアル』をご覧ください。
¶ 4.6.3 大型電動ターンテーブル
Revopoint 大型電動ターンテーブルは、大型オブジェクトや人体のスキャン向けに設計されています。ACアダプターで給電し、最大耐荷重は200 kgです。接続後は、リモコンまたはアプリ(Revo Assistant)で回転速度や方向を制御できます。
詳細は『大型電動ターンテーブル取扱説明書』をご覧ください。
¶ 4.7 スキャナー情報

上部メニューの「スキャナー情報」をクリックすると、接続中のスキャナーの基本情報を確認できます(デバイスモデル、シリアル番号、ファームウェアバージョン、最終校正日時を含む)。
¶ 4.8 ミラーリングと全画面表示
ミラーリング:Revo Mirror ソフトウェアを使用して、PC画面をモバイルデバイスにミラーリングできます。スキャンの進行状況をリアルタイムでプレビューおよび操作できます。画面共有の詳細な操作手順については、「Revo Mirror ユーザーマニュアル」をご参照ください。
全画面表示:「全画面」ボタンをクリックすると、全画面プレビュー画面に入ります。終了する場合は、「全画面終了」をクリックするか、ショートカットキー(Shift + M)を使用してください。
¶ 4.9 カメラ設定
¶ 4.9.1 Depthカメラ
良質な3Dモデルを得るため、スキャン開始前にDepthカメラの露出を調整することが重要です。
 |
• 露出の調整 「Auto」ボタンをクリックして自動露出をオンにします。もう一度クリックすると自動露出をオフにでき、スライダーで露出値を手動調整します。正確なスキャンのため、対象表面の赤色および青色の領域ができるだけ少なくなるように露出を調整してください。  • デジタルズーム 小さな対象をスキャンする際、デジタルズームで対象を拡大表示し、表面の取得状況をより明瞭に確認できます。 • 光学ズーム(MIRACO Plus/POP 3 Plus のみ対応) 小さな対象をスキャンする際、最大1.5X/2Xの光学ズームで対象表面のデータをより鮮明に取得できます。 
|
ラインレーザーモードでスキャンする場合、Depthカメラのウィンドウは以下のように表示されます。
.png) |
• Depthカメラの露出 Depthカメラの露出は、自動露出または手動調整に設定できます。通常はシステムのデフォルトパラメーターを使用することを推奨します。手動で露出を調整する場合は、Depthカメラのウィンドウ内で対象物の色がグレーになり、レーザーラインがはっきり見えることを確認してください。 • レーザーの明るさ レーザースキャンモード使用時のみ利用できます。 スキャン結果への影響を避けるため、デフォルト値の使用を推奨します。
|
¶ 4.9.2 RGBカメラ
スキャン中に対象の色を正確に取得するため、柔らかく均一な照明下に置き、RGBカメラの露出とホワイトバランスを調整して、プレビューでの明るさ・色味が実物と概ね一致するように設定してください。
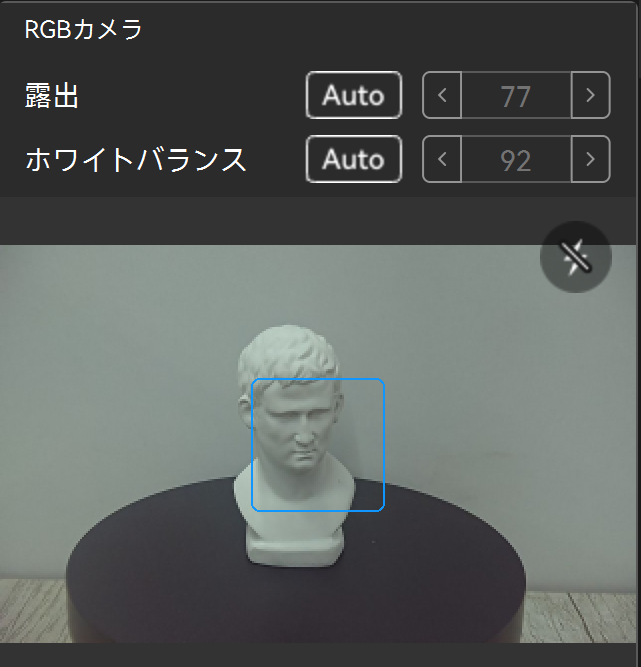 |
• 露出の調整 「Auto」ボタンで自動露出をオン/オフし、オフ時はスライダーで露出値を手動調整します。  • ホワイトバランス 「Auto」ボタンで自動ホワイトバランスをオン/オフし、オフ時はスライダーで調整します。色味が実物と一致するよう、暖色/寒色に寄り過ぎないようにしてください。 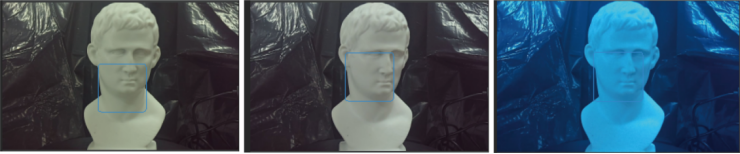 • LED補助照明 マーカートラッキングでスキャンする場合、RGBカメラのLED補助照明をオンにすると、カラースキャンの結果が向上し、マーカーがより明瞭になります(補助照明を搭載したスキャナーのみ対応)。 |
¶ 4.10 スキャン距離バー
 |
距離バーは、対象とスキャナー間の距離の分布を示します。スキャン開始前に距離設定を整えてください。スキャン中は、ヒストグラムが緑色の状態(ベスト/良い)に入るよう維持することを推奨します。
|
¶ 4.11 スキャンコントロール

 /
/ :クリックすると、スキャンを開始/一時停止できます。スキャン完了後、モデルをさらに補完したい場合はスキャン画面に戻り、
:クリックすると、スキャンを開始/一時停止できます。スキャン完了後、モデルをさらに補完したい場合はスキャン画面に戻り、 ボタンをクリックして追加スキャンを行ってください。
ボタンをクリックして追加スキャンを行ってください。
 :「開始」ボタンをクリックするたびに、スキャナーが1フレームをキャプチャします。単発撮影スキャンでは、次のフレームは前のフレームの点群と少なくとも50%重なっている必要があります。
:「開始」ボタンをクリックするたびに、スキャナーが1フレームをキャプチャします。単発撮影スキャンでは、次のフレームは前のフレームの点群と少なくとも50%重なっている必要があります。
 :クリックすると本スキャンを終了し、モデル編集画面に移動します。
:クリックすると本スキャンを終了し、モデル編集画面に移動します。
 :クリックして本スキャンをキャンセルします。
:クリックして本スキャンをキャンセルします。
 /
/ :一時停止中にクリックすると、スキャンデータを取り消す(Ctrl+Z)またはやり直す(Ctrl+Y)ことができます。
:一時停止中にクリックすると、スキャンデータを取り消す(Ctrl+Z)またはやり直す(Ctrl+Y)ことができます。
¶ 5. モデル編集
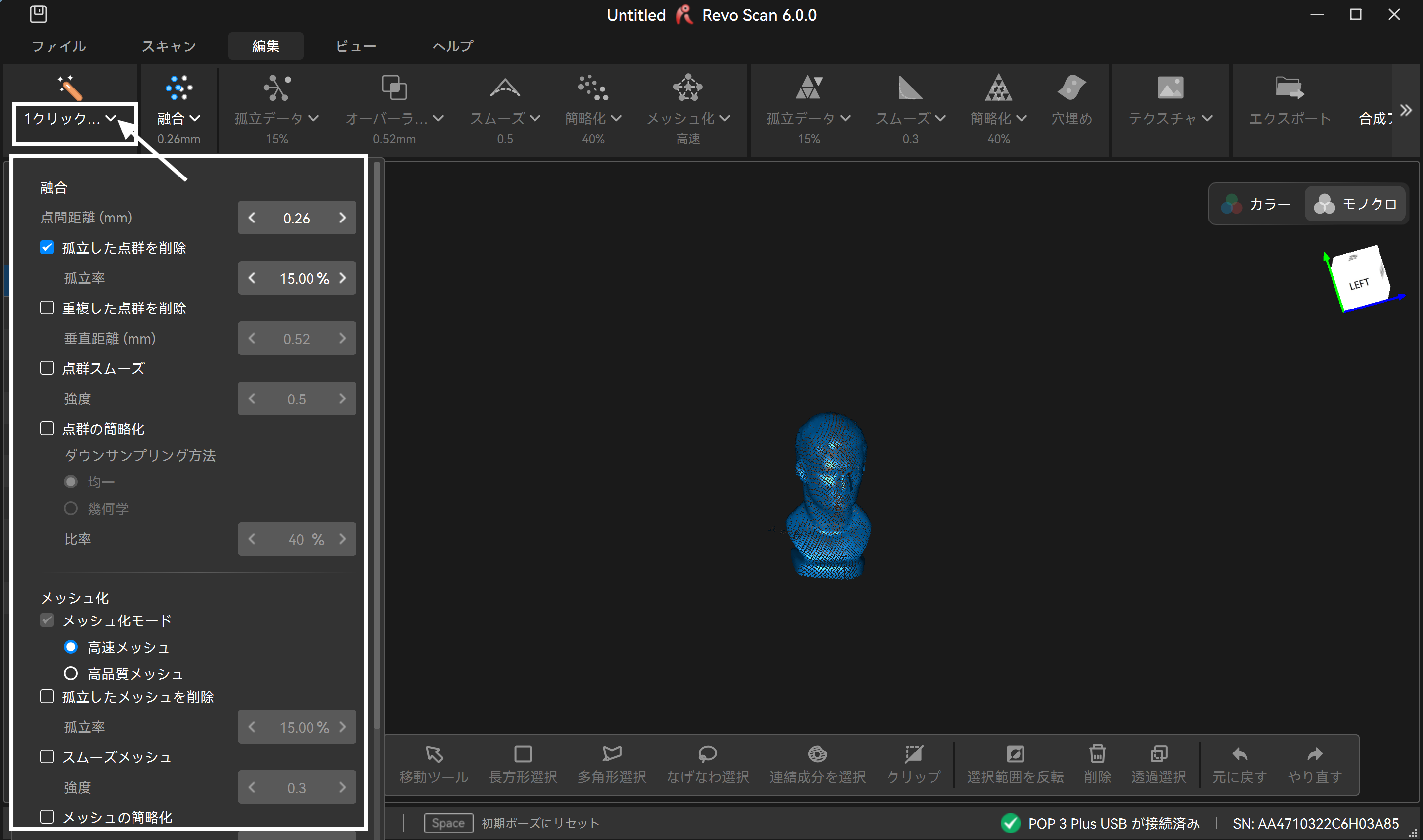
¶ 5.1 1クリック編集
ソフトウェア推奨の最適パラメータに基づき、ワンクリックでモデル処理を完了できます。必要に応じて各パラメータを手動調整し、点群の融合、メッシュ化、テクスチャマッピング(カラースキャン有効時)を順に実行することもできます。
各パラメータの設定後、「適用」または「1クリック編集」アイコンをクリックして実行します。
注:初心者の方は「1クリック編集」をお試しください。自動で後処理を実行します。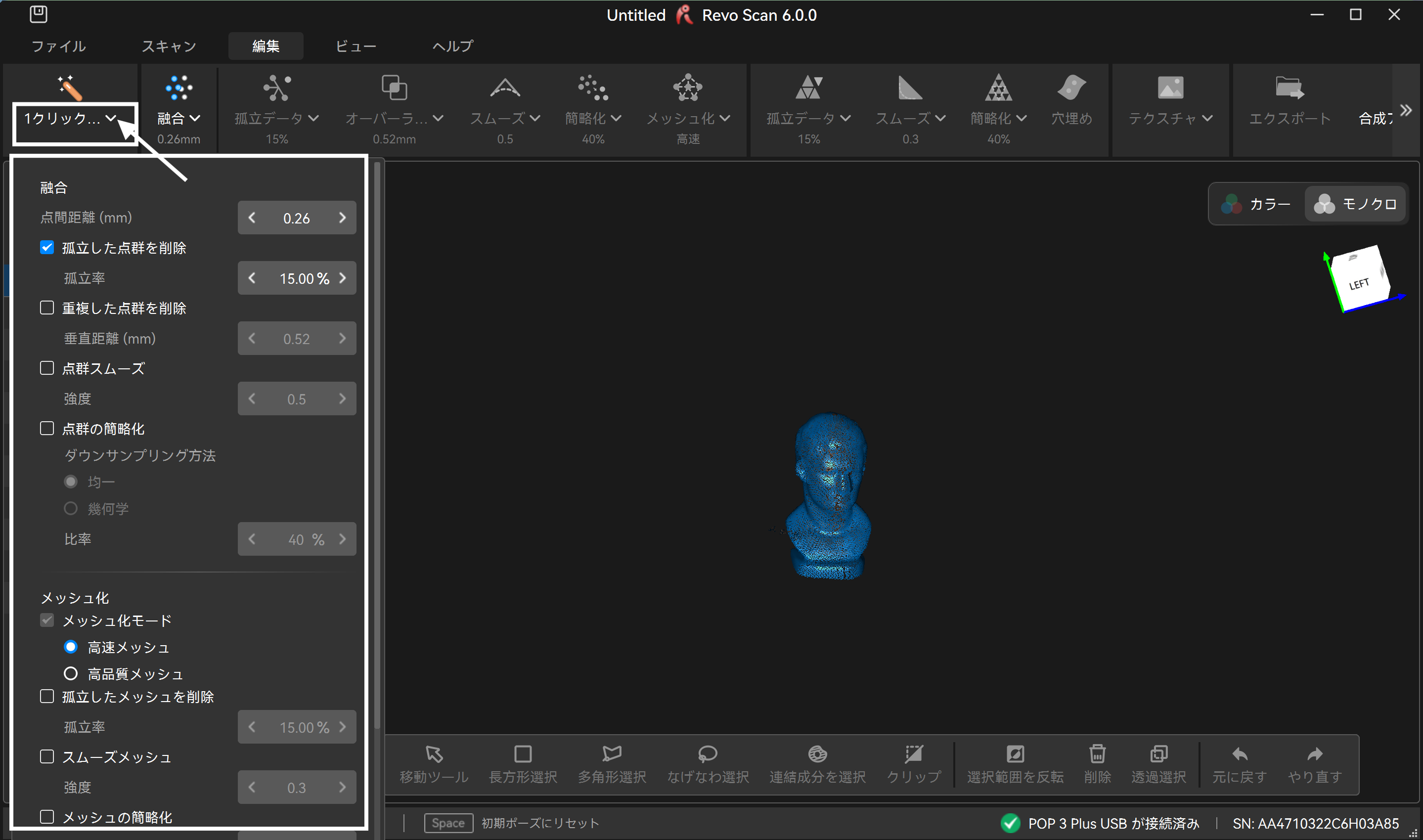
¶ 5.2 点群
点群処理は、点群融合やアイソレーション除去によってデータを整え、メッシュ・モデル処理の土台となる点群を高品質化する機能です。
¶ 5.2.1 点群融合
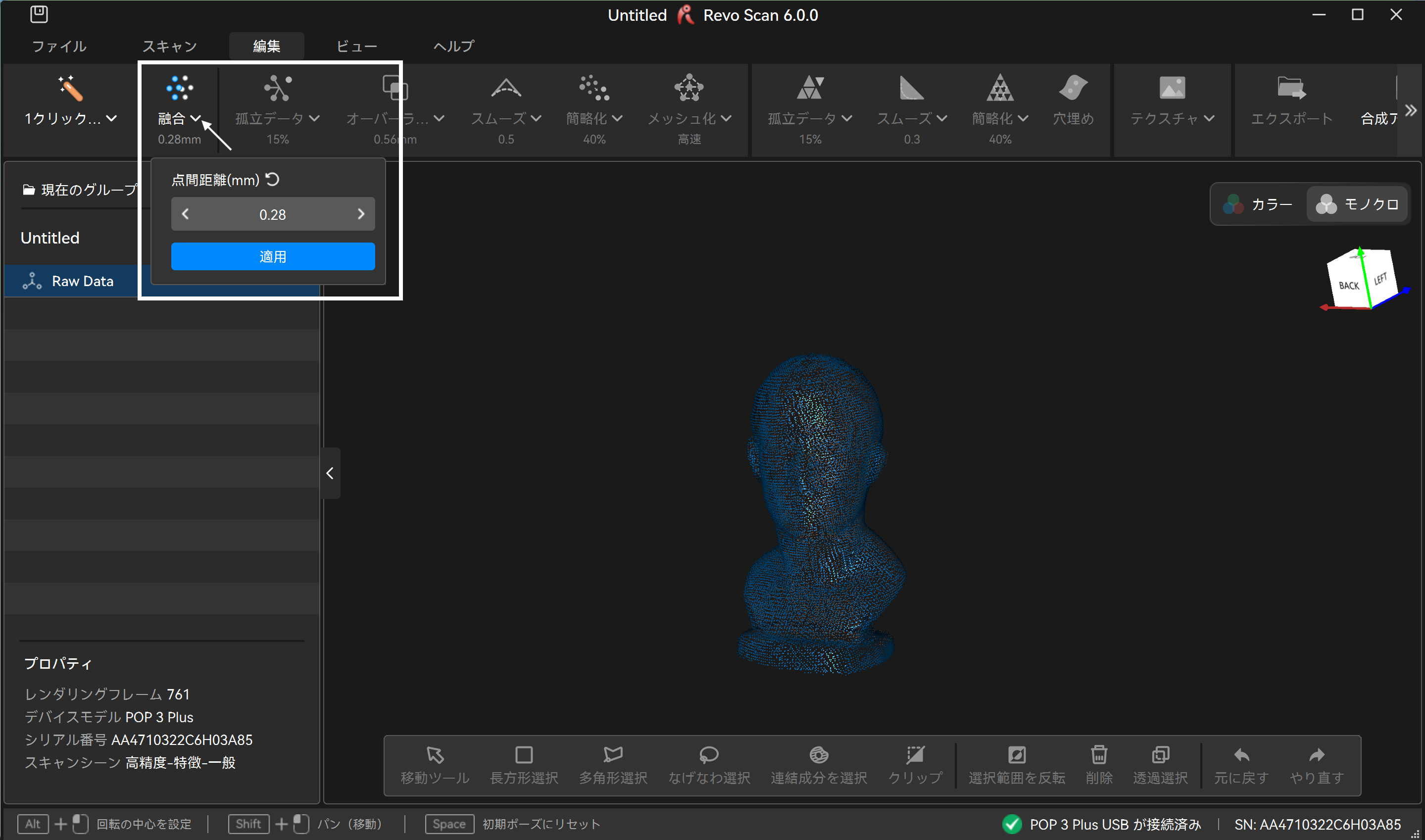
点群融合は、スキャナーで取得した元のスキャンデータを統合し、1つの完全な点群モデルにするプロセスです。
点間距離:融合後の点群モデルで、隣接点同士の平均距離を指します。Revo Scan 6 は対象に応じて最適な点間距離を自動生成しますが、必要に応じて手動設定も可能です。
点群融合では、点間距離が大きいほどモデルのディテールは少なくなり、小さいほどディテールは増え、データ量も大きくなります。
ご注意:モデルを合成する場合、各モデルの点間距離はできるだけ近い値に設定すると合成結果が向上します。
マーカーの除去(マーカー/全域マーカー使用の場合):オンにして貼り付けたマーカーに対応する内径を選択すると、ソフトウェアがマーカーの遮蔽によって生じたモデル表面の隆起点群を自動的に検出して削除します。マーカーの内径が大きいほど、削除後に残る穴は大きくなります。
ご注意:インポートした Revo Scan 5 ファイルでは、6 mm のマーカーのみ選択可能です。
オフセット除去量(mm):デフォルトのマーカー除去直径を基準に除去範囲を調整し、マーカーの縁の残留がスキャンデータに影響するのを防ぐために使用します。
点間距離を設定したら、「適用」または「融合」アイコンをクリックして実行します。
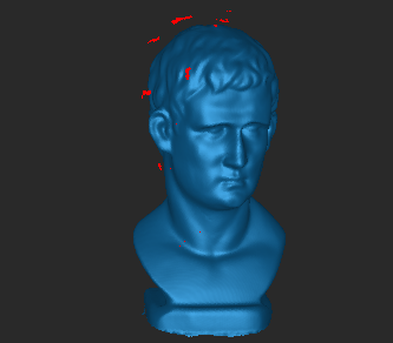
¶ 5.2.2 点群アイソレーション検出
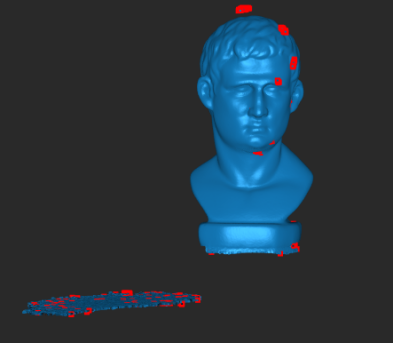 |
下向き矢印ボタンをクリックして検出を実行し、主体の点群モデルから分離した孤立点群データ(左図の赤色エリア)を削除します。 孤立率:孤立点群に含まれる点の数が、モデルの総点数に占める割合です。孤立率を高く設定するほど、検出・削除される孤立点群が増えます。 |
¶ 5.2.3 点群オーバーラップ検出
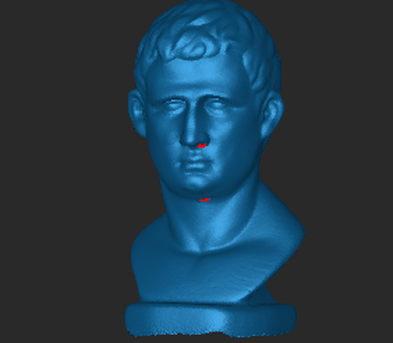 |
下向き矢印ボタンをクリックして検出を実行し、点群内の重複および不要なデータを削除します。重複が検出されなくなるまで繰り返し実行できます。 垂直距離:点群モデル周辺のノイズとモデル表面との距離を指します。垂直距離が設定値未満の場合はノイズとして削除し、設定値を超える場合は正常なモデルデータとして保持します。 |
¶ 5.2.4 スムーズ点群
点群モデル表面のノイズやバリを低減し、より滑らかにします。
スムーズ強度が高いほど効果は大きくなりますが、モデルのディテールは少なくなります。
回数:連続してスムーズ処理を行う回数です。値が大きいほど点群は滑らかになりますが、ディテールは少なくなります。
ご注意:幾何特徴が豊富なモデルでは、過度なスムーズ処理によりディテールが失われる場合があります(下図参照)。

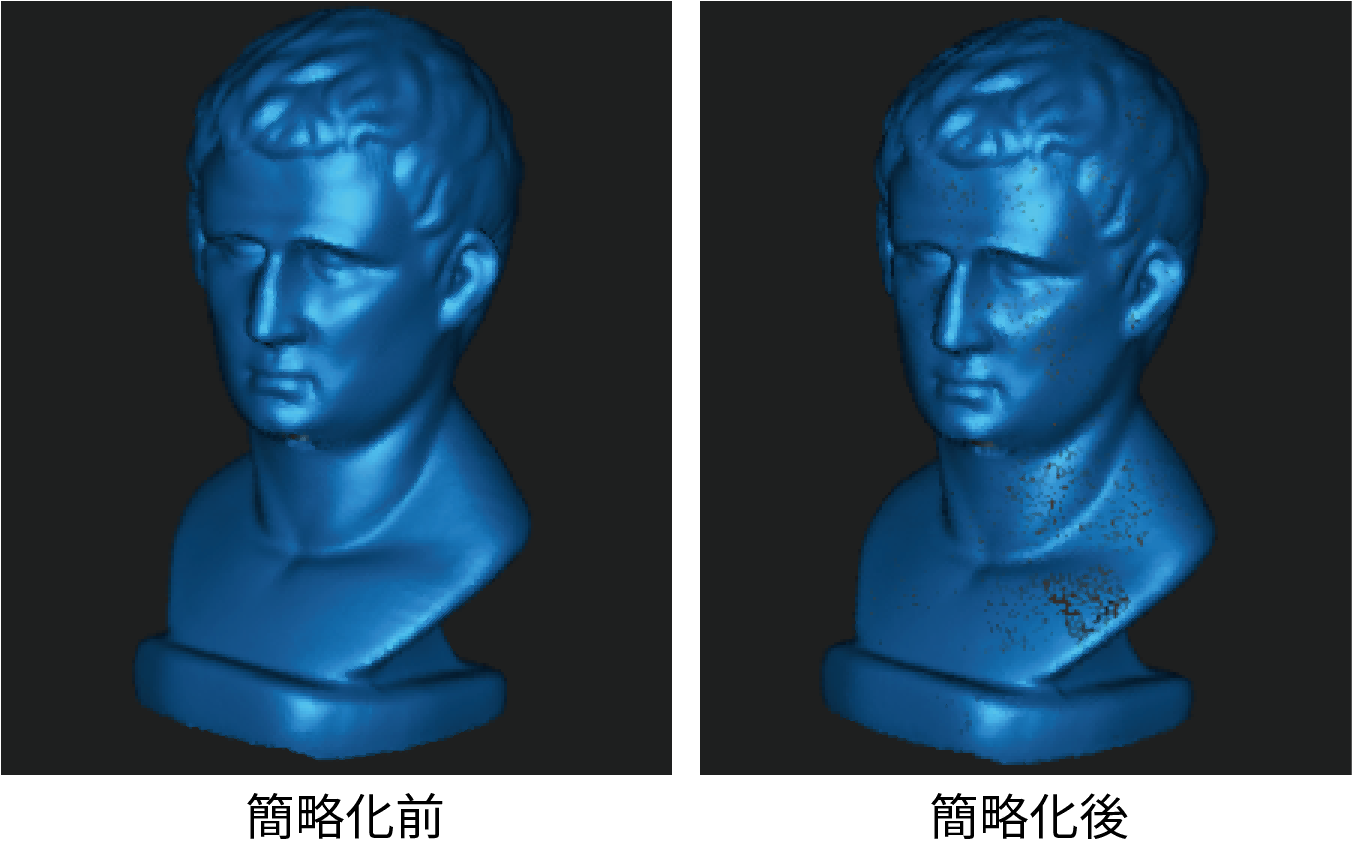
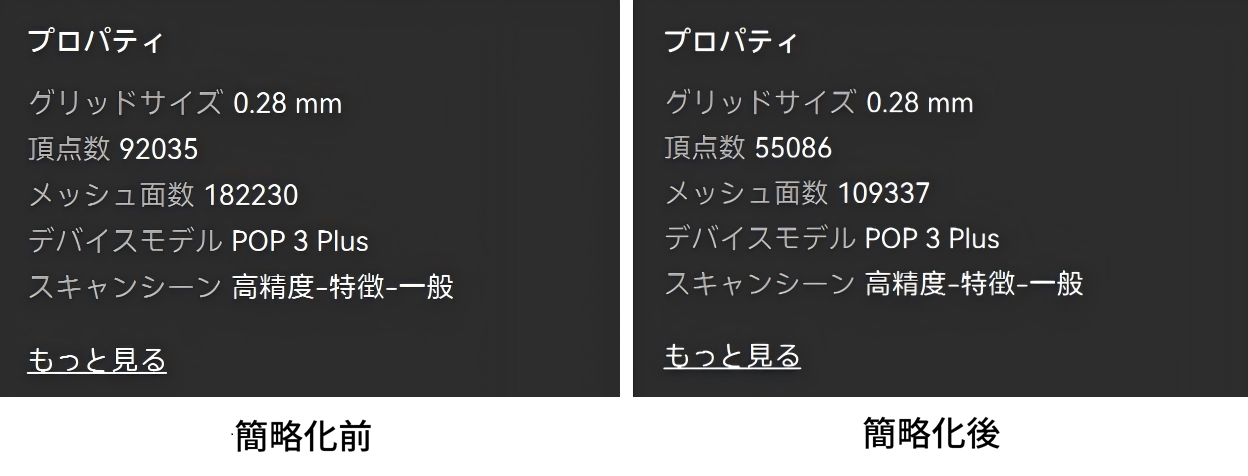
¶ 5.2.5 点群の簡略化
点群モデルの局所密度を下げ、データ量を削減して、処理・保存・転送時間を短縮します。簡略化には2種類のサンプリング方式があります。
• 均一ダウンサンプリング:モデル全体の点を比較的均一にサンプリングします。
• 幾何学的ダウンサンプリング:モデルの幾何構造に基づくスマートサンプリングで、ディテールをできるだけ保持します。
簡略化率:削減される点群数が総点群数に占める割合です。値が高いほど削除される点群が増え、モデルのデータ量は小さくなります。
ご注意:簡略化率を高くし過ぎるとモデル品質に影響する可能性があります。
¶ 5.2.6 メッシュ化
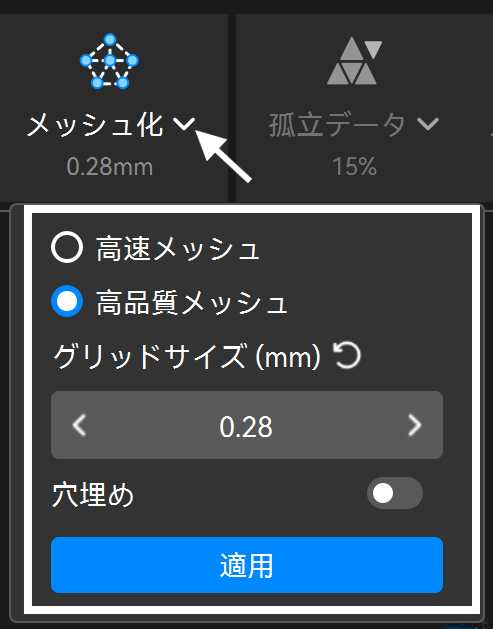 |
メッシュ化は、離散した点群データを三角形面で結び、連続メッシュを生成するプロセスです。メッシュ化には2つの方式があります。 • 高速メッシュ:システムが点間距離に基づいて最適なパラメータを自動で推奨し、点群を三角形メッシュ化して、メッシュモデルを迅速に生成します。メッシュ生成結果を素早くプレビューしたい場合に適しています。 • 高品質メッシュ:カスタム品質パラメータで三角形メッシュ処理を行い、メッシュモデルを生成します。 ①メッシュ品質:メッシュモデルの密度と精細さ。数値が高いほど密度が増し、モデルは精細になりますが、処理時間は長くなります。 ②穴埋め(自動):モデル表面の孔や欠損領域を自動で検出し、補完します。 ご注意:「穴埋め(自動)」は小さな孔の補完に適しています。大きな孔はメッシュ編集の「手動穴埋め」をご利用ください。 |
¶ 5.3 メッシュ
メッシュ処理画面では、点群データから生成された初期メッシュモデルに対してさらなる最適化を行い、モデルの構造と表面品質を向上させ、テクスチャマッピングにも対応します。
¶ 5.3.1 メッシュアイソレーション検出
 |
下向き矢印ボタンをクリックして検出を実行し、主体メッシュから分離した孤立メッシュデータ(左図の赤色エリア)を削除します。 孤立率:孤立メッシュの面数が総メッシュ面数に占める割合です。値が高いほど検出される孤立面が増えます。 |
¶ 5.3.2 スムーズメッシュ
メッシュモデル表面のノイズやバリを低減し、より滑らかにします。
スムーズ強度が高いほど効果は大きくなり、モデルのディテールは少なくなります。
¶ 5.3.3 メッシュの簡略化
メッシュモデルのデータ量を削減し、処理・保存・転送時間を短縮します。
簡略化率:削減されるメッシュデータ量が総メッシュデータ量に占める割合です。値が高いほど削除される面・頂点が増え、データ量は小さくなります。
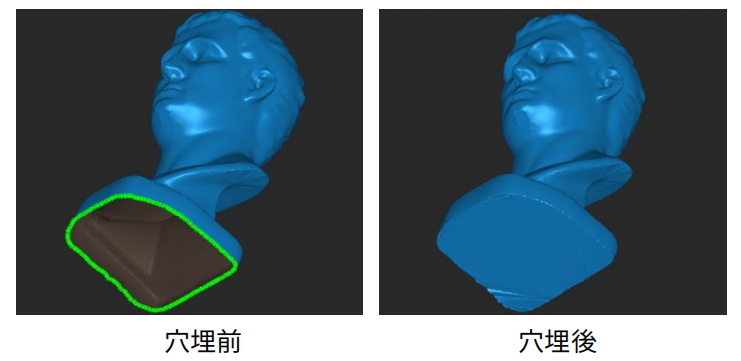
¶ 5.3.4 穴埋め
メッシュモデルの表面に欠損箇所を検出します。補修したい穴の境界エッジをクリックし、曲面または平面で埋める方法を選択してください。(複数の穴を選択する場合は、下部の選択ツールをご使用ください)
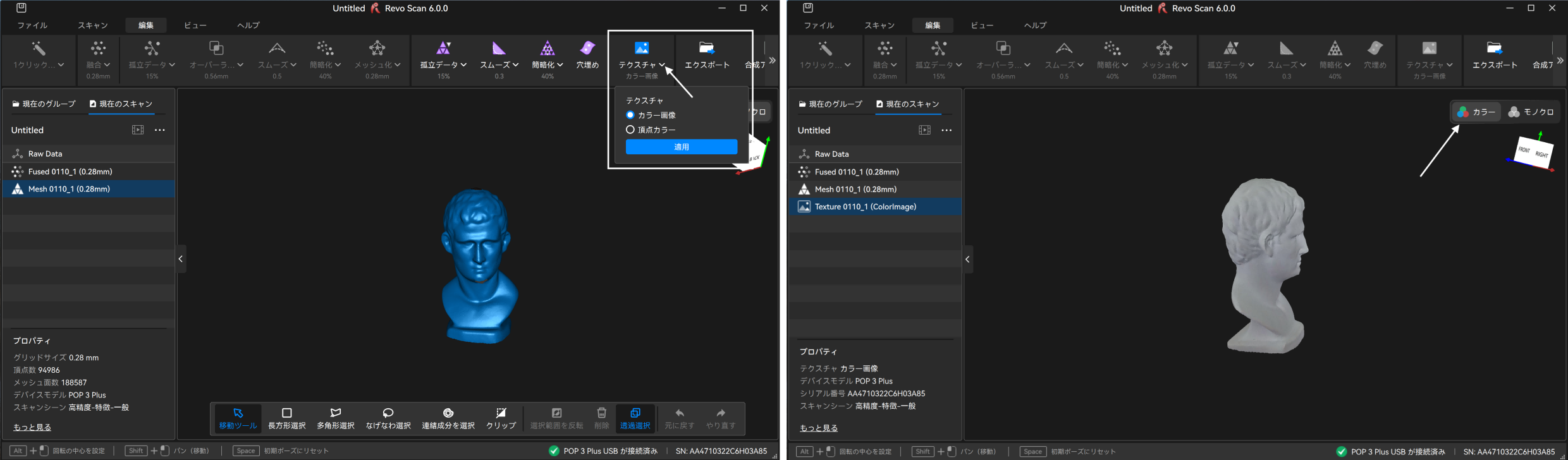
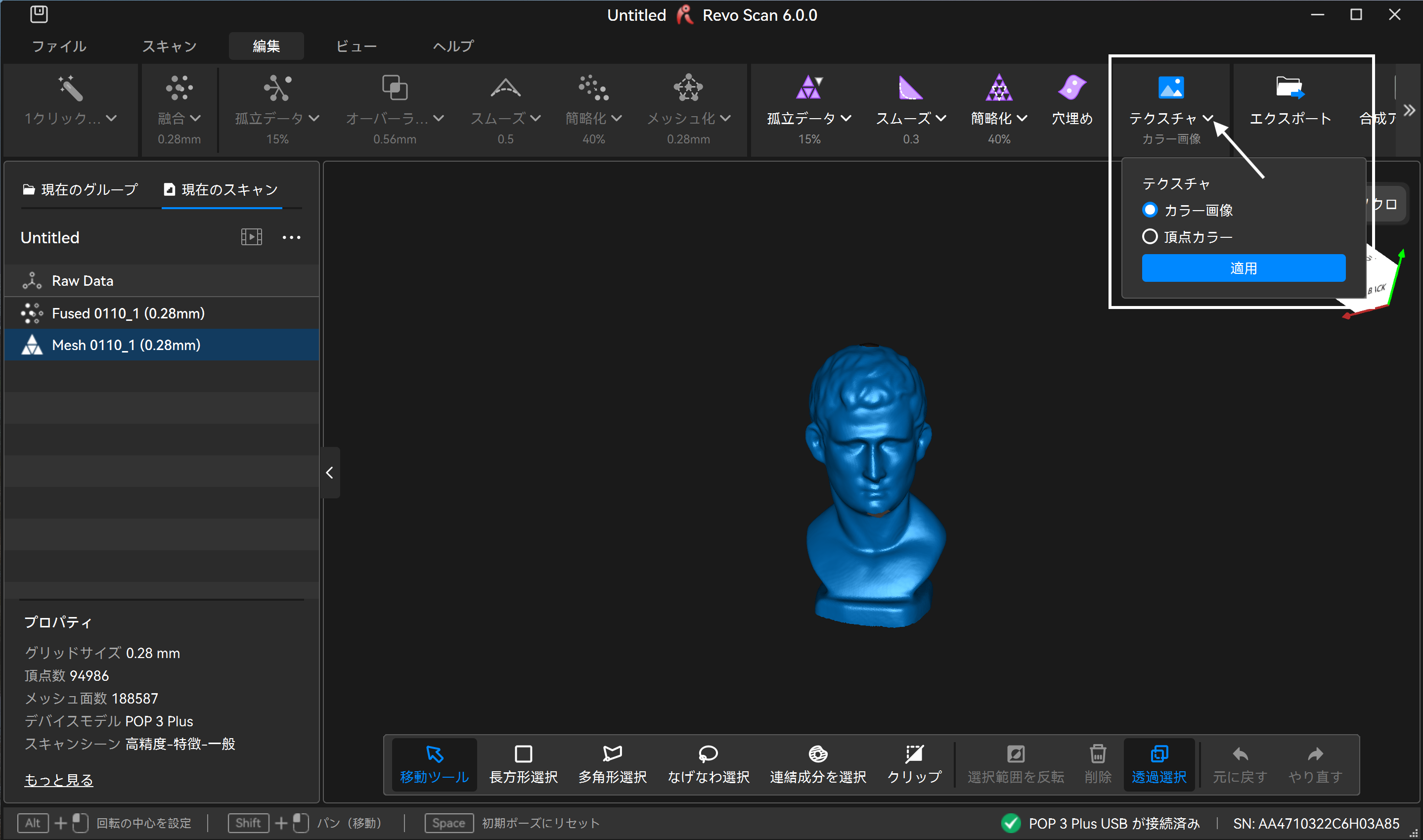
¶ 5.4 テクスチャ
スキャンを開始する前にスキャン設定でカラースキャンを有効にすると、メッシュモデルにテクスチャマッピングできます。テクスチャマッピングは、カメラが取得したRGB画像を処理済みのメッシュモデルに適用し、よりリアルな色彩を再現する機能です。以下の2方式に対応します。
• カラー画像
スキャン中にRGBカメラが取得したカラー画像をメッシュ表面にマッピングしてテクスチャを生成します。
• 頂点カラー
メッシュモデルの頂点色に基づいてテクスチャ画像を生成します。
「適用」または「テクスチャ」アイコンをクリックして実行します。
¶ 5.5 3DGS(POP 4のみ対応)
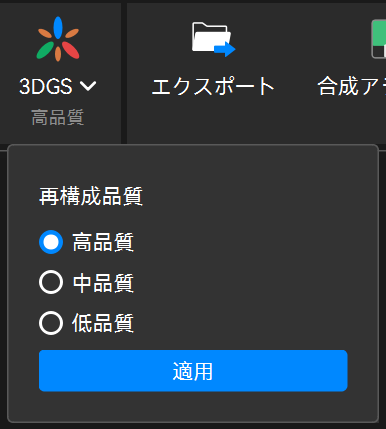 |
ガウシアンスプラッティングによる3Dモデリング技術に基づき、点群と RGB スキャンデータを 1:1 のリアルなガウスモデルに変換します。精度を確保しながら、表面ディテールとリアリティを向上させることができます。 ご注意:スキャナーの機種によって、対応するスキャン対象物の種類や対象物サイズは異なります。 3DGS機能を使用するには、スキャン前に「カラースキャン」を有効にして RGB 画像を取得する必要があります(カラートラッキングモードでは、ソフトウェアがデフォルトでカラースキャンを有効にします)。より良い 3DGS 再構成結果を得るため、スキャン中は機器を安定して保持し、ブレを減らしてください。できるだけ多角度から対象物の周囲を回りながら全面的に取得し、カラー画像のフレーム数を十分に確保して、モデル表面情報を完全に記録してください。 3DGSはメッシュ化完了後にのみ使用できます。ニーズおよび GPU 性能に応じて対応するモデル品質を選択してください。*.splat などの形式でエクスポートできます。 ご注意:Windows システムでは、この機能は現在 NVIDIA GPU のみ対応しています。品質と必要VRAMの対応は次のとおりです。低品質(4GB 以上)、中品質(6GB 以上)、高品質(8GB 以上)。選択する品質が高いほど、GPU性能への要求が高くなり、ソフトウェアの処理時間も長くなります。 |
¶ 5.6 ツールバー
不要な部分的なモデルデータを手動選択し、詳細編集や削除を行うための各種ツールを提供します。
ご注意:未処理のRawデータやテクスチャモデルではツールバーは使用できません。
 |
移動ツール(ショートカットキー:V) ドラッグでモデルを任意の方向に回転して閲覧できます。本ツールをクリックすると、他の選択ツールで囲んだ選択を解除します。 |
 |
長方形選択(ショートカットキー:M) モデル表面でマウス左ボタンを押しながらドラッグすると、長方形の選択枠を作成できます。枠内の3Dモデルデータが選択されます。 |
 |
多角形選択(ショートカットキー:L) モデル表面に多角形の選択範囲を定義します。モデル上をクリックして起点を設定し、カーソルを移動して再度クリックすると1本目の線分を作成します。同様にクリックを続け、目的の領域を囲んで選択を完了します。 |
 |
なげなわ選択(ショートカットキー:U) マウス左ボタンを押しながらドラッグして、不規則な多角形領域を選択します。ボタンを放すと、起点と現在位置が自動的に結ばれ、閉じた多角形として選択が完了します。 |
 |
連結成分を選択(ショートカットキー:B) 連結成分とは、3次元空間で相互に接続している点や面の集合を指します。左クリックで領域を指定すると、その領域に連結している点や面を自動判別して選択します。 |
 |
クリップ(ショートカットキー:C) カーソルを合わせ、マウス左ボタンを押したままドラッグすると、クリップ平面が矢印付きの直線で表示され、矢印方向側のモデルが選択されます。<Delete<キーで選択データを削除し、<Esc<キーで選択を解除します。 |
 |
選択範囲を反転(ショートカットキー:Ctrl+Shift+I) 選択中エリアと未選択エリアを切り替えます。 |
 |
削除(ショートカットキー:Delete) クリックして選択データを削除します。あるいは <Delete<キーでも削除できます。 |
 |
透過選択(ショートカットキー:Ctrl+Shift+T) 長方形選択、なげなわ選択などと併用します。モデル表面の選択領域と同じ深度にあるすべてのデータを同時に選択します。 |
|
|
元に戻す(ショートカットキー:Ctrl+Z) 操作を取り消して一つ前の状態に戻ります。 |
|
|
やり直す(ショートカットキー:Ctrl+Y) 取り消した操作をやり直します。 |
¶ 5.7 アライメント
点群モデルのアライメントは、同一物体を複数回スキャンして得られた各部位の点群データを統合し、1つの完整な3Dモデルにまとめる機能です。大きな対象物を分割してスキャン/処理する場合に適しています。なお、結合元として使用できる点群は、融合済みの点群モデルに限られます。
以下の2つの方法でアライメントに入ることができます。
① ファイル管理で右下の「アライメント」ボタンをクリックすると、モデルアライメントに入ります。適切な方式を選択し、左側でアライメントしたいモデルにチェックを入れてアライメントを実行します。
② ファイル管理ではスキャンファイルをグループ化できます。グループ内で右下の「アライメント」ボタンをクリックしてモデルアライメントに入ります。適切な方式を選択し、そのグループ内でアライメントしたいモデルにチェックを入れてアライメントを実行します。
アライメントは手動アライメントと特徴アライメントの2方式です。
¶ 5.7.1 手動アライメント
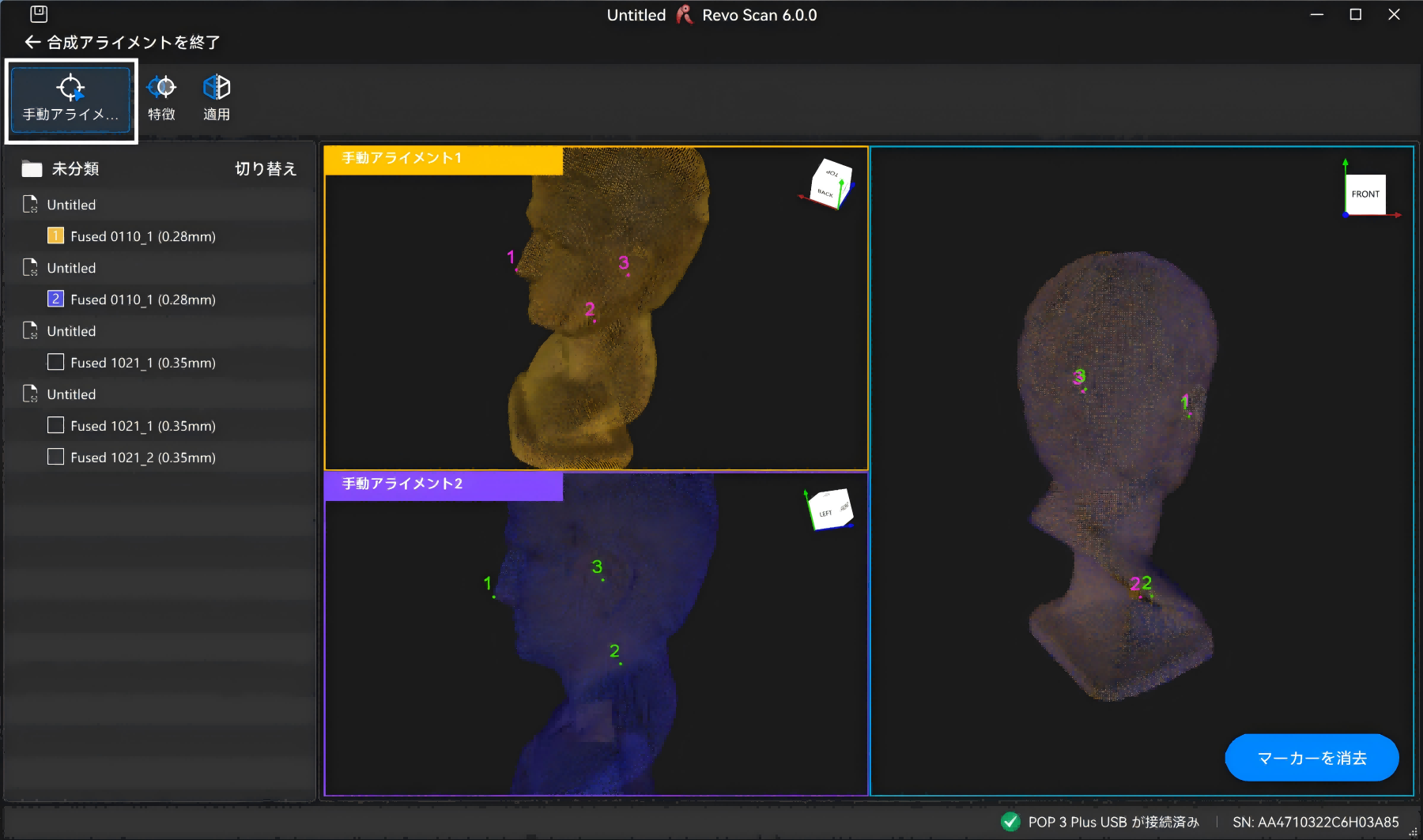
2つのモデルの同一位置に、それぞれ3点以上の対応点を手動でマーキングします。重なり合う点群の相対位置関係を認識してアライメントを行います。1回の合成で最大2モデルまで対応します。
• 2つのモデル上の対応マーカー数は同数で、少なくとも3組必要です。
• 1つのモデル内の複数マーカーは、できるだけ離れた位置に分散して配置してください。
• より正確にマーカーを配置するため、モデル上にカーソルを置いてマウスホイールで拡大しながら作業してください。
手動で点を選択し終えたら、「適用」をクリックして、合成完了までお待ちください。
¶ 5.7.2 特徴アライメント
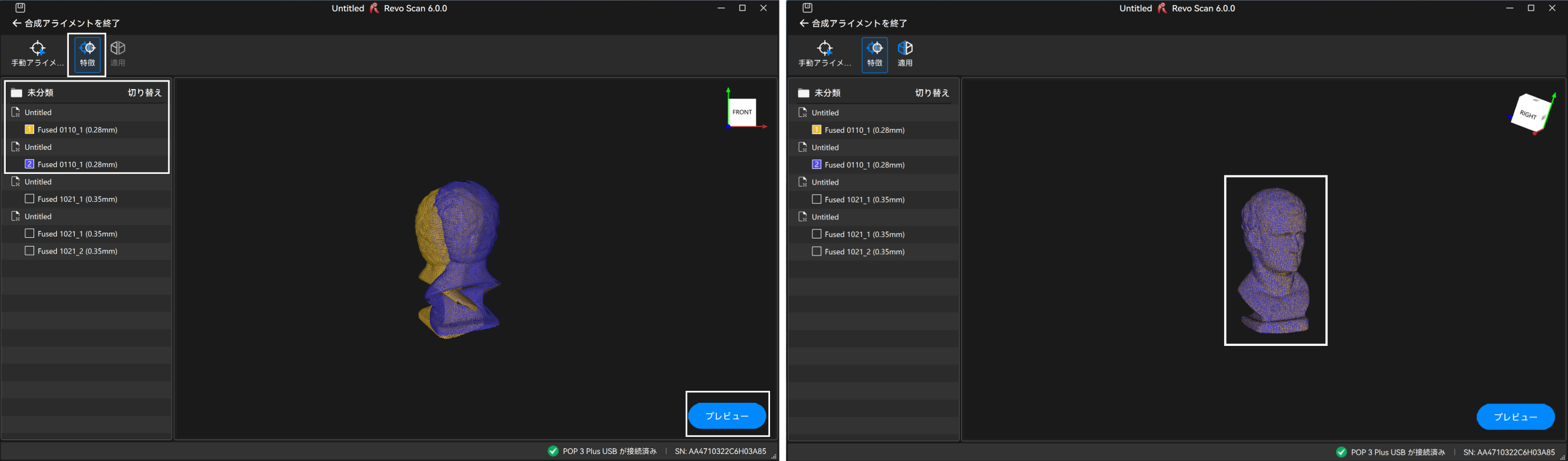
合成したいモデルにチェックを入れると、システムがモデル上の重複特徴を自動検出して合成します。任意の2モデル間の重なり面積は10%以上である必要があります。より良い結果のため、重なりを40~50%に保つことを推奨します。1回のアライメントで最大9モデルまで選択可能です。
まず「プレビュー」をクリックして結果を確認し、問題なければ「適用」をクリックして合成を実行します。
¶ 5.8 キーフレーム編集
キーフレーム編集は、点群の融合前にRawデータを編集するための機能です。モデルデータをフレームごとに再生して、問題のあるフレームへすばやく移動し、フレーム削除を行えます。
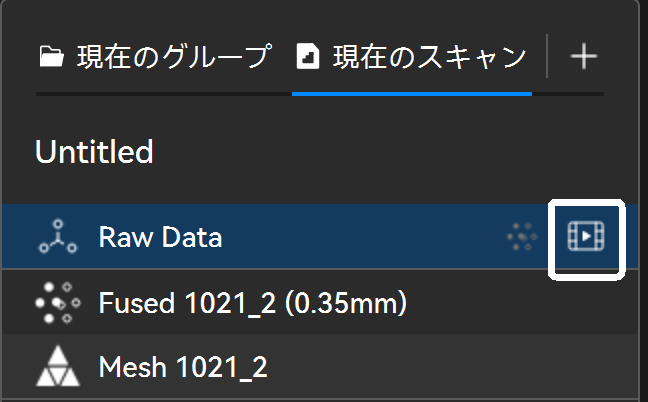 |
モデル一覧で「元の点群」モデルの右側にある  アイコンをクリックすると、キーフレーム編集画面に入ります。キーフレームの編集方法は次の2種類です: アイコンをクリックすると、キーフレーム編集画面に入ります。キーフレームの編集方法は次の2種類です: |
1) 自動再生ボタン  をクリックしてスキャン過程をフレームごとに再生します。削除したいフレームを選択し、右側の ボタンで削除します。
をクリックしてスキャン過程をフレームごとに再生します。削除したいフレームを選択し、右側の ボタンで削除します。
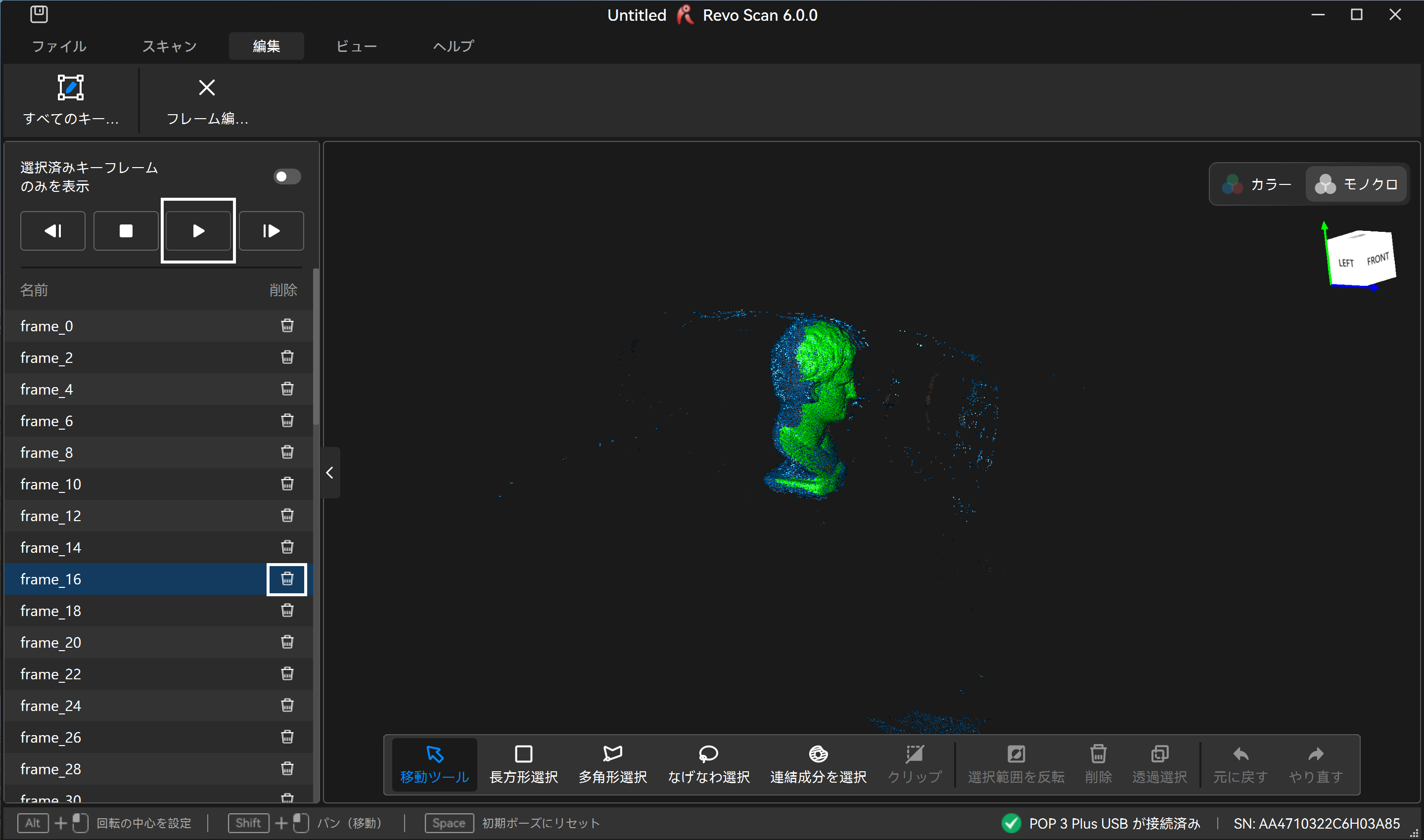
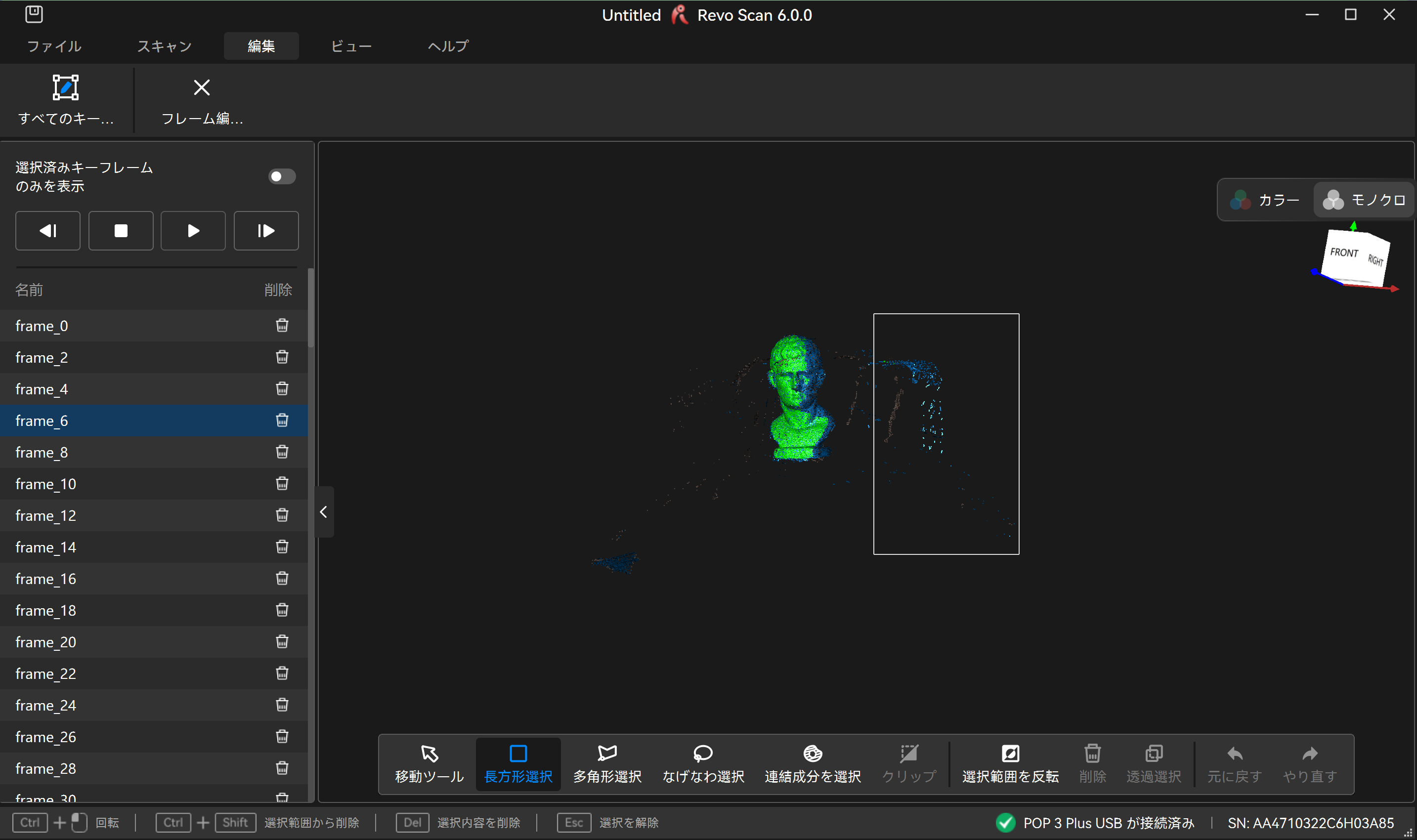
2) キーフレーム編集画面で、下部ツールバーの選択ツールを使用して、モデル上の不要なデータを選択します。ツールバーの ボタンをクリックして削除してください。(一括で複数のスキャンフレームを削除したい場合は、一覧でマウスの左ボタンを押したままドラッグして複数選択して削除できます)
¶ 5.9 ビュー
- 透視投影ビュー
透視投影ビューでは、カメラは空間内の固定点にあり、モデル間の奥行きと距離が異なります。
- 平行投影ビュー
平行投影ビューでは、すべてのモデルが同一の縮尺で表示され、三次元(幅・高さ・奥行き)の情報が二次元平面に投影されるため、相対的な大きさや位置関係は変わりません。
- モデルの裏面を表示
モデルの裏面色を茶色または透明で表示します。
- メッシュモデルの表示
メッシュモデルはソリッド、ワイヤーフレーム、ソリッドワイヤーフレームの3種類で表示できます。
- デフォルト位置
スキャン時のモデルの初期位置を表示します。
- 境界ボックスを表示
モデルの3D空間における立方体の境界を表示します。
- 回転ボールを表示
XYZ回転による3D空間内の動作軌跡を表示します。
- 地平面グリッドを表示
水平線と垂直線からなる仮想3Dグリッドを表示し、モデルの位置決めとアライメントに役立てます。
- モデルのマテリアル表示
モデル表示の色や材質を選択できます。
¶ 6. スキャナーの校正
 |
Revo Scan 6 は、最良の精度を得るために、3Dスキャナーの再校正に対応しています。スキャナーは出荷時に専門の校正を受けていますが、校正プログラムに入った後、まずソフトウェアで精度テストを実行できます。テストが不合格の場合は、画面の指示に従って校正を行ってください。 ご注意:校正を行う前に、PCを電源に接続しておいてください。 |
¶ 7. スキャンファイル管理

¶ 7.1 新規
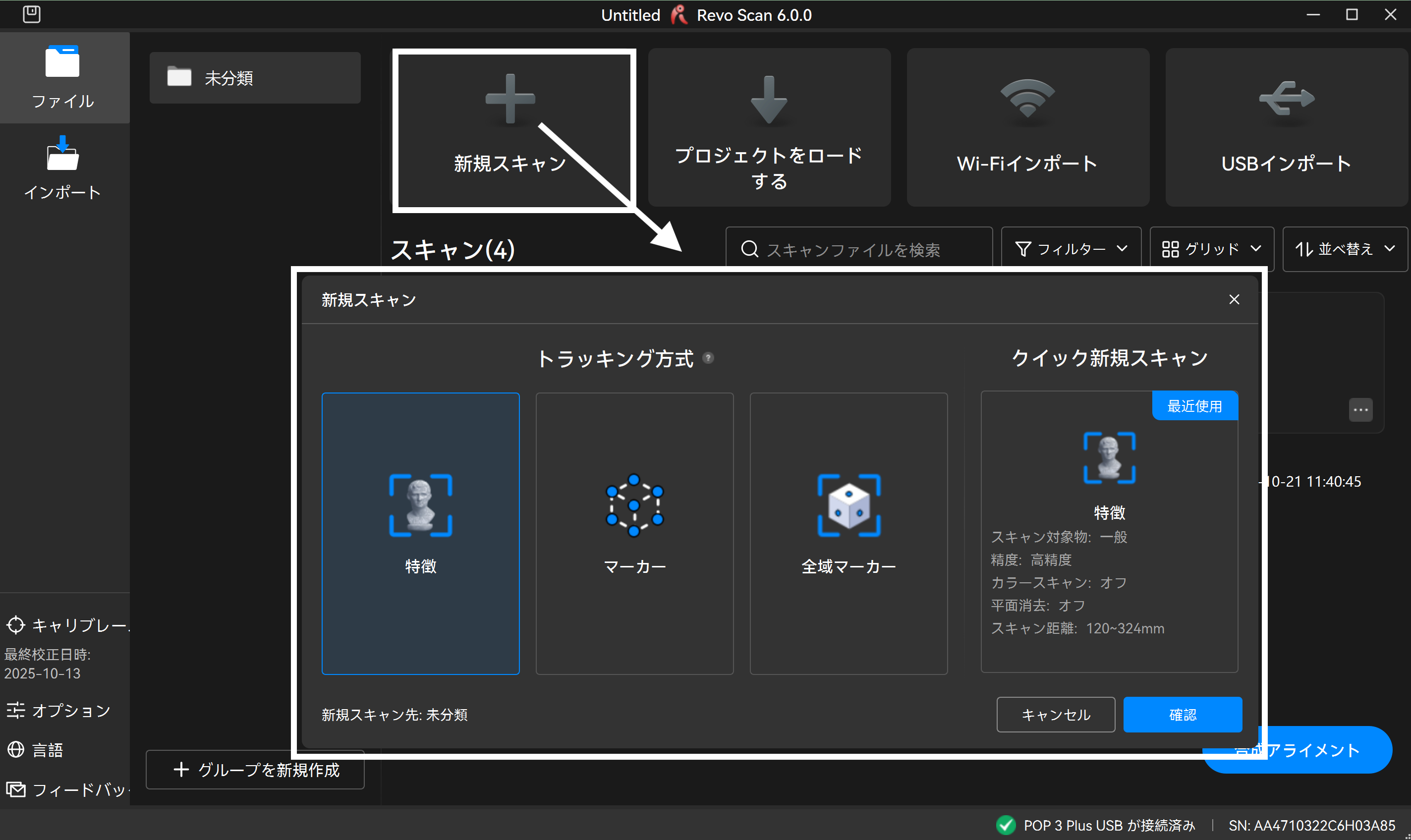
ソフトウェアを起動してファイル管理画面に入り、スキャナーの接続が完了するまで待ちます。接続完了後、[新規スキャン]をクリックします。必要なトラッキングモードを選択し、スキャンファイル名を入力して[確認]をクリックし、スキャンを開始します。また、後処理画面でも、左側のモデル一覧上部にある アイコンをクリックすると、現在のグループ内に新規スキャンを作成できます。
アイコンをクリックすると、現在のグループ内に新規スキャンを作成できます。
Revo Scan 6はテンプレートを作成してスキャンすることにも対応しています。テンプレート機能では、前回のスキャンおよび後処理のパラメータ設定(カメラ露出、スキャン精度、点間距離、メッシュ品質など)を保存できます。テンプレートを選択すると、同じパラメータが適用された新しいスキャンが作成されます。
¶ 7.2 保存
スキャンページ左上部の アイコンをクリックします。
アイコンをクリックします。
¶ 7.3 インポート
「ファイル管理」ページからモデルをインポートします。
- プロジェクトをインポート
- インポートをクリックし、PCに保存されているスキャンファイルを選んで転送します。
- Wi‑Fi経由でインポート(スマートフォン/MIRACO)
1) MIRACO/スマートフォンとPCを同じWi‑Fiネットワークに接続します。
2) PC側の Revo Scan 6 でファイル管理の「Wi‑F」をクリックし、スマホ版 Revo Scan または MIRACO からのインポートを選択して、認証コードまたはQRコードによる転送方式でインポートします。
3) MIRACO/スマートフォン側のスキャンファイル一覧でインポートするファイルを選択し、「共有」をタップします。
4) PC側の認証コードを入力するか、PC側のQRコードをスキャンしてファイル転送を開始します。
- USB経由でインポート(MIRACO)
1) 付属のMIRACOケーブルで MIRACO をPCに接続します。
2) デバイス側のポップアップで「ファイル転送」を選択します。
3) PC側の Revo Scan 6を起動すると、しばらくしてMIRACOのプロジェクトファイル一覧が表示されます。
4) インポートするファイルにチェックを入れ、右下のボタンをクリックしてPCに保存します。
ご注意:転送中はアプリを最小化したり、スマートフォンの画面をオフにしないでください。
- モデルをインポート
「モデルをインポート」をクリックし、必要な形式のスキャンファイルを選択して取り込みます。
- ドラッグ&ドロップでインポート
外部のスキャンファイルをドラッグ&ドロップでインポートできます。
ご注意:対応形式は *.stl、*.obj、*.ply、*.revox のみです。この方法では Revo Scan 5 のスキャンプロジェクトファイルはインポートできません。
¶ 7.4 モデルのエクスポート
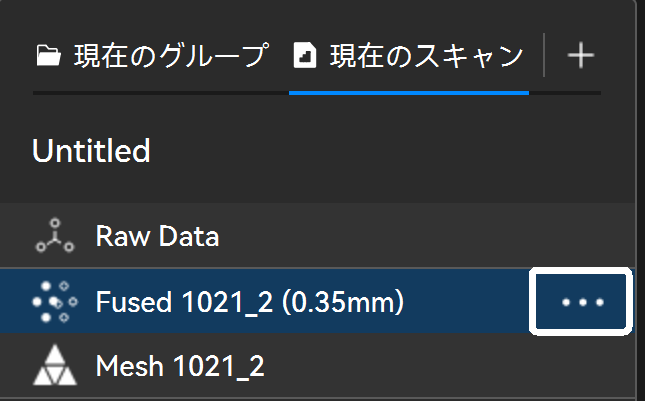
編集メニューから、各処理段階のモデルを個別にエクスポートすることができます。

またはすべての処理が完了した後、左側のモデル一覧でエクスポートしたい状態のモデルを選択し、 ボタンをクリックしてモデルをエクスポートできます。
ボタンをクリックしてモデルをエクスポートできます。
¶ 8. 初回スキャン
Revo Scan 6を初めてインストールして起動すると、初心者ガイドが表示され、基本的な操作手順を案内します。
スキャン手順に慣れていただくため、本章8.1~8.3ではPOP 3 Plusスキャナーとサンプルの彫像を用いて、Revo Scan 6 と組み合わせた一連のスキャン例を紹介します。さらに詳しい操作や品質向上のコツは、8.4 節をご覧ください。
POP 4スキャナーが対応するスキャンモードは、ほかの製品とやや異なります。初めてPOP 4を使用する場合は、POP 4初めてのスキャンをご参照ください。
具体的なスキャン手順の概要は下図のとおりです。初心者の方は、以下のフローに沿って同時進行で練習することをおすすめします。
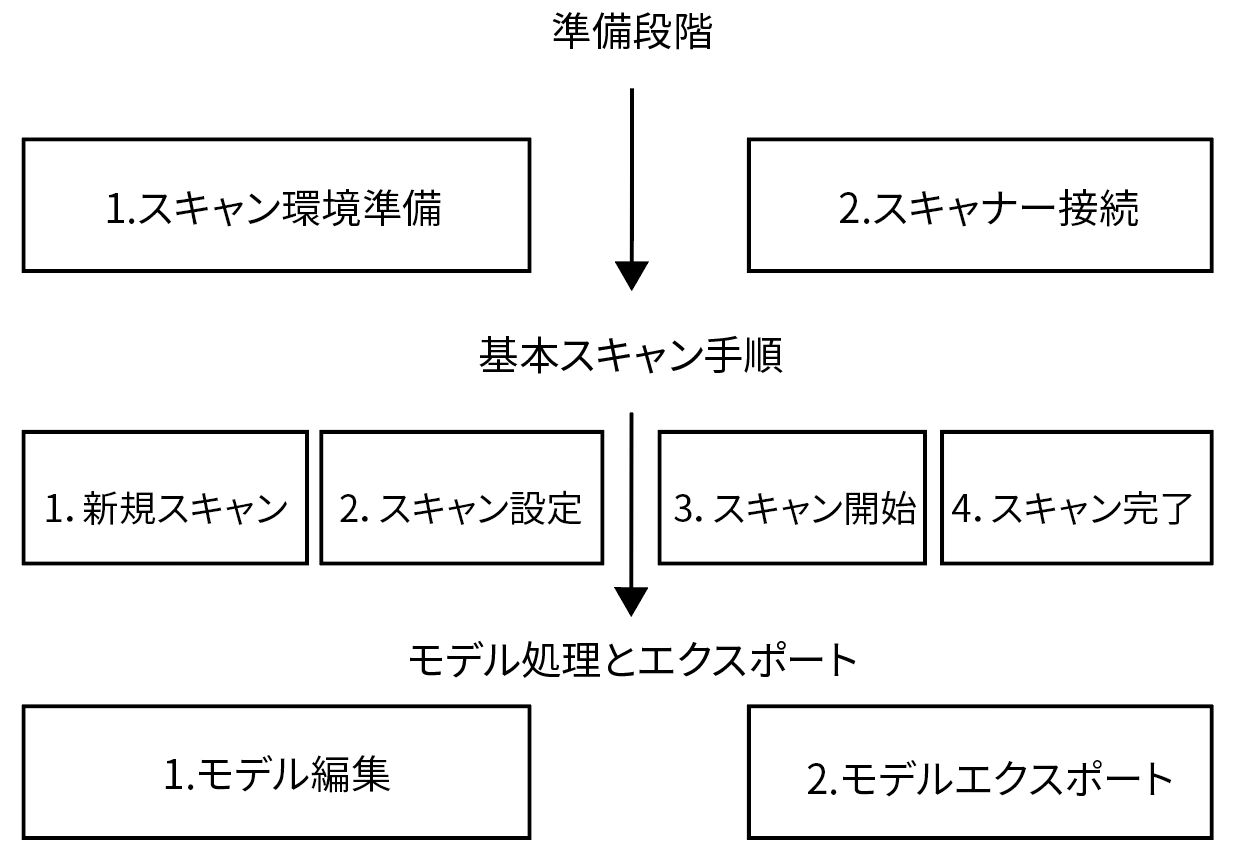
ご注意:他の機種でも操作原理は同様です。
¶ 8.1 スキャン前の準備
本節では、スキャン環境の構築とスキャナーの接続について説明します。スキャン開始前に必要な準備ですので、先に本節の内容を完了させてから続行してください。
¶ 8.1.1 スキャン環境の準備
1) スキャン背景の準備:スキャンエリアを整理し、不要物のない状態にします。
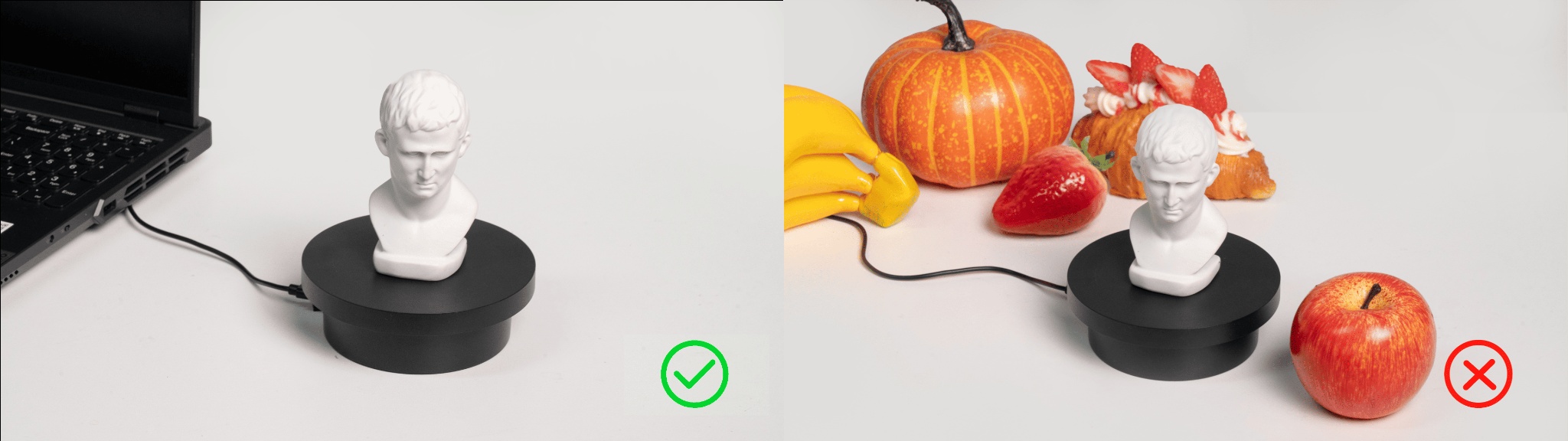
2) アクセサリーの接続:ターンテーブル用データケーブルでPCポートまたは電源コンセントに接続し、適切な回転速度に調整します。
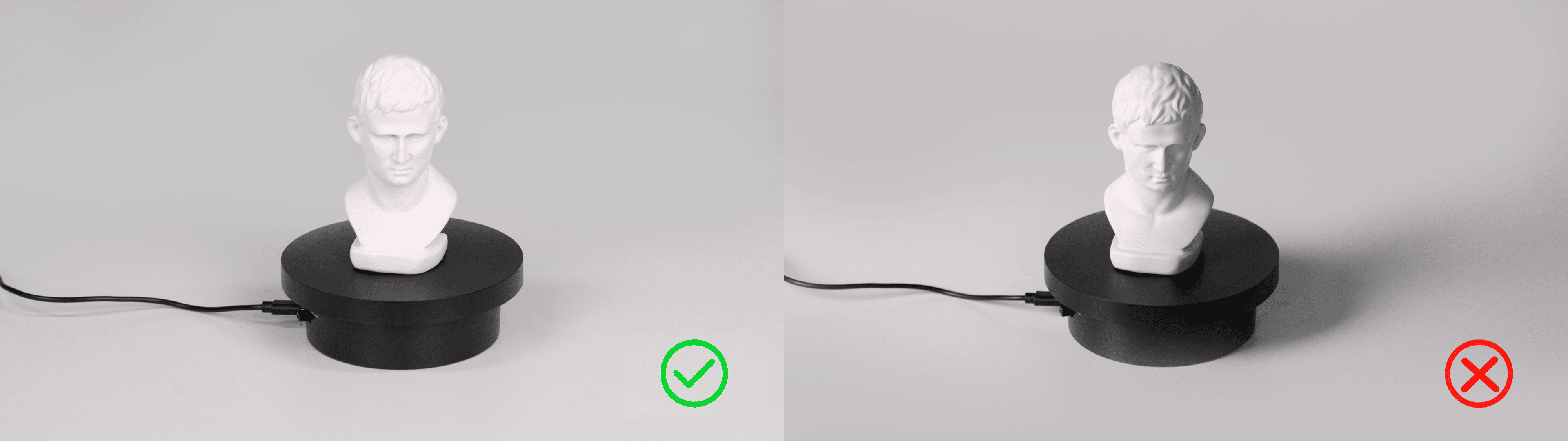
3) 対象の確認:サンプルの彫像をターンテーブルに置き、表面に影が出ないようにします。
4) スキャナーの高さと角度を調整し、カメラが対象物を確実に捉えられるようにします。
¶ 8.1.2スキャナーの接続
¶ 8.2 基本スキャン手順
本節では、一般的なスキャンを完了するための基本手順(新規スキャン、基本パラメータ設定、スキャン開始、スキャン完了)を説明します。順番に従って操作することで、スムーズにスキャンを進められます。
¶ 8.2.1 新規スキャン
1) ソフトを起動し、右下にスキャナー接続済みと表示されたら、「特徴」モードを選択し、「新規スキャン」をクリックしてスキャン画面に入ります。
¶ 8.2.2 スキャン設定
より良いスキャン結果を得るために、スキャン開始前に各パラメータの内容を理解し、適切に設定することをおすすめします。パラメータ設定は、モデルの完成度や鮮明さ、後処理の効率に直接影響します。詳しくは4.2 スキャンパラメータ設定に戻り、スキャンモード、スキャン精度、アライメント(位置合わせ)モード、スキャン対象などについてご確認ください。初心者の方は、以下を参考にパラメータを設定してください:
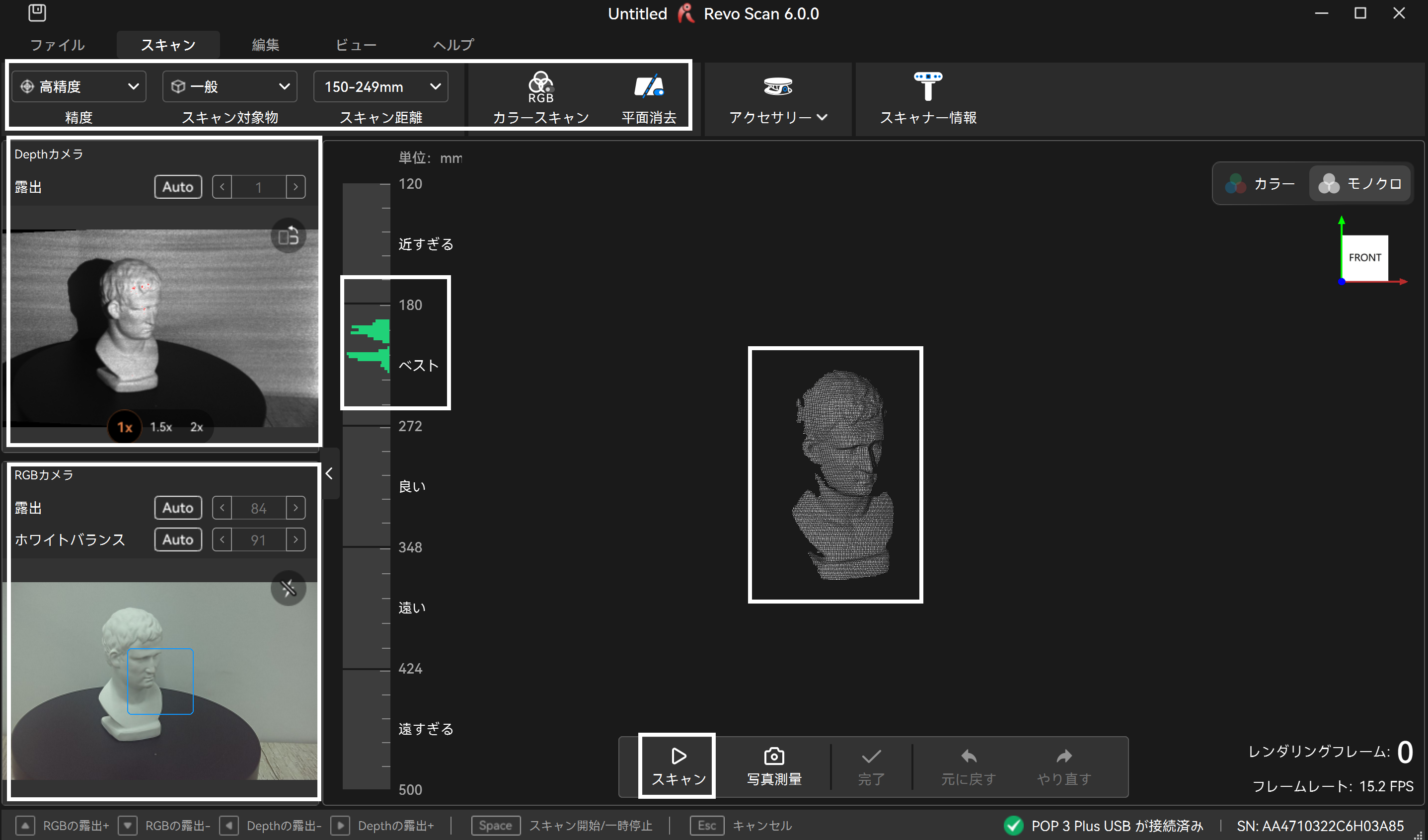
1) 左側のカメラプレビューでモデル位置を確認し、対象がカメラ視野内に入っていることを確認します。
2) 「高精度」「一般的な対象物」を選択します。必要に応じてスキャン距離を調整し、カラースキャン/平面消去のオン・オフを選択します。
3) スキャナーと彫像との距離を調整し、距離ヒストグラムの色バーが緑色になるようにします。
4) Depthカメラの露出を調整し、対象表面の赤色/青色領域が可能な限り少なくなるようにします(初心者の方には自動調整を推奨します)。
¶ 8.2.3 スキャン開始
1) 上記の設定後、プレビュー左側の距離ヒストグラムと対象の映り方を確認します。ヒストグラムが緑(ベスト/良い)で、対象の映像が鮮明かつ欠損がなければ、「開始」ボタンをクリックしてスキャンを開始します。映像に大きな欠けやぼやけが見られる場合は、パラメータ設定やスキャン角度を見直してください。
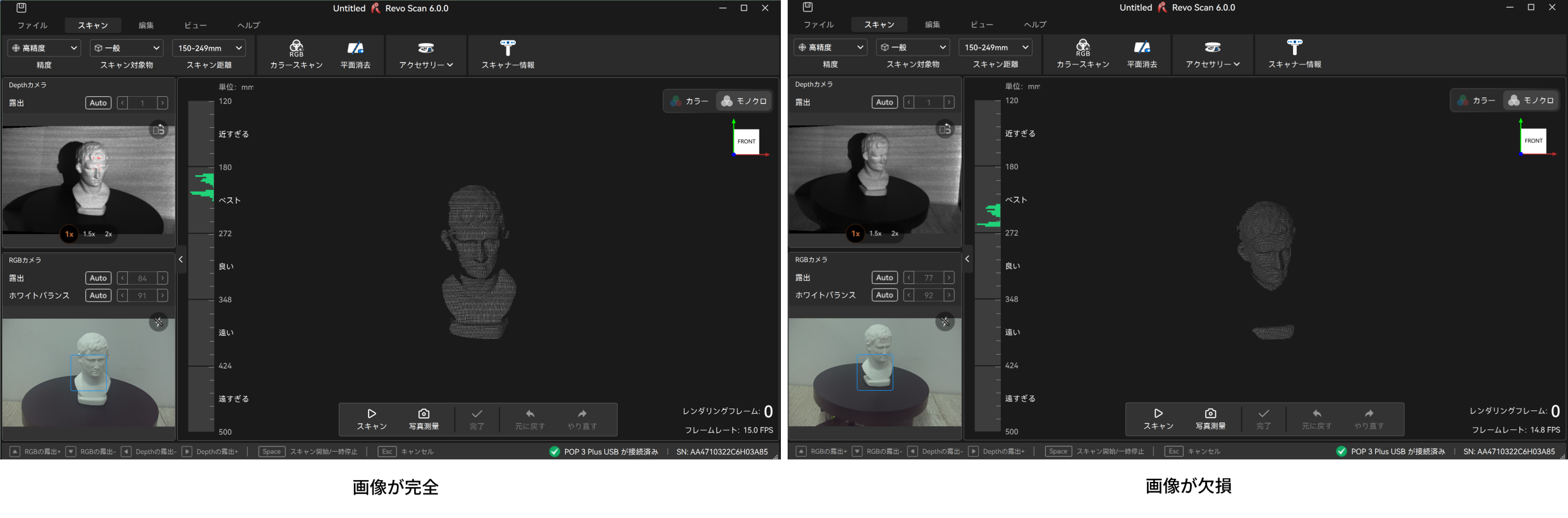
2) スキャン中は一時停止が可能で、モデル表示エリアで進捗をリアルタイムに確認できます。スキャンが不完全な場合(下図)、再度「開始」ボタンをクリックして続行します。
ご注意:取りにくい部位がある場合は一時停止し、対象の角度を調整してから再開してください。これにより、より多くのディテールを取得できます。同一箇所を何度も重ねてスキャンすると、アライメントエラーの原因になるため避けてください。
¶ 8.2.4 スキャンの完了
初心者の方は、以下を目安に終了可否を判断してください。
1) プレビュー内のモデルが完全に表示されているか。
→ 画面上のリアルタイムモデルを確認し、対象の全ての表面をカバーできているかをチェックします。特に底面・背面・隙間など見落としやすい部位に注意してください(小さな穴や欠損は後処理で手動補洞が可能です)。
2) モデルの色/テクスチャが均一か(テクスチャ対応の場合)。
→ テクスチャマッピングを行う場合、プレビューに明らかな段差、色抜け、歪みがないかを確認します。
3) 点群やメッシュに大きな欠落がないか(手動編集時の再確認に有効)。
→ 一時停止し、点群やプレビューモデルに広範な空白や未取得の構造がないかを確認します。
終了の準備が整ったら、「完了」ボタンをクリックしてスキャンを終了します。引き続き取得が必要な場合は、「再開」ボタンでスキャンを続けられます。
¶ 8.3 モデル処理とエクスポート
本節では、スキャン完了後の基本的なモデル処理と、一般的な形式でのエクスポート方法を説明します。以降の閲覧・編集・活用に便利です。
¶ 8.3.1 モデル編集
「1クリック編集」をクリックすると、モデル編集が自動で完了します。各種パラメータを手動で調整して、モデル処理を行うことも可能です。手動編集では、点群→メッシュ→カラーテクスチャの順に処理を進められます。各手順の詳しい操作方法と仕組みについては、該当章5.2点群、5.3メッシュをご参照ください。
¶ 8.3.2 モデルのエクスポート
点群・メッシュ・テクスチャの各操作時に、ツールバーからそれぞれのモデルをエクスポートできます。
エクスポート可能なファイル形式や特徴、用途などの詳細は、11.2 ファイル形式をご覧ください。
¶ 8.4 さらに詳しく
上記は初回スキャンの一連の流れを示したものです。実際の用途に合わせて、スキャン品質の最適化や効率化を図ることができます。本節では、複雑なシーンや高品質を求める場合に役立つ上級テクニックやパラメータ調整の要点を紹介します。
スキャンのコツ:
¶ 9. オプション
ソフトウェアの[オプション]をクリックして、設定画面を開きます。
¶ 9.1 全般
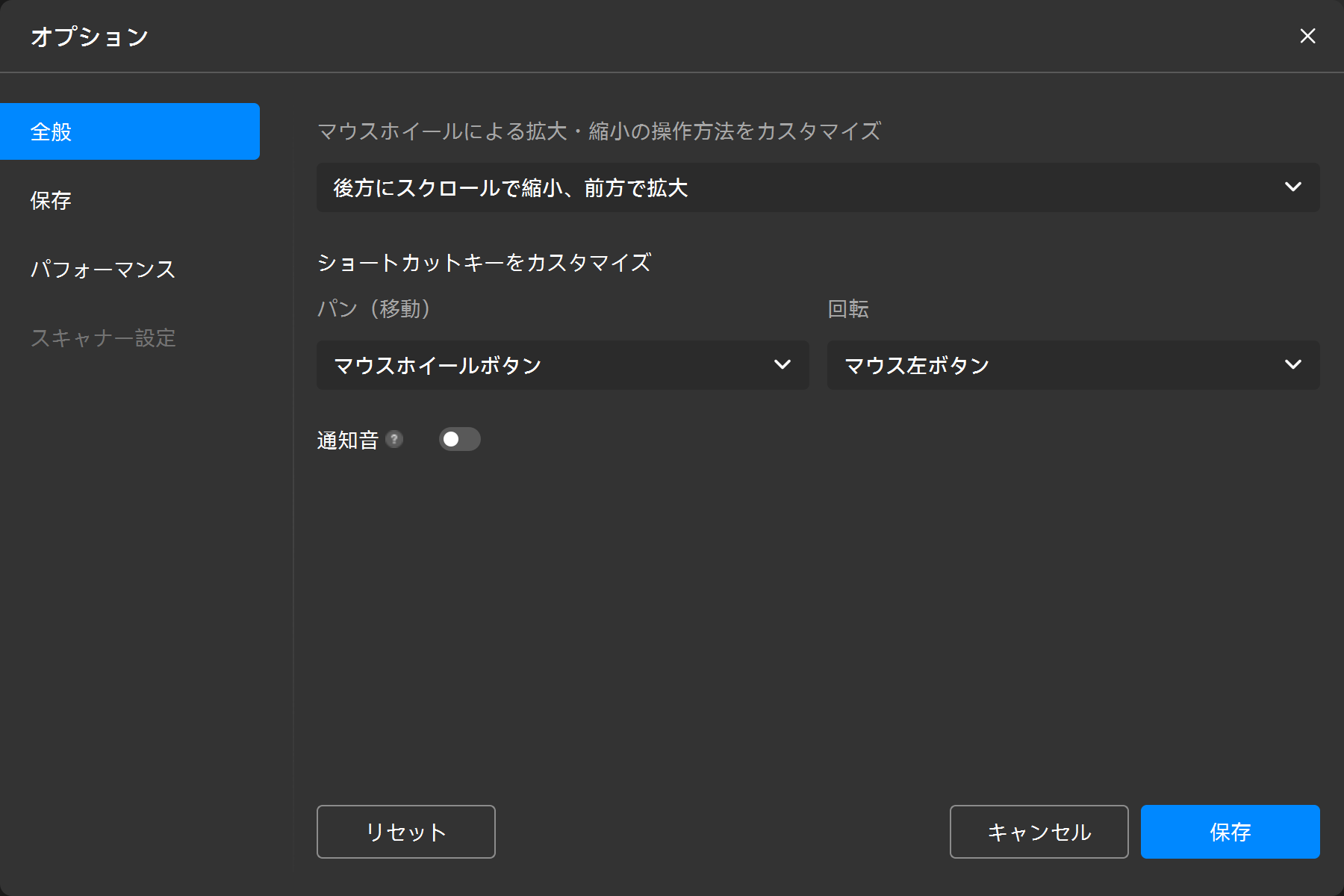 |
マウスホイールの拡大/縮小をカスタマイズ:ホイールの拡大/縮小方向を設定します。 ショートカットキーをカスタマイズ:よく使う操作に独自のキーコンビネーションを割り当て、より迅速に実行します。 通知音:オンにすると、ワンクリック処理、点群融合、メッシュ生成、テクスチャ処理の完了時に、操作完了を通知します。 |
¶ 9.2 保存
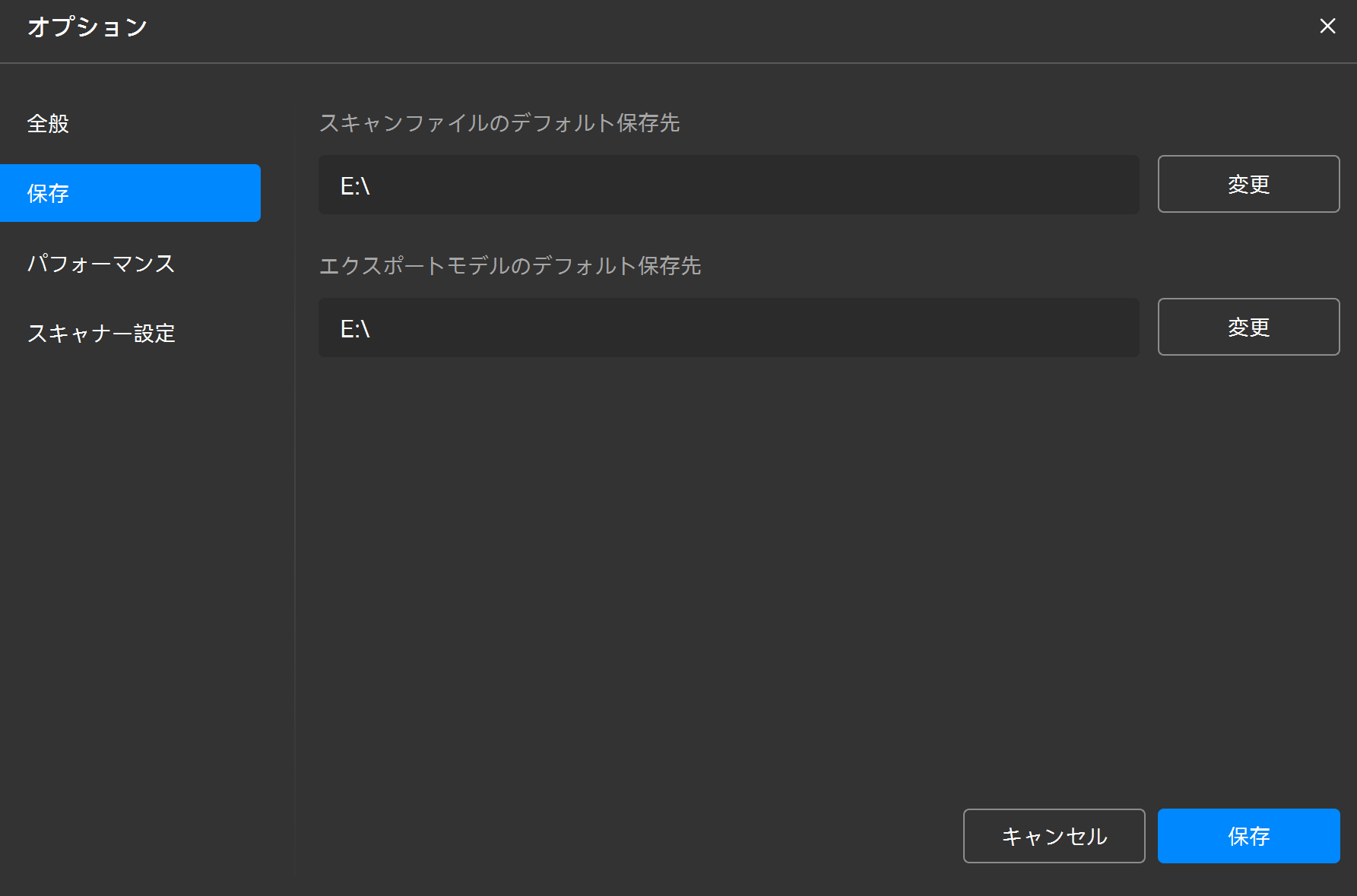 |
スキャンファイルのデフォルト保存先: スキャンを保存するデフォルトの保存場所を選択します。 エクスポートモデルのデフォルト保存先:モデルを保存するデフォルトの保存場所を選択します。 |
¶ 9.3 パフォーマンス
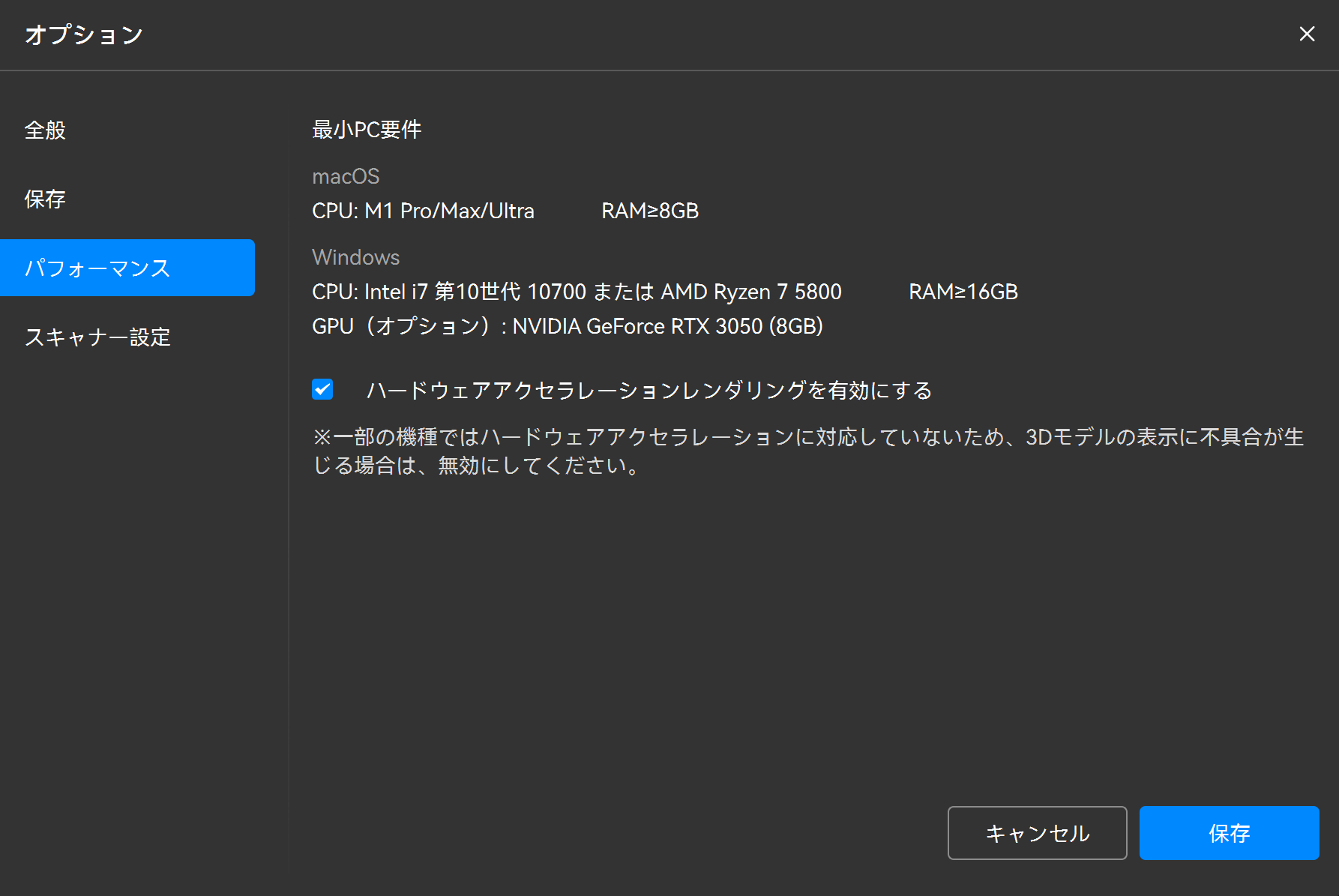 |
最小PC要件: 以下の要件を参考にPCの性能を評価し、Revo Scan 6 を快適に実行できるかご確認ください。 計算アクセラレーションモード:CPUアクセラレーション/GPUアクセラレーションに対応しています。アクセラレーションモードを適切に選択することで、フレームレートの安定性と滑らかさを向上できます。通常は、推奨される計算アクセラレーションモードを使用してください。 ハードウェアアクセラレーションレンダリングを有効にする:この機能はデフォルトで有効になっており、ほとんどのPCに対応しています。使用中に3Dモデルのレンダリングに問題が発生した場合は、ここでチェックを外してから再度モデルを確認してください。(お使いのPCに GPU がない場合は、より安定した動作のため、この機能のチェックを外すことを推奨します。)
ご注意:GPUアクセラレーションは以下のモデルのみ対応しています。
|
¶ 9.4 スキャナー設定
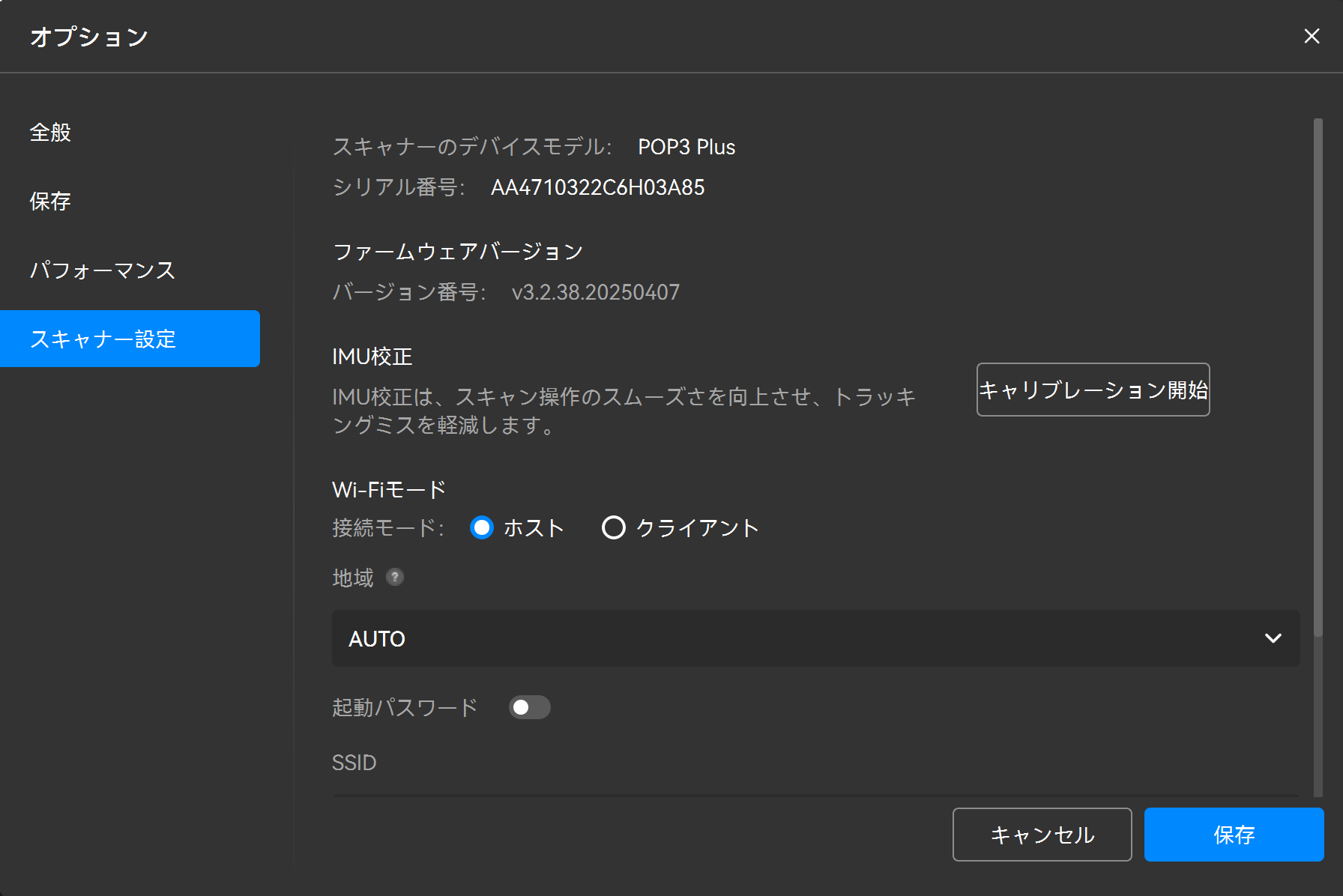 |
スキャナーのデバイスモデル:スキャナー名とシリアル番号を表示します。 ファームウェアバージョン:更新可能なバージョンがある場合は「ファームウェアを更新」をクリックし、指示に従って更新します。 IMU校正:IMU校正は、スキャナーの姿勢推定をより正確にし、スキャン結果の精度と安定性を向上させます。「校正開始」をクリックし、ガイドに従って順番に操作してください。Revo Scan 6 は定期的にIMU校正の実行をお知らせします。 ご注意:IMU校正は、IMUを搭載したスキャナーにのみ対応します。 |
 |
 |
|
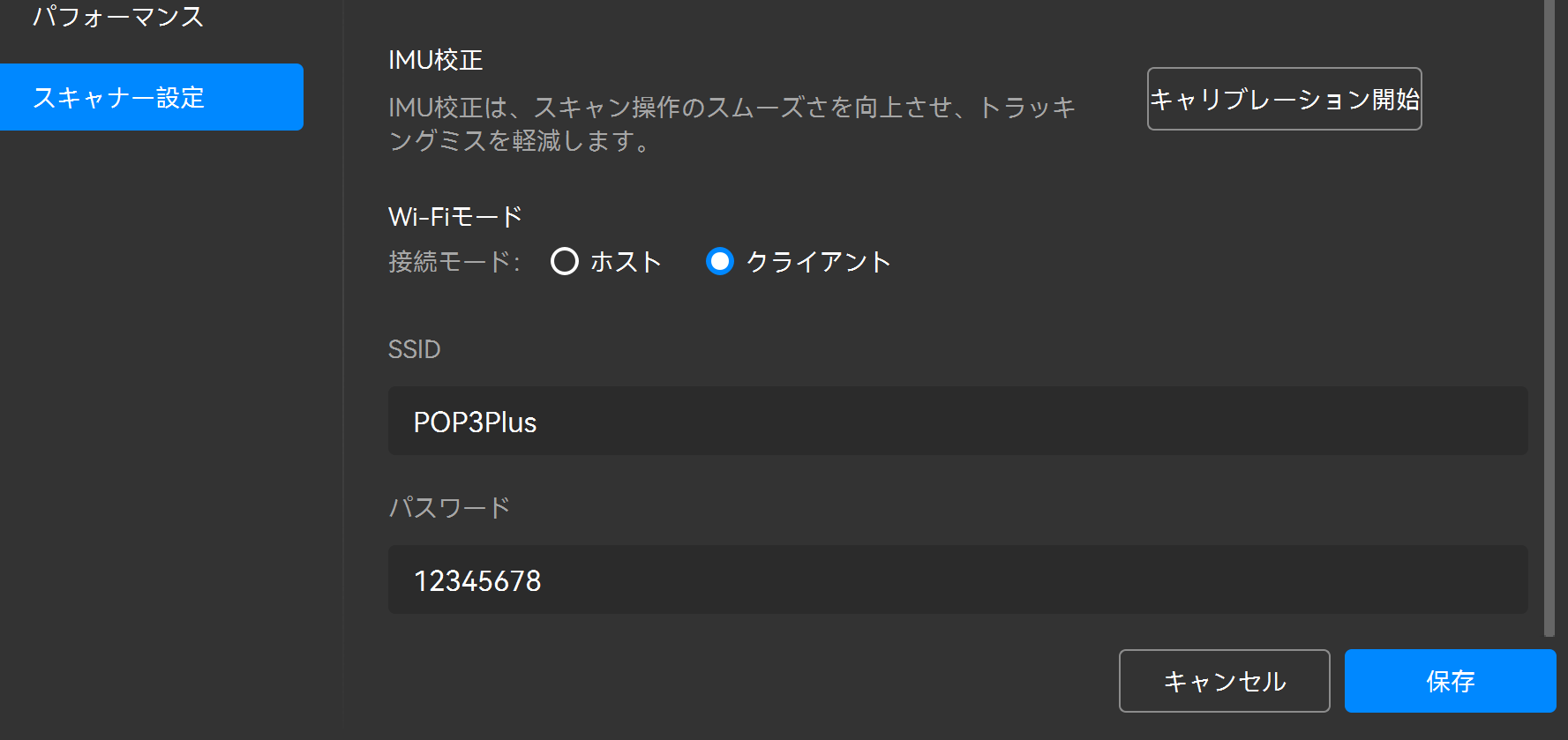
| ホストモード | クライアントモード | |
| 動作原理 | スキャナー自身の Wi‑Fi をホットスポットとしてPCと接続します。PC側はインターネットを使用できません。 | スキャナーとPCを同一の Wi‑Fi(SSID)に接続します。PC側は同時にインターネットへアクセスできます。 |
| 設定方法 |
1. PCのWi‑Fi一覧で「製品型番-REVO-XXXXXXXX」というWi‑Fiを検索して接続します。 2. ソフトを起動し、しばらく待つとスキャナーが接続されます。 |
1. ルーター接続モードで既存のWi‑Fi名(SSID)とパスワードを入力し、確認をクリックします。 2. PCが同じWi‑Fiに接続されていることを確認し、しばらく待つとスキャナーが接続されます。 |
| 注意事項 |
1. Wi‑Fi一覧にスキャナーのSSIDが見つからない場合は、「地域」でお住まいの地域に切り替えてOKをクリックし、デバイスを再起動してから再検索してください。 2. パスワードを設定した場合は必ず控えてください。忘れるとWi‑Fi接続ができなくなる可能性があります。 |
このモードはネットワーク環境(5GHz推奨)に依存します。環境が不安定な場合はホットスポットモードの利用を推奨します。 |
¶ 10. ヘルプとフィードバック
¶ 10.1 オンラインサポート
- 製品やソフトウェアに関するご質問は、公式カスタマーサービス ビデオ通話のご予約までお気軽にお問い合わせください。
- ファイル管理画面の左下にある「ヘルプ」>>「オンラインサポート」をクリックすると、Revopointサポートセンターへ移動し、各種オンラインサービスをご利用いただけます。
¶ 10.2 フィードバック
ソフトの使用中に問題が発生した場合は、ファイル管理画面の左下にある「フィードバック」から、問題の内容をご送信ください。
¶ 10.3 公式SNS

QRコードをスキャンすると、Revopointの各種公式SNSアカウントをご確認いただけます。
¶ 11. 付録
¶ 11.1 用語集
¶ 11.2 ファイル形式
¶ 11.3 ショートカットキー
|
機能 |
Windows ショートカット |
| 移動ツール | V |
| 長方形選択 | M |
| 多角形選択 | L |
| なげなわ選択 | U |
| 直線クリップ | C |
| すべて選択 | Ctrl+A |
| 選択範囲を反転 | Ctrl+Shift+I |
| 削除 | Delete/BackSpace |
| 元に戻す | Ctrl+Z |
| やり直す | Ctrl+Y |
| 新規スキャン | Ctrl+N |
| 保存 | Ctrl+S |
| モデル中心を再設定 | Alt+マウス左ボタン |
| ズーム | マウスホイール、トラックパッドでは2本指を広げると拡大、閉じると縮小 |
| パン(移動) | Shift+マウス左ボタン/マウスホイールボタンを長押ししてドラッグ |
| 選択モードで回転 | Ctrl+マウス左ボタン |
| ウィンドウにフィット | Ctrl+D |
| 初期ビューにリセット | スペース |
| 透過選択 | Ctrl+Shift+T |
| 連結成分 | B |
| 選択を減らす | Ctrl+Shift+任意の選択ツール |